菱形翼布局无人机多舵面控制特性研究
2016-05-23王亚龙祝小平周洲王睿
王亚龙, 祝小平, 周洲, 王睿
(1.西北工业大学 航空学院, 陕西 西安 710072;
2.西北工业大学 无人机特种技术国家重点实验室, 陕西 西安 710065)
菱形翼布局无人机多舵面控制特性研究
王亚龙1,2, 祝小平2, 周洲1,2, 王睿1,2
(1.西北工业大学 航空学院, 陕西 西安 710072;
2.西北工业大学 无人机特种技术国家重点实验室, 陕西 西安 710065)
摘要:采用控制分配技术对菱形翼布局无人机进行控制律设计,可以充分发挥其多舵面的优势,且在故障情况下进行控制重构而不改变飞行控制律。采用PID方法设计以虚拟舵面为输入的基本控制律,然后分别采用不动点迭代法、序列二次规划法(SQP)设计线性、非线性控制分配律,对比两种控制分配方法对控制系统的影响。经过仿真验证表明,由于阻力舵非线性舵效的影响,线性分配方法对指令的跟踪存在一定的误差,但是通过调整航向增稳系统的控制增益可以使控制系统具备足够的鲁棒性以克服跟踪误差的影响;非线性控制方法可以准确跟踪控制指令,但是其比线性分配方法计算耗时长。
关键词:菱形翼布局; 控制分配; 不动点法; SQP法
0引言
菱形翼布局飞机具有升阻比高、结构重量轻、隐身性能好等特点,是一种新型布局的高空长航时传感器无人机[1]。菱形翼布局无人机具有航向弱静不稳定的特点,在基本控制律设计时须设计相应的控制增稳系统。同时菱形翼布局无人机采用多舵面的布局特点,提高了其操纵的灵活性以及容错能力,多舵面控制特性的研究也是菱形翼布局传感器无人机的关键技术之一。
基于控制分配设计多操纵面飞机控制系统,国内外学者进行了许多研究,在早期推力矢量研究中,NASA兰利研究中心的研究人员就已经提出了“伪控制”和“控制协调”的概念。文献[2]应用控制分配方法设计了X-35B的飞行控制系统;文献[3]在F-15 ACTIVE验证机上进行多操纵面控制分配技术研究,并取得了一定的研究结果;文献[4]研究了飞翼布局作战飞机的控制分配方法;文献[5]研究了控制分配技术在无尾飞机纵向控制系统中的应用。
本文研究的菱形翼布局无人机采用翼尖布置的开裂式阻力方向舵实现航向控制,但是开裂式阻力舵舵效具有非线性以及纵向与横航向耦合的特性。采用控制分配的方法既可以充分利用其多舵面的特性,又可以消除阻力舵带来的舵效耦合特性。基于分层控制的思想,将多操纵面无人机的飞行控制系统分为基本控制律和控制分配律两层。应用工程上常用的PID控制理论设计以虚拟舵面为输入的基本控制律,用不动点迭代法和序列二次规划法(SQP)设计控制分配律。这种飞控系统设计方法具有较强的鲁棒性,操纵面出现故障时,仅需改变控制分配策略即可实现对飞机的稳定控制,同时可以根据不同的飞行状态选择不同的控制分配策略。
1动力学特性
1.1操纵性
本文研究的菱形翼布局无人机以及舵面配置如图1所示(箭头指向为无人机飞行方向)。无人机前后翼在同一平面中,即前后翼均无上下反角。翼尖处的舵面(δl6,δr6)为开裂式阻力舵,未开舵的地方作为安装传感器的位置,以实现360°全向探测。

图1 无人机布局及舵面布置示意图Fig.1 Scheme of diamond-wing configuration
菱形翼布局无人机除了阻力舵以外的其他舵面具有较好的线性舵效,而阻力舵的偏航力矩具有显著的非线性特点,舵效随着舵偏角的增加而增加(见图2)。
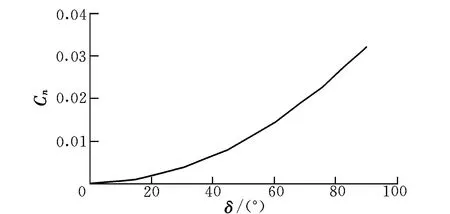
图2 右侧阻力舵的偏航舵效特性(α=2°)Fig.2 Control effectiveness of right drag rudder(α=2°)
通过可达力矩集可以直观地看出菱形翼布局无人机所能提供的三轴力矩系数范围,可以为控制律的设计提供参考。菱形翼布局无人机所有舵面三轴力矩舵效进行线性化后的舵面三轴力矩系数可达集如图3所示。偏航力矩系数可达范围大约为:-0.04~0.04;俯仰力矩系数可达范围大约为:-1~1;滚转力矩系数范围大约为:-0.1~0.1。
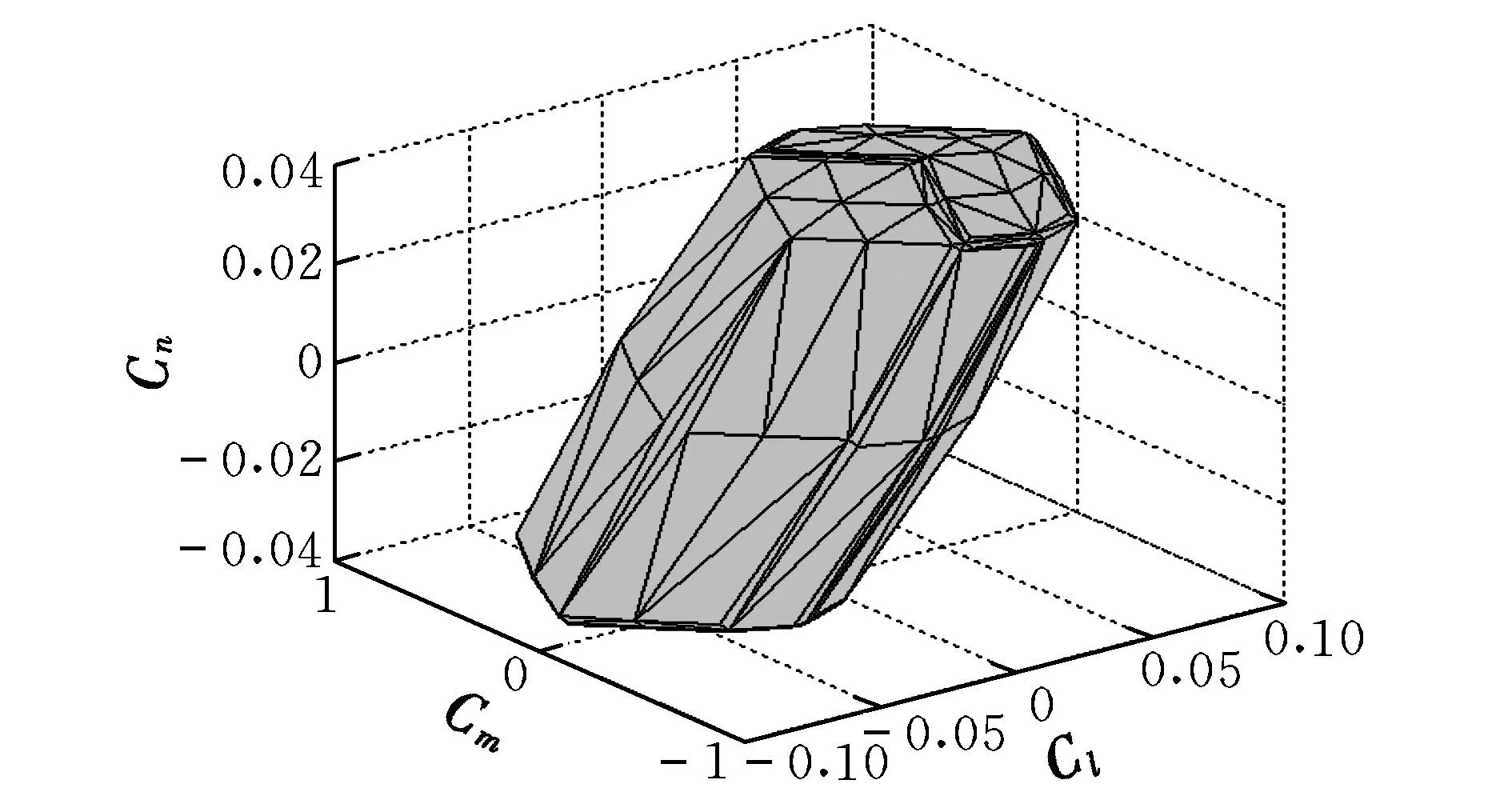
图3 菱形布局无人机三轴可达力矩系数集Fig.3 Three axis AMS of diamond-wing UAV
1.2稳定性
菱形翼布局无人机由于没有舵向安定面,其航向稳定性差,将其稳定性导数与类全球鹰HALE飞机的常规布局进行对比,如表1所示。可以看出,菱形翼布局航向静稳定性导数为负值,其绝对值大约为常规布局的1/10,具有航向弱静不稳定性的特点,同时,其航向阻尼约为常规布局的1/10。因此,进行控制律设计时需要设计相应的航向控制增稳系统,以改善其航向稳定性。

表1 稳定性导数对比
2基本控制律设计
针对多操纵面无人机的特点,采用分层结构设计控制系统[6],将基本控制律设计与控制分配律设计分离,基本控制律生成总的期望控制效应,控制量在执行器中的分配由独立的控制分配模块完成。控制系统结构如图4所示。

图4 控制系统结构图Fig.4 Scheme of control system
文献[7]包含多个操纵面的过驱动无人机小扰动数学模型为:

(1)
y=Cx+Du
(2)
式中:x∈Rn为状态向量;u∈Rm为虚拟舵偏量;A∈Rn×n;B∈Rn×m。对于纵向小扰动方程,ulon=[δCl,δCm,δt]T,x=[V,α,q,θ]T;对于横航向小扰动方程ulat=[δCY,δCl,δCn]T,x=[β,p,r,φ]T。其中,纵向以CL,Cm为虚拟舵;δCl,δCm为虚拟舵偏;横航向的虚拟舵定义类同。
基于虚拟舵为输入的小扰动模型,以经典PID控制理论为基础,设计俯仰角保持及偏航角保持控制律。
俯仰角保持与控制系统控制律如式(3)所示, 其中速度反馈可以改善长周期模态特性,而俯仰角速度反馈可以改善短周期模态特性。
(3)
式中:Kq,Kθ,Kθi,KVi为控制增益;θc为俯仰角指令。
偏航角保持与控制系统以滚转角保持与控制系统为内回路。其中侧滑角反馈以及偏航角速度反馈用来增强航向静稳定性,改善荷兰滚模态特性。具体控制律为:
(4)
式中:Ip,Iφ,Kβ,Kr,Kψ,Iψ为控制增益;φc为滚转角指令;ψc为偏航角指令。
3控制分配律设计
考虑作动器位置饱和限制,带约束的标准线性控制分配问题可以表述为:

(5)

采用不动点迭代法进行线性分配,线性分配时主要对舵效进行线性拟合,SQP法进行非线性分配,非线性分配时对舵效进行三次多项式拟合。
3.1不动点迭代法
以伪指令的误差以及用舵量最小为分配目标,得到混合优化目标:
(6)
式中:ε为误差最小目标和用舵量最小目标之间的权值调节系数,1-ε的取值必须足够大,以保证解的收敛速度,ε同时足够小使误差最小目标作为首要的优化目标。不动点法求解时根据约束条件进行反复迭代,逐步逼近,最终求得最优解。在迭代开始前,取一个合适的初值,即可迭代求得精确解。选用不动点法对上述问题进行求解时,只需进行下式的迭代。
(7)
式中:η=(‖M‖F)-1;M=(1-ε)BTB+εI;sat(·) 为舵面饱和函数,可表示为:


3.2序列二次规划法
考虑舵效非线性的控制分配问题可以以混合目标优化形式给出:
(8)
式中:w为误差以及用舵量之间的权重调节因子;B(δ)为拟合后得到的舵效非线性模型;Md为力矩指令;δp为舵偏量基准。引入松弛变量us1,us2,将上式转化为包含不等式约束的非线性规划问题,标准非线性规划问题可以用SQP算法进行求解。
(9)
4仿真分析
以菱形翼布局无人机为研究对象,取巡航状态H=20 000 m,Ma=0.6,对设计的控制律进行仿真验证。操纵面输入为:
操纵面约束为:
经过设计,取纵向控制律增益:
取横航向控制律增益:
给定纵向俯仰角指令θc=5°,横侧向偏航角指令ψc=5°。分别采用不动点法设计的线性分配法以及采用SQP法设计的非线性分配法进行仿真分析。仿真模型采用Simulink搭建,采用M语言编写分配算法,仿真步长0.001 s,运行处理器Intel 3.0 GHz。
采用不动点迭代法设计的线性控制分配方法作为控制分配律,仿真结果如图5~图7所示。由图可知:由于偏航舵效非线性的影响,偏航力矩指令跟踪存在较大误差,降低了航向增稳系统的效果,使得各状态量难以在短时间内收敛。相反,纵向舵效具有显著的线性化特点,俯仰力矩指令跟踪效果很好,因此纵向指令跟踪特性较好。

图5 不动点迭代法的纵向响应曲线Fig.5 Longitudinal responses of fix-point method


图6 不动点迭代法的横航向响应曲线Fig.6 Lateral-directional responses of fix-point method

图7 不动点迭代法的虚拟舵指令跟踪曲线Fig.7 Virtual rudder command tracking curves of fix-point method
为了使采用线性控制分配律设计的控制系统可以跟踪给定指令,必须在设计航向增稳控制系统时考虑舵效非线性的影响,在初始设计的基础上增加航向稳定性,以弥补指令跟踪误差所引起的航向稳定性减小,经过多次仿真对航向的增稳控制增益进行调整,最后调整取Kβ=-0.5。横航向的仿真结果如图8所示。可以看出,增加稳定性后系统可以有效补偿跟踪误差所带来的稳定性减弱的问题,指令跟踪效果较好。
采用SQP法设计的非线性控制分配律进行控制仿真,仿真时取初始设计的控制增益,其结果如图9~图11所示。由图可知,非线性控制分配方法精确地跟踪了三轴力矩指令,因此,在5°偏航角指令下,各状态量的响应效果均很好。但是,非线性分配方法由于算法复杂,其计算耗时比线性分配方法长(见表2)。

图8 增稳后的横航向响应曲线Fig.8 Lateral-directional responses on stability
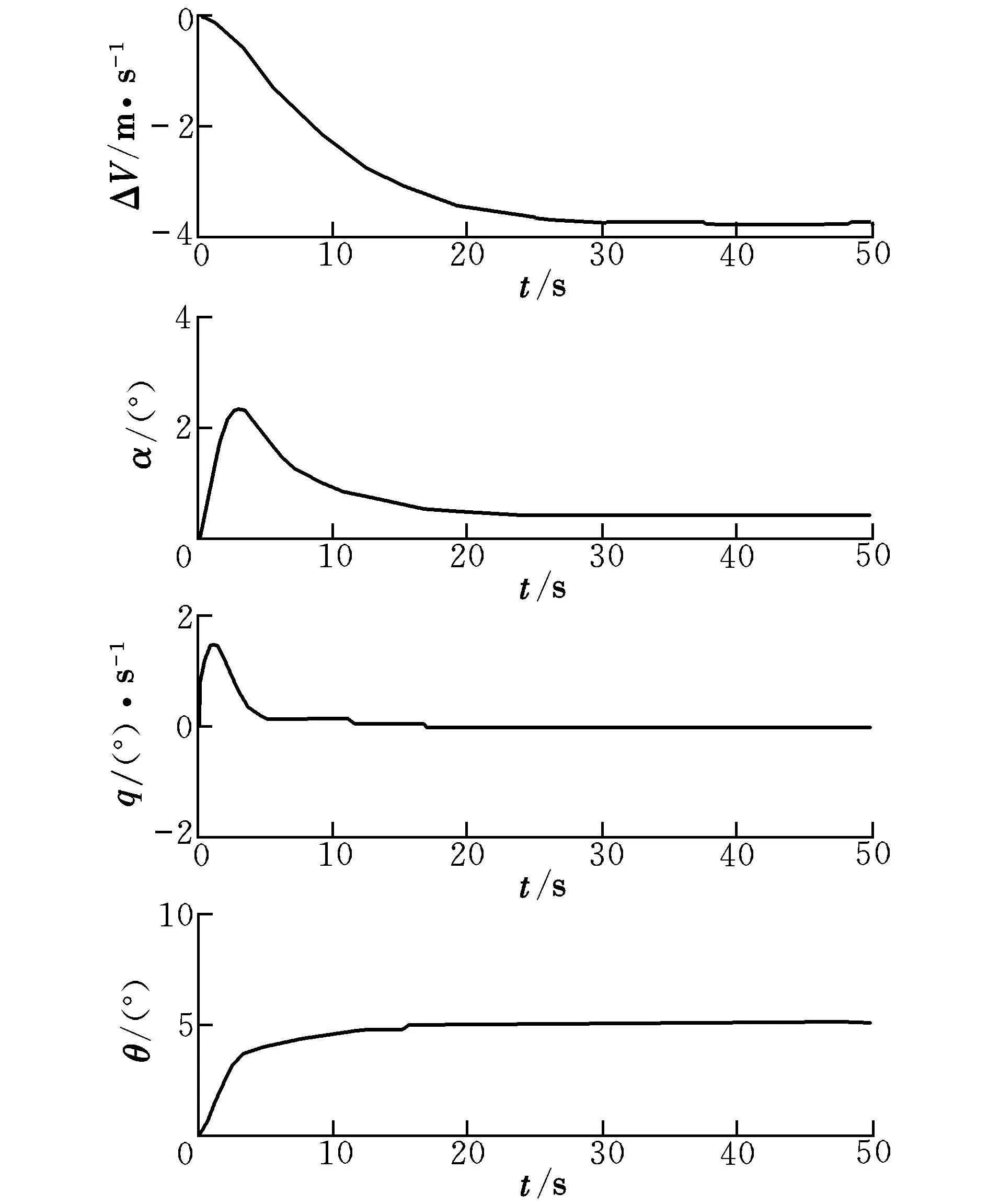
图9 SQP法的纵向响应曲线Fig.9 Longitudinal responses of SQP method


图10 SPQ法的横航向响应曲线Fig.10 Lateral-directional responses of SQP method

图11 SPQ法的虚拟舵指令跟踪曲线Fig.11Virtual rudder command tracking curves of SQP method

方 法仿真耗时/s线性不动点法 13.39非线性SQP法3025.69
5结论
(1)菱形翼布局无人机航向具有静不稳定的特点,但是通过设计相应控制增稳系统,可以实现较好的控制效果。
(2)菱形翼布局无人机阻力舵的偏航舵效非线性特性显著,采用线性的控制分配方法会带来明显的分配误差。其他舵面舵效具有明显的线性特性,非线性控制分配方法可以准确地跟踪指令,但具有计算耗时长的缺点。
(3)偏航舵效的非线性会影响航向增稳控制系统,进而影响指令的跟踪效果。根据舵效特性合理调整控制律参数,可以使控制系统具有足够的鲁棒性,以克服舵效非线性带来的影响。
参考文献:
[1]Martinez Juan,Flick Peter,Perdzock John,et al.An overview of sensor craft capabilities and key enabling technology[R].AIAA-2008-7185,2008.
[2]Bordignon K, Bessolo J.Control allocation for the X-35B[R].AIAA-2002-6020,2002.
[3]Scalera K R,Durham W C.A comparison of control allocation methods for the F-15 active research aircraft utilizing real-time piloted simulations[R].AIAA-99-4281,1999.
[4]王磊,王立新.飞翼布局无人作战飞机的控制分配方法[J].航空学报,2011,33(6):709-712.
[5]陈怀民,徐奎,马松辉,等.控制分配技术在无尾飞机纵向控制系统中的应用研究[J].西北工业大学学报,2007,25(2):199-203.
[6]马建军.过驱动系统控制分配理论及其应用[D].西安:西北工业大学,2008.
[7]王鹏.飞翼式高空长航时无人机轮式起降控制特性研究[D].西安:西北工业大学,2008.
(编辑:方春玲)
Research on control characteristics of diamond-wing UAV with multiple control surfaces
WANG Ya-long1,2, ZHU Xiao-ping2, ZHOU Zhou1,2, WANG Rui1,2
(1.School of Aeronautics, NWPU, Xi’an 710072, China;2.National Key Laboratory of Special Technology on UAV, NWPU,Xi’an 710065, China)
Abstract:Control surfaces of diamond-wing UAV can be taken full advantage of by control allocation. Moreover, the control reconfiguration won’t change the control law if the control surfaces fail. The basic control law was designed by PID control theory, the Linear control allocation law was designed by fix-point method and nonlinear control allocation law was designed by SQP method. At last, effect to the control system of the two methods was compared. The simulation shows that linear control allocation method causes tracking errors. However, by adjusting the control gain of the stability augumentation control system, the robustness of the control system is improved and the effect of the tracking errors is eliminated. Nonlinear control allocation method could track the virtual commands precisely. However, it takes more time to accomplish the simulation.
Key words:diamond-wing UAV; control allocation; fix-point method; SQP method
中图分类号:V212.1; V279
文献标识码:A
文章编号:1002-0853(2016)02-0005-05
作者简介:王亚龙(1991-),男,陕西凤翔人,硕士研究生,研究方向为飞行动力学与控制;周洲(1966-),女,湖南长沙人,教授,博士生导师,研究方向为无人机总体设计。
基金项目:国家自然科学基金资助(11202162)
收稿日期:2015-06-10;
修订日期:2015-11-16; 网络出版时间:2016-01-10 14:13
