无人机航摄1∶2 000立体测图关键技术探讨*
2016-05-24王亚男马燕燕万保峰普志凡
王亚男,马燕燕,万保峰,万 益,普志凡
(云南省地矿测绘院,云南 昆明 650218)
无人机航摄1∶2 000立体测图关键技术探讨*
王亚男,马燕燕,万保峰,万益,普志凡
(云南省地矿测绘院,云南 昆明650218)
摘要:近年来,利用无人机航摄制作正射影像图(DOM)的技术已经较为成熟,但利用无人机航摄制作大比例尺线划图(DLG)仍然存在一些技术问题。为此,文章对利用无人机航摄进行1∶2 000立体测图的步骤和关键技术进行了探讨,并给出一些理论性和经验性的建议。
关键词:低空无人机航摄系统;地形图;立体测图
0引言
近年来,无人机航摄以其方便、快捷、成本低、云下作业的优点迅速蔓延到各个领域。在测绘领域利用其制作正射影像(DOM)技术已成熟,获取大面积高分辨率正射影像已广泛应用于各行各业[1]。但由于正射影像图没有高程信息,往往只能作为工作底图来使用,而规划、施工、设计等多个领域必须使用带有高程信息的地形图来开展工作。因此,利用无人机影像建立立体模型来制作大比例尺地形图是一项有实用意义和前景的技术。尽管提出该想法的人很多,但对于利用无人机影像制作大比例尺地形图还存在很多技术问题。本文就无人机航摄的特点对制作大比例尺数字线划图(DLG)的关键技术进行讨论,给出一些理论性和经验性的建议,并以勐海一块丘陵地作为实验区,对利用无人机航摄制作1∶2 000地形图的可行性进行了验证。
1无人机立体测图的优势
对于DLG的测制,数字航空摄影立体测图比全野外测图省时省力,且外业工作量少,受天气影响相对较小,对工期较紧的项目有优势。数字航空摄影空三加密之后可以快速生成初步的正射影像,该正射影像以其直观性较强的优点,可以作为外业调绘的参考资料,通过后期编辑也可作为一种副产品提供给甲方。
随着数字摄影测量系统的硬件、软件各方面的持续改进,利用大飞机航飞的DLG制作技术已趋于成熟。但利用大飞机航测具有成本高、空管调度难协调、起飞场地苛刻等弊端,不适合小面积区域测图。而无人机以其成本低、灵活机动等优点开始占据小面积DLG制作的市场。
2无人机立体测图流程及立体模型建立原理
2.1无人机立体测图的流程
基于立体模型的线划图采集称为立体测图。无人机立体测图的关键步骤有航线设计、外业航飞、像控布设、空三加密、立体模型建立、线划图采集、调绘和内业编辑整理。基本流程图,见图1。

图1 无人机立体测图流程Fig.1 Flow chart of topographic map produced with UAV
2.2立体模型建立原理
在两个摄站点摄取的同一景物,只要两条同名像点的视线与眼基线在一个平面内,利用立体眼镜就能看出立体效果。
航拍出来的影像排好航带后,找到左右影像足够多的的同名点,基于每个像对同名光线对对相交于核面内的共面条件方程,解求出五个相对定向元素,即可建立像空间立体模型。通过野外像控测量,利用中心投影的地面点、摄影站点和像点三点共线方程求出七个绝对定向元素,把像空间立体模型纳入到地面摄影坐标系中,就建立起了物方空间坐标系的立体模型[2]。
处理好的物方空间坐标系下的立体模型还要进行水平核线重采样,将同名核线重采样到“水平”影像上,在数字立体测图设备下借助立体眼镜和线划图采集平台就可以进行立体测图。
3无人机1∶2 000立体测图关键步骤的质量控制
利用无人机影像测制 DLG的各个关键步骤要求比制作DOM更严格,现将应该考虑的主要因素总结如下。
3.1相机镜头的选择
低航高、大孔径、短曝光时间是无人机系统的三大关键技术指标[3]。现行最常用于立体测图的无人机应该是中小型的固定翼无人机,该类无人机价格相对便宜,姿态比旋翼机稳定。适用于该型号无人机的单反数码相机和广角镜头可选性较多,但像幅都不算大,焦距也较短。
立体像对的平面精度取决于空三加密的精度,高程精度由传感器本身设计的基高比决定[4]。基高比是基线与相对航高的比值,像幅长边垂直于飞行方向时,基高比的影响因素有影像宽度、相对航高、相机焦距、像素大小、航向重叠度,具体关系如下:

(1)
(2)
式中:f为焦距;GSD为地面分辨率;H为相对航高。理想基高比为1∶1~1∶1.5[4],对于目前使用的无人机,基高比都较小,达到1∶1.5都较难,因此只能尽量去增大基高比来提高高程精度。
理想状态下,要提高基高比可选择焦距短、像素大、像幅宽的镜头。对于平原、丘陵地区焦距较小的相机是不错的选择,但如果是建筑物较高或者是山地、高山地的测区,为了减少投影差就必须选择焦距较长的相机。将数码相机像幅短边垂直于航线方向放置可增大影像宽度,但这样设置会增加航线的长度,可综合考虑后再选择。
从式(1)来看,也可通过缩小航向重叠度来增大基高比,但用于立体测图的航向重叠度不宜太小,在满足至少航向60%重叠和旁向30%重叠的前提下还应该更大一些,因为较高航向和旁向重叠虽然会让基高比变小和影像数目过多,但在空中三角测量时能够得到更稳定的几何连接关系,提高平差解算的精度和可靠性[5],而且大重叠度的摄影测量正在成为航空摄影测量的主流[6]。
为了提高高程精度和飞行效率,增大基高比,应该选择像素大、像幅较宽的镜头,有条件的情况下可考虑利用中型无人机搭载双拼或四拼的镜头进行拍摄。
3.2外业数据获取关键技术
3.2.1影像质量控制
航线设计时,在保证重叠度和地面分辨率满足相应成图比例尺的要求之外,如果是一个飞行架次中区域地形起伏较大,可以将航线设计的基准面略小于平均海拔,从而使区域内较低地区地面分辨率GSD能达到成图要求[7]。
飞行质量也是立体模型建立好坏的一个决定性因素。一个架次内保证照片的倾角小于5度,旋角小于15度。对于立体测图,倾角和旋角还应更小一些,否则影响空中三角测量精度,且会缩小立体模型的有效面积,较严重的情况下还会导致构建立体模型失败,从而让线划图采集时出现漏洞或模型间的跳变较大。
3.2.2像控质量控制
像控布设多数采用区域网布点法,为了减少误差累积,使整个测区的空三加密结果可靠性更强,一般立体测图的像控布设应较密集,如能达到每张影像均有像控点分布最好,特别是高程控制点应该分布均匀,并且达到一定的密度。
一般情况下布设像控点就是选取测区内明显、固定的特征点,但并非所有的测区都能找到足够多的特征点来布设像控,因此可以在航飞之前人为布设一些能在影像上清晰识别的特征点,并利用GPS RTK实测出这些特征点的坐标,作为空三加密阶段的像控点[8]。
3.3内业数据处理关键技术
3.3.1原始影像处理
由于数码相机拍摄的影像畸变都较大,因此必须在航拍前对相机的内方位元素和透镜的畸变差进行检校[9],并利用检校参数对原始影像进行主点偏移纠正和畸变纠正。
为了使相对定向时同名点的匹配更加准确,往往需要利用影像增强技术来增强原始影像的反差,使影像中模糊的纹理变得清晰,增强纹理细节,抑制噪声的影响。
3.3.2空三质量控制
无人机空三加密主要采用的是光束法区域网平差的方法,该方法是以一幅影像所组成的一束光线作为平差的基础单元,以中心投影的共线方程作为平差的基础方程,建立全测区的统一误差方程式,整体解求区域内每张像片的六个外方位元素以及所有待求点的地面坐标[2]。
用于立体测图的测区,要尽量确保每张影像上的加密点密度和均匀性,这就要求测区内航向三度连接点和旁向四度点都要足够多和准确。像点坐标的匹配和量测精度是决定立体像对高程坐标精度的重要因素之一[10]。对于测制1∶2 000的线划图,在进行相对定向时,要保证同名点中误差不大于2/3个像素,最大误差不超过3/4个像素。对于丘陵地,加像控后基本定向点平面和高程中误差均控制在0.6 m以内。立体测图时,可以对每个立体模型的绝对定向结果进行检查,选择性地采用精度较高的模型进行线划采集。
3.3.3线划图采集技巧
线划图的采集以切准地面为原则,由于每个人有视觉差异,初次进行立体测图的作业人员需要进行立体观测的训练才能上岗作业。线划图采集时尽量选取立体模型中间位置来采集,因为越靠近边缘的位置模型接边差越大。
描绘房屋和街区轮廓时,应先以测标中心切准房角或轮廓拐角,然后再打点连线。各种道路、管线、沟堤等应跟迹描绘,走向明确,衔接合理。用符号表示的各种地物,其定位点或定位线应描绘准确。
等高线宜采用切准模型描绘。在等倾斜地段,当计曲线间距小于5 mm时,可只测计曲线,内插首曲线。有植被覆盖的地表,宜切准地面描绘,当只能沿植被表面描绘,应加植被高度改正;对于等高线描绘误差,平地、丘陵地不应大于1/5基本等高距,山地、高山地不应大于1/3基本等高距。
像对间地物接边差应小于地物点平面位置中误差的2倍。等高线接边差宜小于1个基本等高距,山地、高山地可适当放宽。
3.4野外调绘
立体测图一个重要的工序就是调绘。凡测区内的地物、地貌要素均需由外业在实地进行调绘,并对影像看不清、判不准、以及航摄后新增、变化地物,均需在野外补测、补调。比如,由于树木或者建筑物的遮挡,必然会有一些地形和地物在室内的立体模型中看不到,如水沟、涵洞等。还有河流的名称、水流的方向、房屋的层数、村庄和单位的名称等,这些都需要进行实地调查才能在图上标注。对于比1∶2 000更大比例尺的地形图还要考虑房檐改正。
4应用实例
本文选取勐海境内一块丘陵地作为试验区域,对无人机1∶2 000立体测图进行探讨。该测区面积10 km2,平均海拔1 200 m,高差100 m。测区内有村庄、道路、农田、林地等地物。
航飞采用快眼Ⅱ型固定翼无人机。该区域为丘陵地、地形起伏不大,选取搭载焦较短的Canon EOS 5DⅡ相机,焦距为24.36 mm,像幅大小为5 616×3 744像素(pixel),像素尺寸为6.41 μm。相机检校参数(单位:pixel),如表1所示。
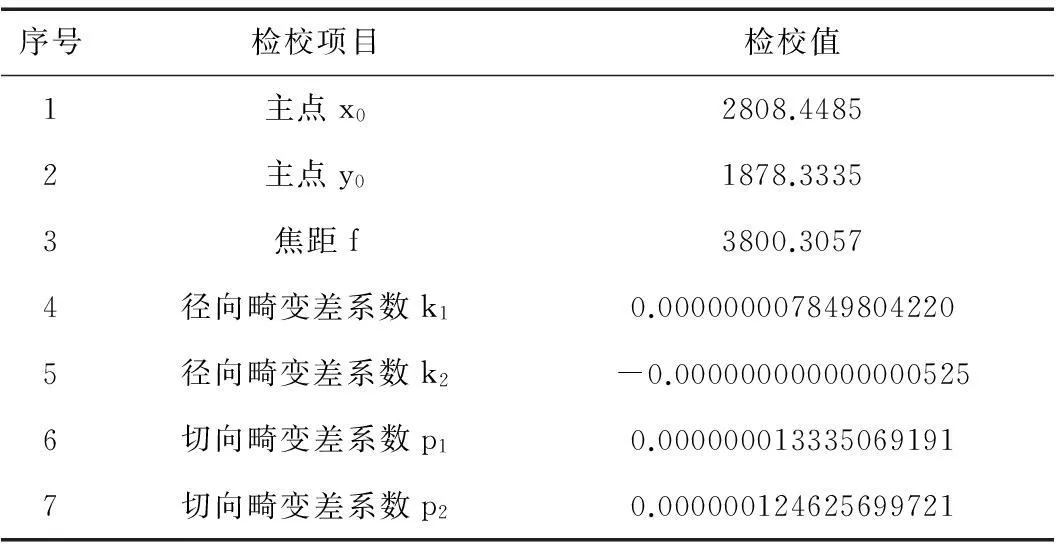
表1 相机检校文件
该测区共布设五条航带,有效影像118张。设计相对航高为750m,航向重叠70%,旁向重叠36%,基高比在1∶2.5左右。尽量选择天气晴朗、能见度高的时间进行航摄。获取的影像分辨率优于0.2 m,测区内航高差小于10 m。航飞之前已用石灰撒出了49个十字形的像控点,该十字形像控点的规格为0.2 m×1.5 m,具体形式如图2所示,并利用GPS RTK实测出这些点的坐标。选取均匀分布于测区的41个点作为基本定向点,3个点作为空三检查点,5个点作为线划图采集后的检查点。基本保证每张影像都有像控点覆盖,以控制误差累积,控制点布设情况如图3所示。每个像对都超过30个加密连接点,整个测区连接点的中误差为0.003 72 mm,小于2/3个像素。经过光束法区域网平差之后定向点平面位置中误差为0.19 m,高程中误差为0.21 m,检查点平面位置中误差为0.41 m,高程中误差为0.38 m。立体模型经过绝对定向后连接点的平面和高程中误差均在0.5 m以内。

图2 像控点示意图Fig.2 Diagram of image control points
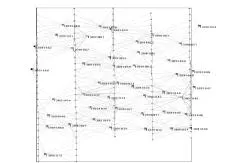
图3 区域网平差网形图Fig.3 Block adjustment network diagram
利用VirtuoZoNT建立立体模型,导入EPS线划图采集平台进行立体测图,分别采集了房屋、道路、高程点和等高线等,并利用该区域内同期已通过验收的1∶2 000线划图进行对比,房屋和道路两者典型的差异如图4(a)和图4(b)所示(深色线表示野外实测,浅色线为立体测图所得)。房屋是未进行房檐改正的情况下做的对比,一般情况下1∶2 000的地形图不需要进行房檐改正,更大比例尺的地形图在进行野外调绘时还需要进行该项工作;道路是未调绘之前作的比较,道路产生差异的主要原因是道路边缘有树木遮挡,对于植被覆盖的路边最好进行调绘修正。

(a)房屋差异图 (b)道路差异图图4 房屋和道路差异图Fig.4 The difference figures of buildings and roads
对有差异的房角点、道路转折点和相同位置的高程点进行了精度对比分析,并作了精度统计,按同精度检测中误差公式进行精度统计,公式为:
(3)
式中:M为成果中误差;Δi为较差;n为检测点总数。
选取了测区内160个房角点进行精度统计,中误差为0.46 m;选取113个道路特征点统计的中误差是0.63 m;选取120个高程点统计的中误差为0.48 m;等高线的差异在1/2个等高距之内。以上精度均满足1∶2 000地形图对平面和高程的精度要求。选取一块利用立体测图经外业调绘和内业编辑后的线划图与正射影像叠加的效果图,如图5所示。建议将这种带有等高线的影像图用于土地开发整理、土地资源调查、工程规划、设计和施工等,该类图不仅含有高程信息,也比线划地形图更直观,可提高用图效率。

图5 立体测图线划图与DOM叠加效果图Fig.5 Superimposed map of DOM and DLG obtained by stereo mapping
5结论
本文论述了无人机航摄立体测图各个步骤的关键点。总体来讲,在具体操作中要选择合适的相机、精心设计航线、合理布
设像控点、严格进行空三加密的解算、认真调绘编辑,最终得到的线划图才能达到规范的精度要求,
经过实践,利用无人机低空航摄制作1∶2 000地形图,在保证精度达到规范要求的前提下,相对于全野外作业更省时省力。将立体测图得到的等高线与生成的正射影像图叠加所得的图形,以其直观高效的优势,在国土资源、规划、设计等各个领域也将发挥较大作用。
[参考文献]
[1]杨润书,苏建平,马燕燕,等.云南首次大面积利用低空无人机进行航摄及1∶2 000 DOM的制作[J].地矿测绘,2014(1):1-4.
[2]朱肇光,孙护,崔炳光.摄影测量学[M].2版.北京:测绘出版社,1995.
[3]林宗坚.UAV低空航测技术研究[J].测绘科学,2011(1):5-9.
[4]王志豪,刘萍.无人机航摄系统大比例尺测图试验分析[J].测绘通报,2011(7):18-20.
[5]张永军.无人驾驶飞艇低空遥感影像处理[J].武汉大学学报:信息科学版,2009(3):284-288.
[6]杜全叶,陆锦忠.无人飞艇低空摄影测量系统及其DOM制作关键技术[J.测绘通报,2010(6):41-43.
[7]杨润书,马燕燕,殷海舟.低空无人机航摄系统地面分辨率与航高的关系研究[J].地矿测绘,2013(3):1-2.
[8]万保峰.无人机低空航摄系统在云南山区1∶2 000地形图测绘中的应用[J].山东工业技术,2015(11):234-235.
[9]李兴华,罗秀兰,龚绪才.无人机航测技术应用于公路崩滑陡峭地段测量分析[J].公路交通技术,2012(4):49-53.
[10]毕凯,李英成,丁晓波,等.轻小型无人机航摄技术现状及发展趋势[J].测绘通报,2015(3):27-31.
Discussion on Key Technology of 1∶2 000 Stereo Mapping Based on UAV
WANG Ya-nan,MA Yan-yan,WAN Bao-feng,WAN Yi,PU Zhi-fan
(YunnanInstituteofSurveyingandMappingofGeologyandMineralResources,KunmingYunnan650218,China)
Abstract:In recent years,the technology of using UAV aerial system to produce DOM has been matured,but there are still some technical problems to produce large scale DLG by using UAV aerial system.Therefore,the article discusses the operation steps and the key techniques of 1∶2 000 stereo mapping by using UAV aerial system,and gives some theoretical and experiential suggestions.
Key words:low-altitude UAV aerial system;topographic map;stereo mapping
作者简介:王亚男(1986~),女,云南保山人,硕士,工程师,现主要从事航空摄影测量和影像处理方面的工作。
中图分类号:P 23
文献标识码:B
文章编号:1007-9394(2016)01-0030-04
收稿日期:2015-10-19
地矿测绘2016,32(1):30~33
CN 53-1124/TDISSN 1007-9394
Surveying and Mapping of Geology and Mineral Resources
