激光陀螺惯组系统级标定方法
2016-05-19孙伟强张礼伟
孙伟强,张礼伟,熊 崴,陈 刚,曲 宁
(1.天津航海仪器研究所,天津 300131;2.海军驻天津航海仪器研究所军事代表室,天津 300131)
激光陀螺惯组系统级标定方法
孙伟强1,张礼伟2,熊 崴1,陈 刚1,曲 宁1
(1.天津航海仪器研究所,天津 300131;2.海军驻天津航海仪器研究所军事代表室,天津 300131)
针对激光陀螺惯性测量组件在传统的分立式标定中受橡胶减震器影响的问题,从系统的角度对激光陀螺惯性测量组件的标度因数误差、安装误差传播规律进行分析。通过分别绕三只陀螺敏感轴转动激发激光陀螺的标度因数误差、安装误差,通过三只加速度计敏感轴分别指天激发加速度计的标度因数误差、安装误差和零位,从而完成激光陀螺惯性测量组件的系统级标定。在未进行温控及温补的情况下,陀螺仪标度因数误差重复性在3.5×10-6以内,安装误差重复性在3″以内,加速度计标度因数误差和零位在其性能指标内,安装误差在4.5″以内。试验结果表明,该方法满足高精度、长期稳定性好的惯导系统工程应用要求。
捷联惯性导航系统;机抖激光陀螺;惯性测量组件;系统级标定;卡尔曼滤波
惯性组件是惯性导航设备的核心设备,以激光陀螺为核心的激光陀螺惯性测量组件是目前最常用的高精度惯性测量设备。由于其直接固连于载体,感测载体角运动和线运动,如果惯性元件的安装误差、标度误差较大,则会引起较大的系统误差,因此对激光陀螺惯性测量组件进行精确标定必不可少。
传统的标定方法是利用高精度三轴转台,进行速率试验来标定陀螺仪的标度因数和安装误差,进行位置试验来标定加速度计标度因数、安装误差和零位以及陀螺仪的零偏。由于机抖激光陀螺中引入了橡胶减震器,使惯性测量组件在翻转过程中存在变形,用传统的分立式标定方法,标定精度受到限制[1-3]。有多位学者从系统级角度出发,研究了系统级或在线对系统进行标定的方法[4-7],但之前的研究很少有对系统级标定的转位次序和参考坐标系建立的描述,而转位次序对于系统的可观测性具有重要意义[8-9]。本文从如何激发激光陀螺惯性测量组件误差对系统导航参数影响的角度出发,分析转位过程中标度误差、安装误差传播规律,设计合理的转位顺序和适用于激光陀螺惯性测量组件的卡尔曼滤波器,建立了以陀螺为参考系的系统级标定方法,研究双轴位置转台条件下激光陀螺惯组系统级标定方法。
1 激光陀螺惯性测量组件误差传播规律分析
1.1 误差模型
捷联式系统误差模型如下:


激光陀螺惯性测量组件误差模型如下:

1.2 激光陀螺测量组件误差激发过程分析
仅由陀螺误差引起的姿态误差方程如下:

为分析方便,假设初始时刻载体坐标系与导航坐标系重合,即

若绕y陀螺敏感轴即横摇轴进行旋转,转动角度为180°,则有:

标定时采用的转速ω约为15 (°)/s,地球自转分量的量级earthω 约为10 (°)/h,由于相对于标定采用的转速,地球自转分量可以忽略不计,则有:

展开得:

对上面各式进行积分可得:

即绕y陀螺敏感轴转动180°,陀螺安装误差、标度因数误差引起的姿态误差为
绕z陀螺敏感轴即绕方位轴转过180°,同样得忽略地球自转的影响,有:

展开得:

对上面各式进行积分可得:

即绕z陀螺敏感轴转动180°,陀螺安装误差、标度因数误差引起的姿态误差为

绕方位轴转动90°,则x陀螺敏感轴指向横摇轴,此时绕x陀螺敏感轴转动,则有:


展开得:

对式(19)各项进行积分,得:

即绕x陀螺敏感轴转动180°,陀螺安装误差、标度因数误差引起的姿态误差为

从式(12)(16)(21)可以看出,通过分别绕三个陀螺仪敏感轴旋转均可以激发出标度因数误差和三个安装误差,且相互之间没有耦合,据此可以设计出适用于系统级标定的转位次序。陀螺仪常值误差可以通过使各个陀螺敏感轴分别指向北向,利用卡尔曼滤波器将其估计出来。
1.3 加速度计测量组件误差激发过程分析
对于加速度计,有:

为分析方便,假设初始时刻载体坐标系与导航坐标系重合,此时 z加速度计敏感轴指天,则有


绕方位轴转过90°,再绕横摇轴转过90°,此时y加速度计敏感轴指天,则有:

式(23)(25)和(27)表明了加速度计各项误差的激发情况,由于加速度计零位是不随敏感加速度量的变化而变化的,因此可以据此在各式的基础上旋转180°,来估计加速度计零位,由此可以将加速度计的各项误差均估计出来。
2 系统级标定方案设计
以式(1)~式(5)为系统误差模型建立 27维卡尔曼滤波器,对惯性测量组件各项误差进行标定,系统状态矢量如式(28),卡尔曼滤波器方程如式(29)~(33)[10]。
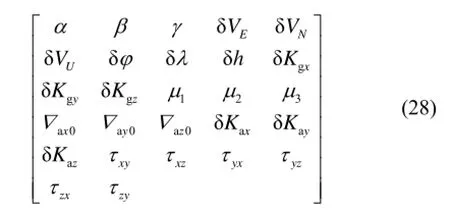
式(28)中各量的具体含义参见第2节。
状态一步预测:

一步预测误差方差阵:

滤波增益矩阵:

估计误差方差阵:

状态估计:

表1给出了系统级标定过程中转台的转动次序及每次转动的角增量。

表1 陀螺仪系统级标定次序Tab.1 Sequence of gyro systematic calibration
3 标定试验
利用三只高精度陀螺仪构成的惯性测量组件和转台,进行了系统级标定试验。标定过程中,陀螺仪和加速度计的标度因数采用粗略计算出来的值,陀螺仪和加速度计的安装误差设为 0,陀螺仪和加速度计的常值漂移误差设为 0,按照设定的转位次序进行旋转激发各项误差,采集陀螺仪和加速度计数据进行卡尔曼滤波,对各项误差进行估计。由于陀螺仪零偏误差需要做长时间测漂估计,受时间限制本次试验未做,加速度计标度因数受温度影响较大,而本次试验未做温度控制和温度补偿。在未进行温控及温补的情况下,陀螺仪标度因数误差重复性在3.5×10-6以内,安装误差重复性在3″以内,加速度计标度因数误差和零位在其性能指标内,安装误差在4.5″以内。图1~图3给出了某次试验各项误差收敛曲线。

图1 陀螺仪标定结果Fig.1 Calibration results of gyro

图2 加速度计标度因数标定结果Fig.2 Calibration results of acc scale


图3 加速度计安装误差标定结果Fig.3 Calibration results of acc misalignment
4 结 论
本文从系统的角度对激光陀螺惯性测量组件的标度因数误差、安装误差的传播规律进行分析,通过分别绕三只陀螺敏感轴转动激发激光陀螺的标度因数误差、安装误差,通过三只加速度计敏感轴分别指天激发加速度计的标度因数误差、安装误差和零位,从而完成激光陀螺惯性测量组件的系统级标定。试验结果表明,该方法具有一定的工程应用价值。
(References):
[1] 吴文启, 张岩, 张晓强, 等. 激光陀螺接连惯导系统参数稳定性与外场自标定[J]. 中国惯性技术学报, 2011, 19(1): 11-15.
Wu Wen-qi, Zhang Yan, Zhang Xiao-qiang, et al. Parameter stability and outfield self-calibration of RLG-SINS [J]. Journal of Chinese Inertial Technology, 2011, 19(1): 11-15.
[2] 杨晓霞, 孟浩然, 王帅. 激光捷联惯导系统的外场动态标定方法[J]. 中国惯性技术学报, 2011, 19(4): 393-398.
Yang Xiao-xia, Meng Hao-ran, Wang Shuai. Calibration method for laser gyro SINS under outer field dynamic conditions[J]. Journal of Chinese Inertial Technology, 2011, 19(4): 393-398.
[3] 魏国. 二频机抖激光陀螺双轴旋转惯性导航系统若干关键技术研究[D]. 国防科技大学硕士学位论文, 2013.
Wei Guo. Research on some key technologies for dualaxis rotation inertial navigation system with mechanically dithered ring laser gyroscope[D]. Ph.D Thesis of National University of Defense Technology, Changsha, China, 2013.
[4] 陆志东, 王晓斌. 系统级双轴旋转调制捷联惯导误差
分析及标定[J]. 中国惯性技术学报, 2010, 18(2): 135-141. Lu Zhi-dong, Wang Xiao-bin. Error analysis and calibration of systematic dual-axis rotation modulating SINS[J]. Journal of Chinese Inertial Technology, 2010, 18(2): 135-141.
[5] Xiong Zhi, Peng Hui, Liu Jian-ye, et al. Online calibration research on the lever arm effect for the hypersonic vehicle[C]//Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium: 1213-1218.
[6] Jørgensen M J, Paccagnan D, Poulsen N K. IMU calibration and validation in a factory, remote on land and at sea[C]//Proceedings of the 2014 IEEE/ION Position, Location and Navigation Symposium: 1384-1391.
[7] 黄凤荣, 侯斌, 孙伟强, 等. 双轴旋转式 SINS自主标定技术[J]. 中国惯性技术学报, 2012, 20(2): 146-151.
Huang Feng-rong, Hou Bin, Sun Wei-qiang, et al. Selfcalibration for dual-axis rotary SINS[J]. Journal of Chinese Inertial Technology, 2012, 20(2): 146-151.
[8] Chang Guo-bin, Xu Jian-ning, Li An, et al. Error analysis and simulation of the dual-axis rotation-dwell auto compensating strap-down navigation system[C]//2010 International Conference on Measuring Technology and Techtronic Automation. 2010: 124-127.
[9] Goshen-Meskin D, Bar-Itzack L Y. Observability analysis of piece-wise constant systems with application to inertial navigation[C]//Proceedings of the 28th Conference on Decision and Control. Honolulu, Hawail, 1990.
[10] Shin Eun-Hwan. Estimation techniques for low-cost inertial navigation[R]. The University of Calgary, 2005.
Systematic calibration method for RLG inertial measurement unit
SUN Wei-qiang1, ZHANG Li-wei2, XIONG Wei1, CHEN Gang1, QU Ning1
(1. Tianjin Navigation Instrument Research Institute, Tianjin 300131, China; 2. Navy Army Military Representative Department in Tianjin Navigation Instrument Research Institute, Tianjin 300074, China)
To avoid the distortion of the elastic isolation of the IMU in traditional calibration method, the transmission rule of the scale factor and installation error in SINS was analyzed. Each of the gyro’s three sensitive axes was rotated to separately excite the scale error and fix error, and the accelerometer axis was pointed up and down to separately excite the scale error, misalignment and bias to realize the systematic calibration of laser gyro inertial measurement units. The experiment results show that, when without temperature compensation and control, the gyro’s scale factor error repeatability is within 3.5×10-6, the gyro’s misalignment repeatability is within 3″, the accelerometer’s misalignment is within 4.5″, and the accelerometer’s scale factor and biases are all within the performance specifications, which show that the proposed calibration method meets the engineering requirements of long-time and high-accuracy inertial navigation system.
SINS; dithered ring laser gyro; inertial measurement unit; systematic calibration; Kalman filter
U666.1
A
1005-6734(2016)01-0009-05
10.13695/j.cnki.12-1222/o3.2016.01.003
2015-09-05;
2015-11-29
船舶预研支撑技术基金(14J3.9.4)
孙伟强(1984—),男,工学硕士,高工,主要从事捷联式惯性导航系统研究。E-mail: sunwq1984@163.com
