眼底图像中视盘的自动定位方法研究
2016-05-18张先杰张贵英
张先杰++张贵英
摘要:视盘是视网膜图像的重要特征,其准确定位是视网膜病变诊断和治疗的重要前提,为眼底图像处理和识别等工作的基础。本文综述了视网膜图像中视盘定位算法研究现状;分析了各种视盘定位方法的优缺点;最后总结全文,对视盘自动定位方法进行了展望。
关键词:眼底图像;视盘;定位
中图分类号:TP18 文献标识码:A 文章编号:1009-3044(2016)09-0205-02
视神经盘也叫视神经乳头,简称为视盘(Optic Disc, OD),视网膜上视觉纤维汇集穿出眼球的部位,为视觉神经的始端,是视网膜眼底图像的一个重要特征和组成部分。视盘的准确检测是诊断视网膜病变的重要前提。视网膜图像被广泛地应用于眼科眼底病变的诊断与治疗。视盘的准确定位与糖尿病视网膜病变、高血压视网膜病变、视网膜脱离的裂孔定位、眼底肿瘤定位以及视网膜血管性疾病的诊断与治疗息息相关,视神经盘的形状、大小,颜色、面积和生理杯深度等参数是衡量眼底健康状况和病灶的重要指标。视盘定位是眼底图像配准拼接、血管跟踪、黄斑和病变提取,以及视盘边缘定位等工作的基础。快速准确地检测视盘是实现视网膜疾病诊断和视网膜特征识别的前提和关键步骤。本文研究视网膜图像中视盘的自动定位算法,为眼底病变相关软件系统提供技术支持。
1 眼底图像中视盘定位概述
用来做视盘定位最常用的主要有3种特性:外观特性、血管特性、空间尺度和位置约束特性。视盘的外观特性主要表现在如下方面:就灰度值来说,视盘区域灰度值最大,对比度最大;形状近似于圆形或椭圆形;彩色图像表现为颜色为亮黄色。而眼底图像中的血管特性主要表现为视盘区域为主血管交汇区,视盘区域的血管的特性表现为血管粗、密度大;主血管整体走向为抛物线形,最高点汇集于视盘中心;视盘区域血管垂直方向占支配地位,其它位置水平方向占优势。空间尺度和位置约束特性主要是指拟合的血管抛物线、视盘中心和黄斑中心三者满足空间位置约束关系。科研人员依据视盘的上述特性,对视盘的定位进行了大量深入的研究。
2 视盘定位研究现状
目前,科研人员基于眼底视盘的几何、血管和自身特征来定位视盘,国内外学者提出了多种视盘定位方法,可分为以下几类。
2.1基于视网膜血管结构的方法
血管结构在眼底图像中相对稳定可靠,并且在病变图像视盘定位中有更稳定的性能。视网膜血管网络汇聚点即为视盘,很多算法根据这一属性来定位视盘。G.A.Hoover[2]等提出利用模糊收敛算法进行血管分割来定位视盘的位置。首先对提取的血管进行细化操作,然后擦除血管的分叉点而得到一些血管段,构造模糊血管段,进而使用基于投票方法得到收敛图,收敛图进一步被模糊化并阈值化后取收敛度最强点作为视盘位置。该算法用到了血管在视盘点汇合度高这个特性,但是需要精细的血管信息同时在血管分叉处容易给出错误分叉信息,导致算法易出错且复杂度高,其在 STARE 数据库中准确率为89%,平均耗时为15秒每幅。M.Foracchia[3]先检测出主要的视网膜血管,根据两个抛物线模型顶点的交点来定位视盘。该方法准确率为97.5%,耗时约为2分钟每幅。
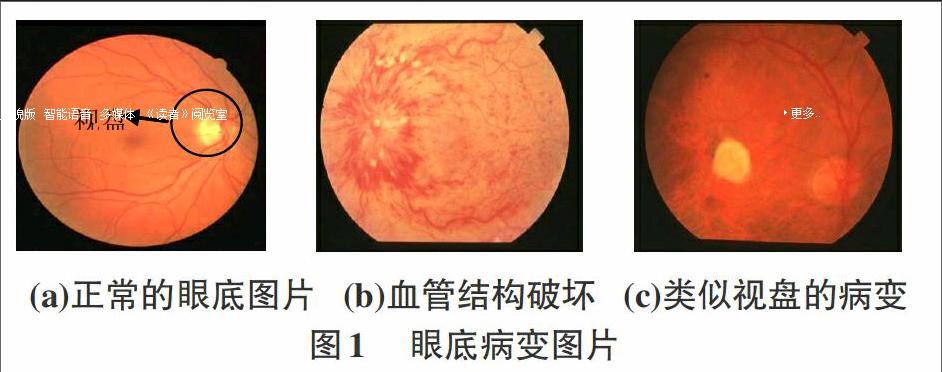
这类方法定位准确率较高,但有两方面的缺点,一方面血管有时候收敛于视盘区,但并不是收敛于视盘的中心点;另一方面,这种方法需要事先分割出血管,而血管的分割本身是一个复杂且耗时的工作,且仅适用于血管网络结构清晰的视网膜眼底图像,对于图像质量不高,尤其是病变情况下的血管分割,这类算法的鲁棒性不高。例如,在图1所示,图(a)为正常的眼底图片,图(b)血管结构破坏,此类算法很难分割出血管。因此,这种算法的鲁棒性不高,仅依靠血管结构来定位视盘仍然是一个比较有挑战的工作。
2.2 基于视盘外观特征的方法
H.Li[4]提出了一种基于视盘外观特征来定位视盘的方法。首先聚类1%的最大灰度值像素得到候选区域,这些候选区域主要来源于视盘或亮色病变区,然后将这些像素点被聚合成像素簇,再通过聚类分割把小于整幅图像面积0.04%的像素簇予以排除,获得视盘候选区域,再通过PCA方法将新的视网膜图像投影到“盘空间”,将原始图像与其投影之间距离最小的区域定为视盘中心。T.Walter[5]根据视盘区域亮度变化最大这一自身特性,寻找亮度变化最大圆形区域的中心点作为视盘中心点位置。该方法使用了形态学滤波技术和分水岭变换。
这类方法定位速度较快,可满足实时性需要。基于视盘大致的圆形结构和相对眼底其它部位有比较高的亮度,对于有病变出现的视网膜,这种方法鲁棒性不强。如图1(c)中所示,该图中有类似视盘形态和亮度的病变区域出现,此时基于视盘外观的方法对于视盘的定位往往出错。
2.3融合视网膜血管结构和视盘特征的方法
一般而言,融合可以获得关于视盘更多的信息,因为能获得更高的准确性。A.Youssif[6]先分割出视网膜血管,接着利用血管的方向和结构信息来选出视盘的候选区域,再根据视盘的形状及灰度信息从候选区域中找出视盘所在位置,该方法的准确率较高。为了达到实时需要,A.E.Mahfouz[7]提出了一种快速的视盘定位方法,该方法把2D图像特征投影到水平和垂直坐标,把二维图像特征变为两个一维信号,图像的特征包括血管的方向和亮度特征。该方法在340副图像的数据集上实验,正确率为97%。S.Ravishankar[8]首先利用主血管及血管的汇合找到视盘的大致位置,然后利用颜色特征进一步定位视盘。在516副不同对比度、光照和病变的眼底图像上实验,得到了97.1%的正确率。赵晓芳[9]提出一种综合利用视网膜眼底图像中血管结构和视盘特征的视盘自动定位方法。考虑到提取血管本身是一项复杂的工作,因此作者首先利用眼底血管网络的灰度信息去定位视盘的横坐标,未提取血管,同时综合利用视盘范围灰度变化最大值及视盘周围血管的灰度最小值来定位视盘的纵坐标;然后利用视盘本身属性,即形状近似于圆的属性,用Hough变换准确定位视盘的中心及边界。H.Yu[10]首先利用模板匹配的方法筛选出视盘的候选区域,然后根据血管的特征来进行视盘的准确定位。该方法在MESSIDOR数据集1200副图片上实验,正确率为99%。
这类方法相对于前两类方法,定位准确率更高。这类方法需要事先分割血管,耗时复杂。在病变情况下,有类似视盘的白斑存在,依据灰度信息和近似于圆的属性,这种方法往往定位失败。
2.4 综合利用视盘区域的多种特性
如A. Rovira[11]利用视盘与黄斑、血管之间的距离和角度关系来确定视盘的中心点。C.Duanggate[12]提出了一种基于分类器视盘定位的方法,该方法主要是用三个分类器对眼底图像的特征进行分类筛选,最终通过三个分类器筛选的像素点即为视盘。还有一些文献融合多种算法,再通过决策投票选出盘中心位置点如 R. J.Qureshi[13]。S.A.Ramakanth[14]提出了一种特征匹配的方法。首先选择一个视盘的模板图片,然后计算要定位图片块和模板块的一致性,这种一致性提供了需定位块和模板块的接近分布,通过此分布来定位视盘。
该类算法利用多种特征进行视盘定位,能够提高定位的鲁棒性,但算法的效率较低。怎样有效的利用多种特性或特性之间的特殊关系,是一个很难决策的问题,这可能导致复杂的定位模型与算法,不便于在实际中应用。
2.5半自动视盘定位
上述算法均为全自动视盘定位,由于目前计算机智能有限,对于普通的视网膜眼底图像,全自动的图像定位方法通常只能依据低层的像素特征,算法的鲁棒性和正确性很难保证,为此,人们提出了半自动的交互式图像定位,董银伟[15]针对眼底图像视杯和视盘水平集分割中 C_V 模型自适应能力不强等问题,提出一种基于 C_V模型的视盘和视杯交互式水平集分割算法。针对视盘与视杯两个定位目标,人工给定相应的初始轮廓,进行相关参数设定,然后迭代,最终获得视盘与视杯准确轮廓! 实验结果表明,该方法可克服噪声污染"光照不均匀"对比度低等特点对眼底图像分割的影响,对彩色眼底图像中的视杯精确定位。
式中,
该方法虽然能精确地得到视盘,但需要用户给定初始轮廓和迭代次数等相关参数,在视网膜图像中视盘的自动定位系统中难以满足用户的需求。
3 结束语
综上所述,科研人员对视盘的定位进行了大量研究,主要依据眼底视盘的几何、血管和自身属性,或者融合视盘多种特性。现有算法视盘定位的准确率较高,速度较快,鲁棒性较高,一定程度上满足了实时性需要。基于视网膜血管结构的视盘定位方法需要事先分割出血管,计算复杂度比较高。视盘定位的正确率和速度没有兼顾,利用视盘各种特征的定位算法定位,效果较好,但定位时间较长,不利于实时操作。现有算法中的特征均为传统特征,为了提高视盘定位的准确性和速度,可考虑提取视盘的深度学习特征,融合传统特征和深度学习特征,筛选出最能刻画视盘本质的特征。已有算法都是在小规模数据库中进行了测试,对于算法的评估不够客观全面。为了验证算法的有效性和鲁棒性,可以在更大的数据集上进行算法的测试。
参考文献:
[1] 刘国才,王耀南, 全惠敏. 基于多层 Mumford-Shah 向量模型的彩色视乳头图像杯盘重建、分割与度量[J]. 中国生物医学工程学报, 2007,26(5):700-707.
[2] A.Hoover, M.Goldbaum. Locating the optic nerve in a retinal image using the fuzzy convergence of the blood vessels [J]. IEEE Transactions on Medical Imaging, 2003,22(8):951-958.
[3] M.Foracchia, E.Grisan, A.Ruggeri. Detection of optic disc in retinal images by means of a geometrical model of vessel structure[J]. IEEE Transactions on Medical Imaging, 2004, 23(10):1189-1195.
[4] H.LI,C.Opas. Automatic location of optic disk in retinal images [A]. Proceedings of the International Conference on Image Processing [C]. Thessalonik: IEEE CS, 2001:837-840.
[5] Walter T, Klein J C, Massin P, et al. A contribution of mage processing to the diagnosis of diabetic retinopathy detection of exudates in color fundus images of the human retina [J]. IEEE Transactions on Medical Imaging, 2002, 21(10):1236-1243.
[6] Youssif A., Ghalwash A., Ghoneim A. Optic disc detection from normalized digital fundus images by means of a vessels direction matched filter [J]. IEEE Transaction on Medical Imaging, 2008, 27(1):11-18.
[7] Mahfouz A. E., Fahmy A. S. Ultrafast localization of the optic disc using dimensionality reduction of the search space [A]. Proceedings of the 12th International Conference on Medical Image Computing and Computer Assisted Intervention [C]. London: IEEE, 2009: 985-992.
[8] S.Ravishankar, Jain A, Mittal A. Automated feature extraction for early detection of diabetic retinopathy in fundus images[C]//Computer Vision and Pattern Recognition, 2009. CVPR 2009. IEEE Conference on. IEEE, 2009: 210-217.
[9] 赵晓芳. 视网膜图像中视盘的快速自动定位方法[J]. 华南理工大学学报(自然科学版), 2011,39(2):71-75.
[10] H.Yu, E.S.Barriga, C.Agurto, et al. Fast localization and segmentation of optic disk in retinal images using directional matched filtering and level sets[J]. Information Technology in Biomedicine, IEEE Transactions on, 2012, 16(4): 644-657.
[11] A.Perez-Rovira, E.Trucco. Robust optic disc location via combination of weak
detectors[C]//Engineering in Medicine and Biology Society, 2008. EMBS 2008. 30th Annual International Conference of the IEEE. IEEE, 2008: 3542-3545.
[12] C.Duanggate, B. Uyyanonvara, S. S. Makhanov, et al. Parameter-free optic disc detection[J].Computerized Medical Imaging and Graphics, 2011, 35(1): 51-63.
[13] R. J. Qureshi, L.Kovacs, B.Harangi, et al. Combining algorithms for automatic detection of
optic disc and macula in fundus images[J]. Computer Vision and Image Understanding, 2012,116(1): 138-145.
[14] S.A.Ramakanth R.V. Babu Approximate nearest neighbour field based optic disk detection[J]. Computerized medical imaging and graphics, 2014, 38(1): 49-56.
[15] 董银伟, 沈建新.基于C-V模型的眼底图像交互式杯盘分割[J]. 计算机应用与软件,2012, 29(5):104-107.
