两种多天线GNSS定姿方法的精度分析
2016-05-19张方照柴艳菊丁磊香
张方照,柴艳菊,柴 华,丁磊香
(1.中国科学院测量与地球物理研究所 大地测量与地球动力学国家重点实验室,武汉 430077;2.中国科学院大学,北京 100049)
两种多天线GNSS定姿方法的精度分析
张方照1,2,柴艳菊1,柴 华1,丁磊香1,2
(1.中国科学院测量与地球物理研究所 大地测量与地球动力学国家重点实验室,武汉 430077;2.中国科学院大学,北京 100049)
基于高精度多天线GNSS基线分量及精度估计结果,实现了两种常用的多天线定姿方法:直接姿态法和最小二乘姿态法。利用一套车载三天线GNSS实测数据和高精度惯性导航系统(陀螺漂移0.005 (°)/h,加速度计零偏优于10-3g)输出的姿态结果,深入分析了两种定姿方法的内、外符合精度。实验结果表明:两种定姿所解算的航向角、俯仰角和横滚角的精度分别为:直接法的内符合精度约为0.3°~0.5°、0.3°~1.0°、0.5°~1.0°,最小二乘法约为0.1°、0.2°~0.5°、0.5°~2.0°,即最小二乘法对航向角估计有明显改善,对俯仰角和横滚角改善不明显;两种方法的姿态外符合精度(消除航向系统偏差)基本一致,约为0.08°、0.15°、0.42°,但是最小二乘法得到的航向角系统偏差更小。
GNSS多天线测姿;直接姿态法;最小二乘姿态法;姿态精度
运动载体的姿态信息在军事和民用领域显得日益重要,已成为航空、航天等的重要导航信息[1]。随着新技术的发展与革新,对姿态精度的要求越来越高。例如,航空重力、航空摄影等高精度测量技术需要达到事后分级甚至秒级姿态精度,航海等领域一般要达到分级实时姿态精度。与传统的高精度惯性导航系统(INS)及GNSS/INS组合系统相比,GNSS(Global Navigation Satellite System)姿态测量系统是利用多个天线的载波相位基线解算结果来确定载体的航向和姿态,具有无姿态漂移误差,不受重力影响,体积小,成本低和易于固化等优点,且能对姿态精度进行评估,已成为导航及组合导航领域的研究热点[2]。
近年来,一些学者对此进行了大量研究,提出了一些相关算法,其中最常用的有直接姿态解算法和最小二乘姿态解算法[3-5,13-19]。GNSS测姿精度与天线布局、基线长度和精度、天线数量等有关[6]。天线数量越多,天线布设越均匀,基线越长,姿态解算精度就越高[4,20]。由于载体范围的限制,天线布设很难满足理想的条件,因此,在有限的条件下,提高基线解算精度,寻找最优的姿态解算方法及对姿态精度进行合理评估是关键。
本文详细推导两种姿态解算方法精度估计模型,并以高精度INS的姿态结果作为基准,对两种方法的定姿结果进行了外符合精度分析。本文的研究结果对运动载体的姿态精度评估具有一定的参考价值。
1 坐标系和坐标转换
多天线姿态解算是利用载体坐标系(body frame system,b系)和当地水平坐标系(地理坐标系)(Local Level System,L系)之间的转换关系来实现的[7]。
当地水平坐标系(L系):当地水平坐标系又称为地理坐标系,原点位于主天线(天线1)的相位中心,Y轴指向当地北子午线,X轴垂直于Y轴指向东,Z轴与X、Y轴构成右手坐标系[7-10]。
载体坐标系(b系):原点位于主天线(天线1)的相位中心;Y轴指向1、2天线的连线方向;X轴在3个天线形成的平面内,且与Y轴垂直,指向载体的右侧;Z轴与X、Y轴构成右手坐标系[7-10]。
当天线1、2形成的基线方向与载体平台坐标系主轴(Y轴)一致时,天线坐标系又称为载体坐标系。3个天线形成的载体坐标系和各天线的坐标表示如图1所示,其中12b⇀、13b⇀表示在载体系中的基线矢量,α为两基线的夹角,12b和13b表示基线长度。
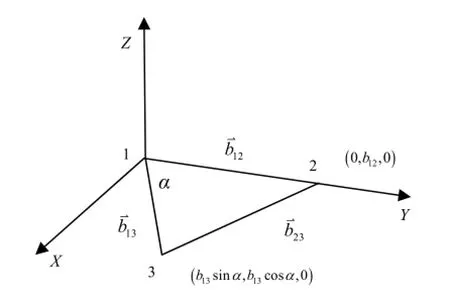
图 1 载体坐标系Fig.1 Coordinate system of carrier body
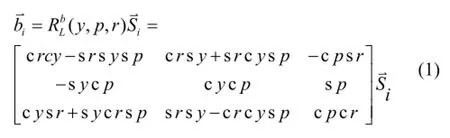
坐标系转换:由于b系与L系的原点重合,L系可以通过三次旋转得到相应的载体坐标系,三次旋转分别是绕Z轴旋转角度y(航向角),绕X轴旋转角度p(俯仰角),绕Y轴旋转角度r(横滚角)。其转换关系为[4,11]
2 姿态解算及内精度估计模型
假设在载体上布设n个GNSS天线,1号天线作为主天线,与其它天线形成不共线的n-1条基线( 3n≥ )。
2.1 直接姿态解算及内精度估计模型
假设利用1、2和3号天线,安装位置如图1所示。利用GNSS观测数据解算的当地水平坐标系中的基线向量分别为

根据姿态角的定义,求得航向角和俯仰角。
航向角y:

俯仰角p:

则横滚角r为
2.2 直接法姿态角中误差估计模型
对式(2)进行微分,得:
根据误差传播律,忽略坐标分量之间的相关性,则航向角的中误差yσ 为[4,9,11]
同理,俯仰角p和横滚角r的中误差pσ、rσ分别为



式中,式(7)~(9)中:等式右侧的符号S为基线长度,下标为基线标识;σ表示中误差估值,相应下标为对应的基线分量,该量可以从GNSS定位模型中得到。
分析式(7)~(9)可知:航向角和俯仰角精度主要由基线12S⇀决定,横滚角精度由基线13S⇀及其和基线12S⇀的夹角α决定;当两条基线垂直时,横滚角中误差最小。
2.2.1 最小二乘姿态解算及内精度估计模型
利用主天线和其它天线形成的载体系和当地水平系中的n-1条基线,根据坐标系转换可得:


为姿态角改正数,即待估参数;为观测值的权阵。
其中,Ai=为第i条基线对应
p、 r为由直接法计算的初始姿态角[4,12]。
利用最小二乘法可得姿态改正数估计为
0

则最小二乘姿态角估值为

2.2.2 最小二乘姿态角中误差估计模型

分析2.1节和2.2节的姿态及中误差估计模型可知,最小二乘姿态法理论上优于直接姿态解法,因为它利用所有天线的位置信息对三个姿态角进行最佳估计。
3 实验结果与分析
3.1 实验数据
为了对比两种方法的测姿精度,利用一套车载三天线GNSS实测数据进行检验(4号天线观测数据质量比较差,没有采用),安装位置如图2,车辆运动轨迹如图3。接收机类型为NovAtel,数据采样率为1 Hz,其中天线1为主天线,1、2天线连线与车辆主轴方向一致,数据采集于2013年12月06日(武汉)。为了能对多天线姿态结果进行外符合精度分析,车上还安装了一台陀螺漂移为0.005 (°)/h,加速度计零偏稳定性优于10-3g的高精度惯导。

图2 天线安置图Fig.2 Antenna configurations

图3 车辆运行轨迹Fig.3 Vehicle trajectory
3.2 结果分析
首先利用自主编制的动对动GNSS相对定位软件,
解算主天线1与其它天线之间在L系中的基线矢量为及其中误差估值。数据采集前,测量出这两条基线在载体坐标系中的基线矢量为。
直接法、最小二乘法解算的姿态结果和高精度惯导输出的姿态结果见图4,其中蓝线表示直接法,绿线表示最小二乘法,红线表示惯导结果,纵坐标表示姿态角,横坐标表示GPS周秒。
从图4可以看出,直接法和最小二乘法得到的姿态角与高精度INS输出的姿态结果在变化趋势和大小上是基本一致的,这说明本文采用的直接法和最小二乘法解算的姿态是正确的。

图4 直接法、最小二乘法与惯导姿态结果Fig.4 Attitude results from direct method, least squares method and INS
3.3 内符合精度分析
利用式(7)~(9)计算的直接法姿态角中误差和利用式(14)计算的最小二乘姿态角中误差结果见图 5。由图5可知:最小二乘法的航向角中误差估值明显比直接法的小,大多数历元在0.1°左右;俯仰角中误差估值稍优于直接法,约 0.2°~0.5°;横滚角中误差估值在约460 000 s前和直接法结果基本一致,在其后比直接法的结果大。通过分析可知其原因为航向角中误
差估值仅与基线水平方向分量有关,而俯仰角和横滚角中误差估值与基线的水平分量和垂直分量都有关。GNSS基线解算中垂直分量的精度比水平方向差,直接法仅用部分基线的垂直分量,最小二乘法利用所有基线的垂直分量。分析GNSS基线解算结果可知,基线在约460 000 s后卫星数减少,大多只有5颗,之前卫星数多为8~9颗,系数阵结构导致基线垂直分量中误差估值偏大,影响俯仰角和横滚角中误差估值。
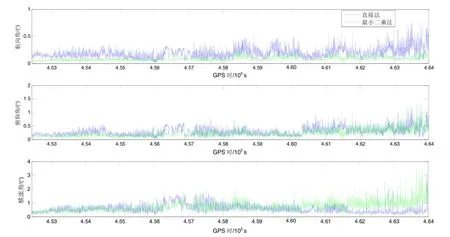
图5 直接法和最小二乘法的姿态角中误差估值Fig.5 Standard deviations of attitudes from the direct method and the LS method
3.4 外符合精度分析
将两种方法计算的各时刻姿态结果减去该时刻高精度INS输出的姿态结果,得到的姿态误差序列见图6;对姿态误差序列进行统计,其结果见表1。

图6 直接法和最小二乘法的姿态误差结果Fig.6 Attitude errors of the direct method and the LS method
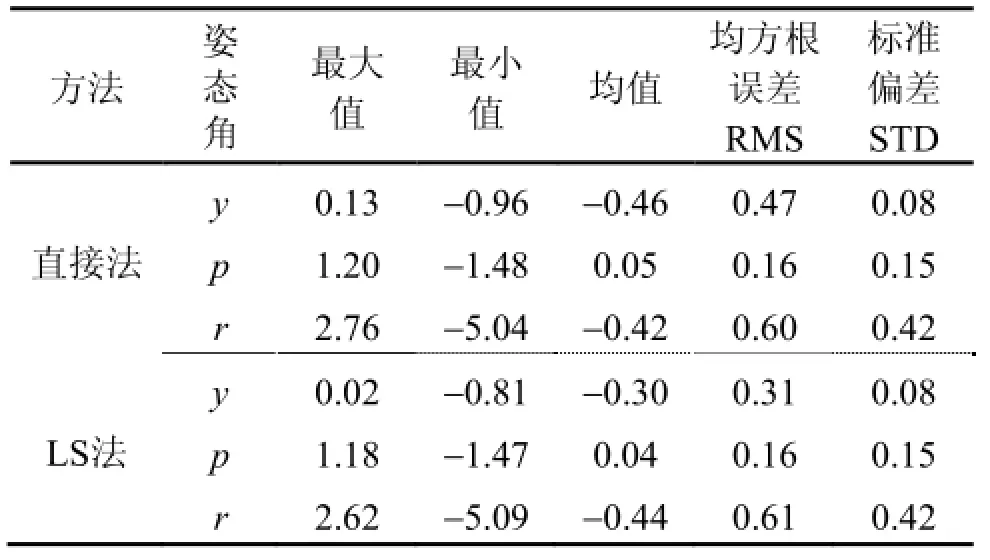
表1 姿态误差统计结果Tab.1 Statistical results of the attitude errors (°)
由图6可知,两种方法的航向角误差都存在明显的系统性偏差,这可能是由于天线1、天线2确定的载体系Y轴方向与高精度INS确定的载体系的Y轴不一致造成的。表1中:最小二乘法得到的航向角RMS小于直接法的,即最小二乘法的航向角更接近高精度INS航向角;两种方法得到的俯仰角和横滚角的RMS基本一致,分别约为0.16°和0.60°;两种方法得到的姿态角稳定性,即STD基本一致,航向角、俯仰角、横滚角分别约为0.08°、0.15°、0.42°。
从以上分析可知:两种方法的姿态角内符合精度存在一定的差异,大部分时刻最小二乘姿态法精度优于直接法。但是两种方法的外符合精度基本一致,仅在航向角系统偏差估计方面存在差异。
4 结 论
本文详细推导了两种多天线姿态解算方法的数学模型及内符合精度估计模型,并结合高精度INS姿态结果,对两种方法的姿态内、外符合精度进行了评定。得到如下结论:
1)最小二乘法的航向角内、外符合精度均优于直接法结果;
2)最小二乘法的俯仰角和横滚角的内符合精度受基线垂向精度的影响比较大,而两种方法的外符合精度结果基本一致。
(References):
[1] 黄显亮, 温连峰, 王强, 等. 基于多基线GPS舰船姿态测量系统研究[J]. 舰船电子工程, 2009, 29(12): 80-82.
Huang Xian-liang, Wen Lian-feng, Wang Qiang, et al. Research on multi-baseline warship attitude system of GPS[J]. Ship Electronic Engineering, 2009, 29(12): 80-82.
[2] 李黎, 李浩军, 王潜心, 等. 采用GPS精密单点定位技术实时确定舰船位置与姿态[J]. 测绘科学, 2014, 39(10): 3-6, 41.
Li Li, Li Hao-jun, Wang Qian-xin, et al. Location and attitude determination of vessel by GPS real-time precise point positioning technique[J]. Science of Surveying and Mapping, 2014, 39(10): 3-6, 41.
[3] Chen D, Lachapelle G. A comparison of the fast and least-squares search algorithms for on-the-fly ambiguity resolution[J]. Journal of the Institute of Navigation, 1995, 42(2): 371-390.
[4] LU Gang. Development of a GPS multi-antenna system for attitude determination[D]. University of CalGary, 1995.
[5] Cohen C E. Attitude determination using GPS[D]. Stanford University, Dec. 1992.
[6] Emel’yantsev G I, Stepanov A P, Blazhnov B A. Attitude determination by INS/GNSS system aided by phase and magnetometer measurements for spinning vehicles[J].Gyroscopy and Navigation, 2014, 5(4): 205-212.
[7] 王潜心. 机载GPS动态定位定速与定姿理论研究及软件开发[D]. 中南大学博士学位论文, 2011.
Wang Qian-xin. Research of airborne GPS kinematic position velocity and attitude determination and software development[D]. Central South University, 2011.
[8] 张欣. 多旋翼无人机的姿态与导航信息融合算法研究.中国科学院大学博士论文, 2015.
Zhang Xin. Research on the attitude and navigation information fusion algorithm of multi-rotor UAV[D]. Chinese Academy of Sciences University, 2015.
[9] 高源骏. GPS测姿算法与天线布局研究[D]. 哈尔滨工业大学硕士学位论文, 2011.
Gao Yuan-jun. Research on GPS attitude determination algorithm and antenna configuration[D]. Harbin Engineering University, 2011.
[10] Wang Chao-chao. Development of a low-cost GPS-based attitude determination system[R]. Report of the University of Calgary, 2003.
[11] 陈杨, 唐艳, 周伟, 等. 三天线GPS姿态解算误差分析[J]. 全球定位系统, 2012, 37(3): 16-18.
Chen Yang, Tang Yan, Zhou Wei, et al. Attitude resolution error analysis using three GPS antennas[J]. GNSS World of China, 2012, 37(3): 16-18.
[12] Zhen Dai, Knedlik S, Loffeld O. A Matlab toolbox for attitude determination with GPS multi-antenna systems[J]. GPS Solutions, 2009: 241-248.
[13] Alvi B, Asif M, Siddiqui F, et al. Robust controller design for satellite attitude determination, stabilization and control using LQG/LTR[J]. Wireless Personal Communications, 2015, 85(2): 329-344.
[14] 刘志俭, 胡小平, 贺汉根. 惯导辅助的基于 GPS的航向姿态参考系统的设计与实现[J]. 中国惯性技术学报, 2003, 11(2): 14-18.
Liu Zhi-jian, Hu Xiao-ping, He Han-gen. Design and realization of inertial-aided GPS-based attitude heading reference system(AHRS)[J]. Journal of Chinese Inertial Technology, 2003, 11(2): 14-18.
[15] Moutinho A, Figueirôa M, Azinheira J R. Attitude estimation in SO(3): A comparative UAV case study[J]. Journal of Intelligent & Robotic Systems, 2015, 80(3): 375-384.
[16] No H, Cho A, Kee C. Attitude estimation method for small UAV under accelerative environment[J]. GPS Solutions, 2014, 19(3): 343-355.
[17] Zhao S, Huang C, Qi X, et al. Application of BeiDou navigation satellite system on attitude determination for Chinese space station[C]//China Satellite Navigation Conference. 2015: 13-25.
[18] Lou L, Neal M, Labrosse F, et al. An approach to improving attitude estimation based on low-cost MEMSIMU for mobile robot navigation[J]. Springer, 2011: 378-379.
[19] No H, Cho A, Kee C. Attitude estimation method for small UAV under accelerative environment[J]. GPS Solutions, 2015, 19(3): 343-355.
[20] Moore M, Rizos C, Wang J. Quality control issues relating to an attitude determination system using a multi-antenna GPS array[J]. Geomatics Research Australasia, 2002: 77: 27-48.
Analysis on precision of two attitude determination methods using GNSS multi-antenna data
ZHANG Fang-zhao1,2, CHAI Yan-ju1, CHAI Hua1, DING Lei-xiang1,2
(1. State Key Laboratory of Geodesy and Earth’s Dynamics, Institute of Geodesy and Geophysics, Chinese Academy of Sciences, Wuhan 430077, China; 2. University of Chinese Academy of Sciences, Beijing 100049, China)
With the use of precise baseline vectors and their variance estimators, calculated using the GNSS multi-antenna data, two classic attitude determination methods, i.e. the direct method and the Least Square (LS) method, are investigated. The numerical results achieved by the above two methods are analyzed with a set of three-antennas on-board GNSS data. This is done by comparing the attitude results of the high-precision INS whose gyro drift is about 0.005 (°)/h and the accelerometer bias is better than 10-3g. The major findings are as follows: the internal precision of the yaw, pitch and roll by the direct method are 0.3°~0.5°, 0.3°~1.0° and 0.5°~1.0° respectively. In contrast, by the LS method these values are 0.1°, 0.2°~0.5° and 0.5°~2.0° respectively. Hence, the internal precision of the yaw is improved by using the LS method. When using the attitude angles of the INS as references, the external precision of the yaw (with the system bias of the yaw removed), pitch and roll by the direct method are about 0.08°, 0.15° and 0.42° respectively. The results by the LS method are almost the same with those by the direct method, excepting that the system bias of the yaw is smaller.
multi-antenna GNSS attitude determination; direct attitude method; LS attitude method; attitude precision
P228
A
1005-6734(2016)01-0030-06
10.13695/j.cnki.12-1222/o3.2016.01.07
2015-09-11;
2016-01-29
国家自然科学基金(41174031,41374043,41231064);中科院124项目(Y309441046)
张方照(1987—),女,硕士研究生,主要从事多天线GNSS姿态解算研究。E-mail: zhaosunshine@163.com
