基于模糊神经网络的农业电气PID控制参数优化
2016-05-23史德林
史德林
(江苏省现代农业装备工程中心,江苏句容 212400)
基于模糊神经网络的农业电气PID控制参数优化
史德林
(江苏省现代农业装备工程中心,江苏句容212400)
摘要:提出一种基于改进模糊神经网络PID控制的农业电气设备控制参数优化方法。设计了农业电气设备的系统结构模型,对农业电气设备的控制参量进行约束模型构建,得到控制目标函数,设计三层前向变结构PID神经网络,对农业电气PID控制参数进行自适应优化调节,设计了变结构的模糊神经网络PID控制器,实现对农业电气PID优化控制。仿真结果表明,采用该算法进行农业电气设备控制,其输出电压和电流等参数的稳定性和自整定性较好,功率增益较高,收敛性好,控制误差较少,提高了电气系统的稳定性和可靠性。
关键词:农业电气;PID控制;神经网络
Project Supported by Three Projects of Agricultural Machinery of Jiangsu Province(NJ2013-18).
农业电气设备通常处于高温高热高湿等恶劣的工作环境中进行播种和耕地作业。农业电气设备的组成部件构成复杂,主要由耕种作业控制器、电压控制逆变器、农机供电控制系统和电气机组电源等组成,农业电气设备的耦合因素较多,导致农业电气设备的故障发生率较高。农业电气机电设备是一种多变量、非线性、强耦合系统,在农业电气机电设备的运行过程中,受外电场环境和工作环境温湿度的干扰和影响,呈现一种时变非线性特征,出现迟滞控制、误差控制,影响农机设备工作的可靠性和稳定性。然而农业电气参数控制系统是整个农业电气机电设备电气控制的核心,是保证农业电气机电设备稳定运行的关键。研究农业电气参数控制模型的优化设计受到广大专家学者的关注[1]。
传统方法中,对农业电气控制方法主要有基于PID神经元自适应控制的农业电气机电控制系统、基于虚拟样机技术的农业电气机电控制模型、基于模糊控制理论的农业电气机电控制等[2-3]。其中,基于PID神经元自适应控制的农业电气机电控制系统具有典型性,然而传统的基于PID控制的农业电气机电控制系统采用BP神经网络控制方法进行农业电气设备控制,随着农业电气设备的输出参数多元化,导致控制参数出现谐振漂移,控制性能不好。对此,相关文献进行了改进设计。其中,文献[4]提出一种基于静止无功率补偿的农业电气机电控制参数优化设计方法,采用离散功率谱加权方法对农业电气机电设备控制过程中的谐振参数进行特征估计,并进行自动控制优化,提高了控制性能,但是该方法需要对参数进行多维空间重构,导致算法的计算开销较大;文献[5]提出一种基于线性分类器最优分割的农业电气PID控制参数优化方法,在特征空间中建构最优分割超平面,对农业电气PID控制参数进行离散聚类分析和状态自适应检测,提高了农业电气的控制精度,降低了电气设备的故障发生率,但是该方法对农业电气控制扰动性较大,不能自适应跟踪电气设备在温度变化下的参数控制误差,控制性能不好[6-7]。针对上述问题,本文提出基于改进模糊神经网络PID控制的农业电气设备控制参数优化方法。首先分析了农业电气设备的系统结构模型,对农业电气设备的控制参量进行约束模型构建,得到控制目标函数,基于传统的神经网络PID控制算法进行改进,设计了变结构的模糊神经网络PID控制器,实现对农业电气PID控制优化,仿真实验进行了性能验证,展示了本文算法在提高对农业电气控制性能、降低控制误差、提高农业电气设备的输出功率方面的优越性能,展示了较好的应用价值,得出有效性结论。
1 农业电气设备的系统结构和参数约束模型构建
1.1农业电气设备的系统结构
在研究农业电气设备的优化控制算法之前,首先给出农业电气设备的系统结构模型及控制原理,农业电气设备机组主要是由耕种作业控制器、电压控制逆变器、农机供电控制系统和电气机组电源等组成。其中,农业电气参数控制系统是整个农业电气设备控制的核心,农业电气设备机组的控制模板主要是采用模糊神经网络控制,控制系统包括了农业电气的电力电动机、中频发电机、DSP信息处理模块、DA数据转换模块和时钟频率发生器、直流变换器和人机交互系统组成。农业电气机组系统结构模块如图1所示。
构建农业电气机电设备农业电气控制系统的电机组结构模型,进行农业电气控制系统结构设计与控制性能分析,农业电气机电设备在运行中,选择转子速度与压力耦合的方式,保证农业电气的拖动电机具有较大的电气储能。农业电气机电设备的电力传动控制电路和驱动电路系统模块如图2所示。
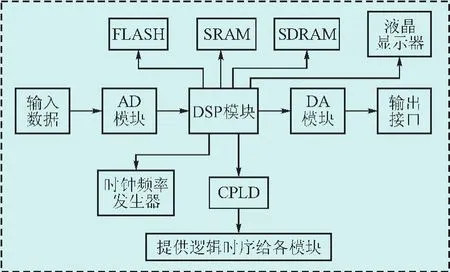
图1 农业电气机组系统结构模块Fig. 1 System structure module unit of agricultural electrical unit

图2 农业电气机电设备的电力传动控制电路模块Fig. 2 The power transmission control circuit model of the agricultural mechanical and electrical equipment
分析图2可知,农业电气机电设备感应电能采用分段式耦合传输,通过补偿电容与系统电感进行参量耦合,电压增益主要由负载和频率决定。假设农业电气设备电机组的目标电流为,机组的控制传感器电流误差为发电机带整流谐振角为ω0,电流有效值Ir,通过对电机转子进行参数耦合控制,农业电气机电设备的电力传动控制系统用外部电源给整个系统供+5 V和±12 V的电压,控制系统中,双向逆变稳压补偿器输出电压为3.3 V和1.6 V,三端滤波DSS306的外部电阻由负载Ro上电流比值来确定,则输出电压方程为:

采用PID控制方式,得到农业电气机组的最优控制状态下电流矢量数据的信号形式为:

农业电气设备的辐射场的磁损耗函数为:

式中:θ为额绕组气隙面积;K为农机电气设备在转子轴心的传输功率;R为农机电气设备输入电源的磁电模值;为转子铁芯磁阻;e为农业电气机电控制模型的有功损耗。通过上述分析,得到了电气设备的系统结构模型,在此基础上进行参数控制优化设计。
1.2控制参数约束模型和特征分析
在上述进行农业电气系统结构描述的基础上,分析农业电气控制参数模型,为农业电气控制优化控制提供数据模型基础。则当导线的有效利用面积减小时,农业电气系统的控制端初级侧和次级侧的有效阻抗可以表示为:
式中:ω=2πf,表示农业电气控制的相位角度;N为农业电气机组结构的输入功率;deff为电磁耦合分布强度;p为电容的阻抗值;ψ为负载强度;Str为涡流损耗;L为电气控制系统的电感;T为环境温度。
在农业电气系统进行作业过程中,存在线圈损耗、整流损耗、开关损耗,需要采用电容进行交流耦合,实现对损耗的抑制,采用光电倍增管电容进行交流耦合的示意图如图3所示。

图3 光电倍增管电容进行交流耦合损耗抑制Fig. 3 AC coupling loss suppression of the photomultiplier tube capacitor

式中:RIGBT为农业电气设备的补偿电容;Rs为阻抗;Rcs为电阻Req的负载;Rcp为功率因数;Rp为自感。采用3D有限元方法计算漏感,在谐振条件下,农业电气设备的补偿电容的值取决于漏感和工作频率,由损耗可以计算出效率:

为了增加系统兼容性和降低风险,在农业电气控制系统设计中,由于系统的交流耦合谐振影响到PID控制系统功率因数和输出功率,需要采用PID参数优化方法进行整流和滤波,得到整流滤波后的农业电气控制系统的输出功率损耗为:式中:Ploss为农业电气设备的输出功率损耗,通过上述分析,得到控制参数约束模型,描述如下:

式中:φa、ψa、γ为农业电气设备转子叶片磁偶极子;为农业电气设备在不同状态运行下的磁场矢量;为耦合漏磁系数;b1、b2、b3、d3为模型的已知系数;Δb1、Δb2、Δb3、Δd3为未确定系数;fd1、fd2、fd3为电气设备控制的干扰项;δφ、δψ、δγ为控制输入。基于上述控制参数约束模型构建,对农业电气设备进行模糊神经网络控制,优化控制参数,提高控制性能。
2 基于模糊神经网络的农业电气PID控制优化算法
在上述进行系统设计和控制参数约束模型构建的基础上,进行农业电气PID控制优化设计,传统方法采用BP神经网络控制方法进行农业电气设备控制,随着农业电气设备的输出参数多元化,导致控制参数出现谐振漂移,控制性能不好。为了克服传统方法的弊端,本文提出一种基于改进模糊神经网络PID控制的农业电气设备控制参数优化方法。基于模糊神经网络控制原理,设计三层前向变结构PID神经网络,提高农业电气设备转速调节的控制性能。PID变结构网络分为输入层、隐含层和输出层,变结构的PID神经网络结构模型如图4所示。

图4 变结构PID神经网络结构模型Fig. 4 Structure model of the variable structure PID neural network
图4所示的农业电气控制PID神经网络系统成为SPIDNN,农业电气控制系统设计中,选取SPIDNN作为学习网络,三层前向神经元为2×3×1结构,基于上述基本系统结构模型,进行控制参数优化设计,在农业电气控制系统发电机相电压一定的前提下,固定输入层至隐含层的权值ωij(i=1,2;j=1,2,3),在任意时刻t,对于农业电气机电设备的敏感元件,采用模糊控制补偿方法,得到第j个神经元的输出量为x1,x2,…,xn,考虑系统的不确定因素,采用自适应加权算法,对农业电气设备的控制函数分为确定和不确定两部分,分别乘上权重值w1j,w2j,…,wnj后,得到模糊神经元在状态uj的输出状态参量为:

当不考虑系统的不确定因素时,得到:

通过PID变结构控制,农业电气设备的低速轴的总输入netj等于与其相连的各支路输出量分x1,x2,…,xn的总和,对网络输入新的训练向量:

在PID神经控制系统中,考虑农业电气设备控制过程中温度造成的热误差,得到隐含层的参数补偿项为:

对农业电气机电设备的输出功率增益进行自适应调节,固定输入层至隐含层的权值ωij(i=1,2;j= 1,2,3),则

令:


式中:两相换流差分电压为ΔV。通过上述改进的变结构PID模糊神经网络控制,对式(10)的控制函数进行优化,基于改进的模糊神经网络PID控制的农业电气控制函数为


式中:b>0,φa为磁损耗;为电机的转动速度;u为输入量;fd为外加的控制系统干扰信号。由此可见,采用本文方法进行控制算法改进,可以有效降低控制误差。
3 仿真实验与结果分析
为了测试本文设计的改进算法在农业电气设备优化参数控制中的性能,需要进行仿真实验。仿真建立在Matlab Simulink软件基础上,仿真实验的计算机配置环境为:Lenovo KM400[8-9],处理器为AMD Athlon 1.83 GHz,2 G内存,农业电气PID控制参数:Np=Ns=20,f=20.5 kHz,Cp=Cs=0.57 μF。农业电气机电设备的农业电气控制系统中,使用24 V、7.2 Ah的光伏电池作为主供电电源,转子模型线圈距离100 mm,输入电压24 V。农业电气机电设备的转子电阻Rr=0.740 2 Ω,最大电能利用率为0.34,额定功率为2 000 kW。在上述参数设计的基础上,进行农业电气设备控制参数优化,得到优化的参数结果见表1。
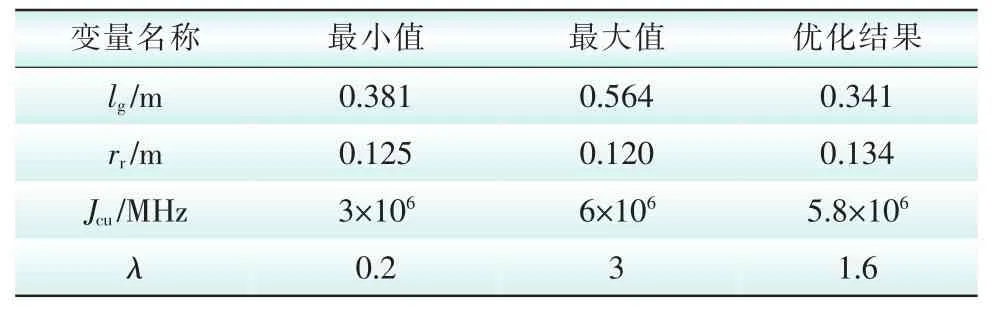
表1 参数设计及优化结果Tab. 1 The design and optimization results
根据上述参数设计,在农业电气设备功率损耗固定的情况下,进行模糊PID控制仿真,得到输出电气设备输出的电流和电压如图5所示。
从图5可见,采用本文控制方法实现对农业电气的PID控制参数优化后,输出的电压和电流等参数的稳定性和自整定性较好,功率增益较高,为了对比本算法的性能,采用本文算法和传统算法,以农业电气设备的参量输出稳定性为测试指标,得到仿真结果如图6所示。

图5 电气设备控制系统的电流和电压输出Fig. 5 The current and voltage output of the electrical equipment control system
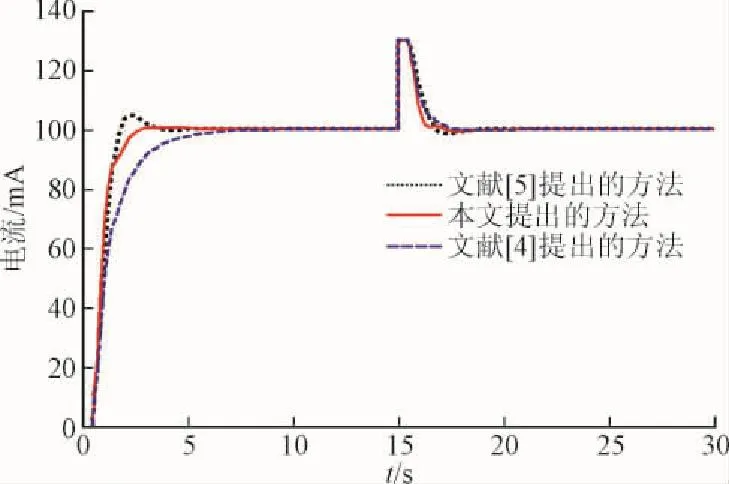
图6 农业电气设备的控制参量输出Fig. 6 The controlling parameter outputs of the agricultural electrical equipment
从图6可见,采用本文算法可获得平稳的农业电气设备振荡幅度控制输出,克服了传统方法谐振失真的缺陷,随着农业电气设备运行时间的增大和电场频率的增大,农业电气设备的控制输出区域稳定,误差减小,收敛性较好,仿真结果展示了本文算法在实现农业电气PID控制参数优化后的电气控制性能。
4 结语
农业电气机电设备是一种多变量、非线性、强耦合系统,在农业电气机电设备的运行过程中,受外电场环境和工作环境温湿度的干扰和影响下,呈现一种时变非线性特征,出现迟滞控制、误差控制,影响对农机设备工作的可靠性和稳定性。农业电气参数控制系统是整个农业电气机电设备电气控制的核心,是保证农业电气机电设备稳定运行的关键。本文提出一种基于改进模糊神经网络PID控制的农业电气设备控制参数优化方法。首先分析了农业电气设备的系统结构模型,对农业电气设备的控制参量进行约束模型构建,得到控制目标函数,基于传统的神经网络PID控制算法进行改进,设计了变结构的模糊神经网络PID控制器,实现对农业电气PID控制优化。仿真结果表明,采用该算法进行农业电气设备控制的性能较好,输出的电压和电流等参数的稳定性和自整定性较好,功率增益较高,收敛性和控制精度都得到了较大的提高。
参考文献
[1]甄建军,张毅.基于螺旋平面线圈的感应电能传输技术研究[J].电气自动化,2014,36(2): 78-80. ZHEN Jianjun,ZHANG Yi. Research on inductive power transmission technology based on spiral planar coil[J]. Electrical Automation,2014,4(2): 78-80(in Chinese).
[2]赵石磊,郭红,刘宇鹏.基于轨迹跟踪的线性时滞系统容错控制[J].信息与控制,2015,44(4): 469-473. ZHAO Shilei,GUO Hong,LIU Yupeng. Fault tolerant control for linear time-delay system based on trajectory tracking[J]. Information and Control,2015,44(4): 469-473(in Chinese).
[3] MCGINNIS T,HENZE C P,CONROY K. Inductive power system for autonomous underwater vehicles[C]// in 2007 Oceans,2007,Vancouver,2007,1-5: 736-740.
[4] YOSHIOKA D,SAKAMOTO H,ISHIHARA Y,et al. Power feeding and data-transmission system using magnetic coupling for an ocean observation mooring buoy[J]. IEEE Transactions on Magnetics,2007,43(6): 2663 -2665.
[5] LIN Jie,LI Xingfei,LI Haifeng,et al.Construction of contactless power feeding system for ocean buoy[C]// In WiCOM,2011 7th International Conference,2011: 1-4.
[6]刘彦呈,任俊杰,王宁,等.永磁同步电机旋转坐标系滑模观测器设计研究[J].电机与控制学报,2015,19 (7): 36-44. LIU Yancheng,REN Junjie,WANG Ning,et al. Research of sliding mode observer for permanent magnet synchronous motor based on the synchronous rotating frame[J]. Electric Machines and Control,2015,12(7): 36-44(in Chinese).
[7]田永红.引入混沌差分控制理论的温度控制器设计[J].科技通报,2014,30(6): 47-51. TIAN Yonghong. Design of temperature controller under
chaos differential control theory[J]. Bulletin of Science and Technology,2014,30(6):47-51(in Chinese).
[8]满超楠,杨帅峥,周琳,等.基于保护间隙的配电网差异性综合防雷保护[J].电瓷避雷器,2013,1(136): 64-67; MAN Chaonan,YANG Shuaizheng,ZHOU Lin,et al. The otherness integrated lightning protection of the power distribution network based on protection gap[J]. Insulators and Surge Arresters,2013,1(136): 64-67(in Chinese).
[9]行鹏,朱宜东,林国生,等.基于PLC和工控机的冲击绝缘耐受试验控制系统[J].高压电器,2012(1): 105-109. XING Peng,ZHU Yidong,LIN Guosheng,et al. Control system of impulse insulation withstand test based on PLC and IPC[J]. High Voltage Apparatus,2012(1): 105-109 (in Chinese).
史德林(1980—),男,硕士,讲师,主要研究方向为农业工程、物联网。
(编辑冯露)
Optimization of Agricultural Electrical PID Control Parameters Based on Fuzzy Neural Network
SHI Delin
(Jiangsu Modern Agricultural Equipment Engineering Center,Jurong 212400,Jiangsu,China)
ABSTRACT:In this paper an improved fuzzy neural network PID control method for agricultural electrical equipment control parameters is proposed. The system structure model of the agricultural electrical equipment is designed and the control parameters are set up and the control objective function is obtained. The PID neural network is designed with the PID control parameters adjusted and the fuzzy neural network PID controller is designed to realize the PID optimized control of the agricultural electrical equipment. The simulation results show that the with this algorithm to control the agricultural electrical equipment,the stability and self-adjusting of the output voltage and current are better with higher power gain,better convergence and less control errors and the stability and reliability of the electrical system are improved.
KEY WORDS:agricultural electrical;PID control;neural network
作者简介:
收稿日期:2015-09-21。
基金项目:江苏省农机三项工程项目(NJ2013-18)。
文章编号:1674- 3814(2016)03- 0040- 05
中图分类号:TP183
文献标志码:A
