基于动态逆-滑模的高速飞行器控制器设计
2016-05-23李飞李新国
李飞, 李新国
(西北工业大学 航天飞行动力学技术国家重点实验室, 陕西 西安 710072)
基于动态逆-滑模的高速飞行器控制器设计
李飞, 李新国
(西北工业大学 航天飞行动力学技术国家重点实验室, 陕西 西安 710072)
摘要:吸气式高超声速飞行器巡航状态下飞行环境复杂,建模时存在非线性以及参数摄动。基于小扰动假设的传统经典控制理论难以适应当前任务对鲁棒性的要求,对此提出了一种非线性动态逆-滑模控制律改进方法。通过对吸气式高超声速飞行器模型精确反馈线性化得到解耦形式的线性方程,为速度和高度设计出动态逆控制律来抵消非线性特性,在动态逆的基础上采用滑模变结构来补偿参数摄动带来的误差。仿真结果表明,所设计的控制方法具有良好的动态性能及鲁棒性。
关键词:非线性动态逆; 滑动模态变结构控制系统; 反馈线性化
0引言
目前,随着航天技术的不断创新与发展,高超声速飞行器成为各军事强国争相研究的焦点。高超声速飞行器飞行环境复杂,加之飞行器对飞行条件变化敏感,如果控制器设计不合理就会导致飞行过程发散,无法达到既定任务要求,因此有必要设计跟踪性能好、鲁棒性强的飞行控制系统。
传统的飞行器控制系统是建立在小扰动假设下的,难以适用于高度非线性以及具有参数摄动的高超声速飞行器飞行控制系统设计中。目前国内外学者的研究主要集中在非线性控制以及鲁棒控制方面。文献[1]采用自适应反步控制器对高超声速飞行器存在参数不确定的情况进行控制;文献[2]通过采用μ分析方法设计了高超声速飞行器鲁棒控制系统;文献[3]对非线性控制中神经网络法以及鲁棒自适应方法做了深入研究;文献[4]将高超声速飞行器耦合系统表示为具有非匹配不确定性关联大系统形式,利用Lyapunov稳定理论及Riccati方程设计滑模变结构控制律。
本文针对高超声速飞行器耦合控制以及参数摄动问题,提出了动态逆-滑模控制方法。采用动态逆将非线性形式转化为线性形式,线性化后的系统能够精确保留原系统的信息,在此基础上采用滑模控制抵消参数摄动带来的误差,充分结合了两种方法的优势。因此,较线性飞行控制系统而言,动态逆-滑模控制结构具有较强的控制精度及鲁棒性。最后在Matlab/Simulink中进行了数字仿真,针对某吸气式高超声速飞行器在巡航状态下对速度指令、高度指令的跟踪验证了控制器的性能。
1吸气式高超声速飞行器建模
1.1吸气式高超声速飞行器数学模型
假设地球为均匀圆球体,不考虑地球自转效应,且飞行器侧滑角为零,只考虑飞行器纵向运动。将发动机节流阀调节值与舵面偏转角作为控制量,则吸气式高超声速飞行器飞行动力学方程为[5]:

(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(0.001 2Ma2-0.054Ma+1)
(10)
其中,由迎角产生的力矩系数CM(α)、由俯仰角速度产生的力矩系数CM(q)和由舵偏角产生的力矩系数CM(δe)可由飞行器巡航状态下的经验公式得到:
CM(α)=10-4(0.06-e-Ma/3)×
(-6 565α2+6 875α+1)
(11)
(6.83α2+0.303α-0.23)
(12)
CM(δe)=0.029 2(δe-α)
(13)
发动机推力计算公式为:
T=0.5ρV2SCT
(14)
推力系数采用分段形式计算:
(15)
发动机动态方程采用二阶系统模型:
(16)
式中:δT为发动机节流阀调节值;δTcom为油门开度;在此可取k1=k2=0,k3=1。
1.2非线性动态逆原理
非线性动态逆通过输出或状态反馈,将非线性系统(全部或部分)转换为解耦规范系统——伪线性系统,采用线性系统设计理论设计控制系统达到设计要求。
考虑多输入-多输出系统(MIMO)为:

(17)
(18)
式中:G(x)=[g1(x),g2(x),…,gm(x)];f和gi(i=1,2,…,m)为光滑向量场;h为光滑函数。输出方程的李导数为:
(19)
(20)
因此输出方程可表示为:
(21)
引入反馈控制律:
u=-[G*(x)]-1f*(x)+[G*(x)]-1υ
(22)
式中:G*(x)为非奇异矩阵,加入积分环节来产生有定义的相对阶,本文在发动机节流阀控制中加入了积分环节确保相对阶完整定义;υ为新的输入控制量,因此可以设计υ得到非线性控制律u。将式(22)代入式(17)中得到解耦输出方程:
(23)
2输入输出线性化
高超声速飞行器在巡航状态下接收到控制指令后,发动机推力以及升降舵会作出响应,因此控制输入为发动机节流阀调节值δT和升降舵偏转角δe。为了简化推导过程,令:
(24)
分别对输出动态方程式(21)中的V微分3次,h微分4次,可得到关于控制量的表达式,因此输出方程表示为:
(25)
其中:
(26)
(27)
(28)
(29)
(30)
(31)
向量ω1,π1以及矩阵Ω2,Π2定义见文献[5]。
按式(22)设计控制律时,G*应为非奇异矩阵,即:
(32)
由式(32)可知,当航迹角γ≠90°且 (T+Lαcosα
+Dαsinα)≠0时,G*为非奇异的。
定义非线性坐标转换:
(33)
(34)
因此,解耦形式为:
(35)
(36)
其中:
(37)
(38)
3滑动模态变结构控制律设计
滑模变结构控制律设计的主要任务是设计适当的切换函数和变结构控制律,使系统状态轨迹能够在有限时间内到达所设计的滑模面上,并以适当的速度沿着它滑向平衡点。
针对系统式(35),引入状态反馈型滑模控制面s(x)=C1x(t),则简约型变结构控制系统为:
(39)
根据滑动模态定义,一旦系统状态x进入滑动模态域将只能沿其运动,且滑动运动满足:
(40)
将系统状态方程式(39)中第1式代入式(40)中,可得:
C1A1x+C1b1u=0
(41)
若C1b1非奇异,由上式可解出满足式(40)的等效控制,则在等效控制ueq的作用下,系统将沿着滑动模态运动。
(42)
在本文中为了消除抖振,引入饱和函数M1(s),则变结构控制律υ1的形式如下:
(43)
同理,可求得变结构控制律υ2的形式如下:
(44)
根据任务要求分别将滑动模态运动极点配置在{-0.5,-1+i,-1-i},{-0.25,-0.5,-1+i,-1-i}。 则式(43)、式(44)中滑动模态参数矩阵C1,C2以及饱和函数M1(s),M2(s)分别为:
(45)
C2=[0.251.753.632.751]
(46)
(47)
(48)


图1 动态逆-滑模控制结构图Fig.1 Dynamic inversion-sliding mode controller
4仿真分析
以某型吸气式高超声速飞行器为例,在Matlab/Simulink下进行仿真试验,验证所设计的动态逆-滑模控制结构的控制性能。初始仿真条件为:V=4 590 m/s,H=33 km,S=335 m2,α0=1.81°,分别在有、无初始扰动的情况下进行仿真分析。其中,加入初始扰动参数如表1所示。
采用第3节所设计的动态逆-滑模控制律,在巡航状态下给定阶跃响应:ΔV=100 m/s,ΔH=500 m,分别在有、无初始扰动的情况下进行对比,仿真结果如图2所示。
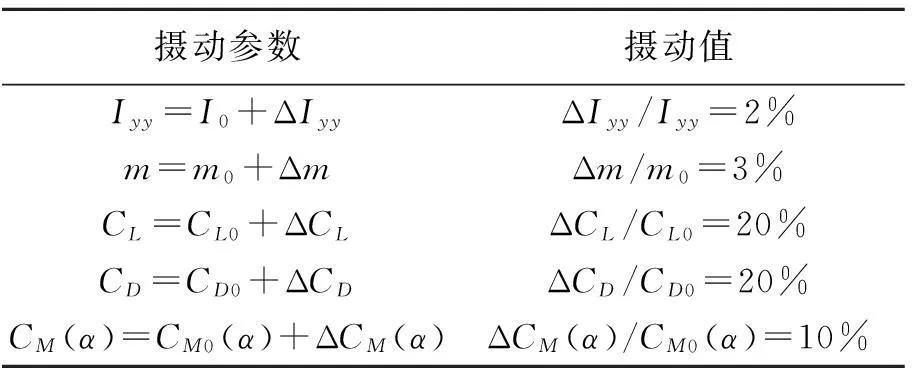
表1 扰动参数边界
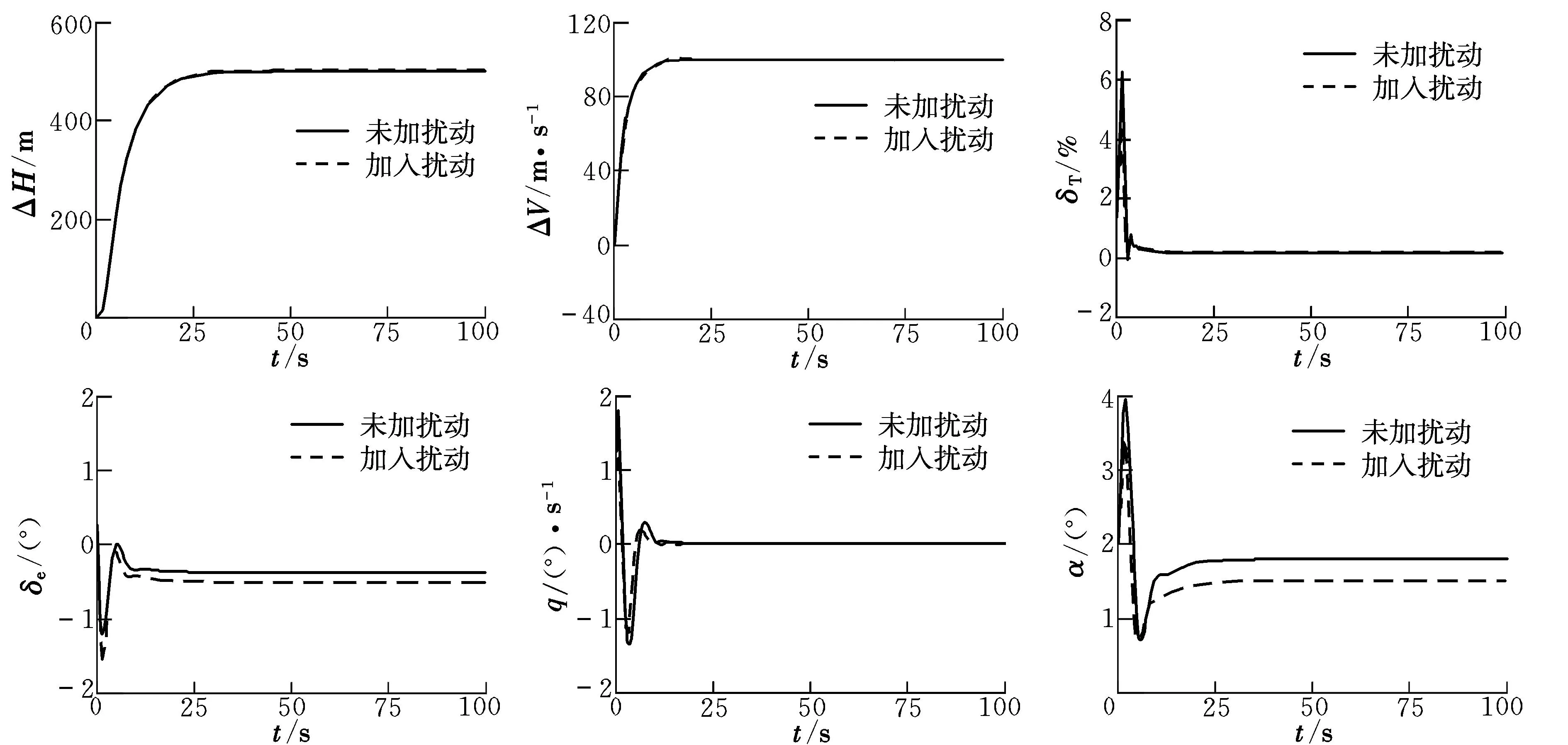
图2 仿真曲线Fig.2 Simulation curves
由图可知,所设计的动态逆-滑模控制律对于速度指令以及高度指令能够在较短时间内达到期望值并保持稳定,且当系统加入过程扰动时跟踪稳态误差小,鲁棒性强。发动机节流阀开度和舵面偏转角曲线变化平缓,但由于滑模变结构控制的固有特点导致存在一定的抖振。图中俯仰角速度迅速收敛为零,迎角曲线迅速收敛为小值,便于维持巡航状态。
在其他状态下,所设计的动态逆-滑模控制器响应曲线与前文所述相似,均能使系统具有良好的跟踪性能及鲁棒性,由于篇幅限制,在此就不一一列举。因此,所设计的动态逆-滑模变结构控制器能够使飞行器在巡航状态下抵御由于参数摄动对于系统的影响,具有良好的动态特性和鲁棒性。
5结束语
本文针对高超声速飞行器模型的特点,采用动态逆理论将高度非线性的高超声速飞行器纵向运动模型解耦,利用滑模控制律对参数摄动不敏感的特点,结合两者优势设计出了动态逆-滑模控制结构。通过仿真分析可知,此控制系统对某吸气式高超声速飞行器的控制指令能够做出快速响应,具有良好的跟踪性能且稳定性好、鲁棒性强,为工程应用提供了一种可行方案。
参考文献:
[1]朱艳明.高超声速飞行器的非线性控制[D].沈阳:东北大学,2009.
[2]尉建利,于云峰,闫杰.高超声速飞行器鲁棒控制方法研究[J].宇航学报,2008,29(5):1526-1530.
[3]Wu S F,Engelen C J H,Chu Q P.Fuzzy logic based attitude control of the spacecraft X-38 along a nominal re-entry trajectory[J].Control Engineering Practice,2001,9(7):699-707.
[4]周凤岐,王延,周军,等.高超声速飞行器耦合系统变结构控制设计[J].宇航学报,2011,32(1):66-71.
[5]Wang Q,Stengel R F.Robust nonlinear control of a hypersonic aircraft[J].Journal of Guidance,Control,and Dynamics,2000,23(4):577-585.
(编辑:方春玲)
Dynamic inversion-sliding mode for breathing hypersonic vehicle controller design
LI Fei, LI Xin-guo
(National Key Laboratory of Aerospace Flight Dynamics, NWPU, Xi’an 710072, China)
Abstract:Air-breathing hypersonic vehicle cruising flight environment is complex, non-linearity and parameter perturbation exists in modeling. Based on the assumption that it is difficult for small disturbance traditional classical control theory to adapt to the current task robustness requirements, this paper presents a nonlinear dynamic inversion-sliding mode control law improvement. Through the air-breathing hypersonic vehicle model to get precise feedback linearization decoupled linear equations, the dynamic inverse control law is designed for the speed and height to offset the non-linear characteristics. On the basis of dynamic inversion, the sliding mode variable structure is adopted to compensate parameter error caused by perturbation. The simulation results show that the control method is designed with good dynamic performance and robustness.
Key words:nonlinear dynamic inversion; sliding mode variable structure control system; feedback linearization
中图分类号:V448.2
文献标识码:A
文章编号:1002-0853(2016)02-0064-04
作者简介:李飞 (1990-),男,河北唐山人,硕士研究生,研究方向为飞行器制导与控制;李新国(1966-),男,湖南常德人,教授,博士生导师,研究方向为飞行器系统工程与仿真、空天飞行系统与技术。
收稿日期:2015-07-14;
修订日期:2015-11-03; 网络出版时间:2016-01-10 14:13
