基于PLC的模糊PID控制在电梯上的应用
2016-05-18
基于PLC的模糊PID控制在电梯上的应用
张凤强 张 颖 张 丹 沈阳建筑大学信息与控制工程学院
本文将模糊控制与PID控制结合起来,通过先进的PLC可编程控制器来实现,完成基于PLC的模糊PID电梯控制系统,并通过计算机仿真和实验验证其控制性能好,响应快,过渡时间短的特点。
PLC;电梯系统;模糊PID控制
引言
传统的PID控制策略针对于时变系统,即当系统参数变化时难以较快适应控制系统,最终不能较好达到预期效果。本文在PID控制的基础上加入模糊控制,对其参数进行模糊化处理,以实现系统的灵活性和稳定性。
1. 模糊PID控制器
模糊PID控制器[1]就是将模糊控制器与PID控制器结合起来,对PID的输入参数进行模糊自适应处理,这样相比于单独的模糊控制器,可以提高灵敏度,减少响应时间,及时调整系统,削弱外界信号的干扰,更好地适应系统的不确定性和复杂性,具体的控制原理如图1所示。
2.模糊控制算法的PLC实现
模糊控制器的核心是模糊控制算法,该算法是根据实际生产过程和操作人员的经验来完成模糊控制规则表,然后按照模糊推理规则得出相应的控制量,再经过在线反复的调试和修改,最后得到模糊控制表。如表1所示。

图1 模糊PID控制系统图
以PID的三个参数KP,Ki,Kd为输出变量,关于KP,Ki,Kd相应的模糊变量子集为{NB,NM,NS,ZO,PS,PM,PB},KP论域为{-0.3,0.3},Ki论域为{-0.06,0.06},Kd论域为{-3,3}。经过复杂的处理及现场调试,最终得到关于三个输出参数模糊控制规则表。此处以KP为例进行阐述。
为实现PLC控制,本文采用查表法,为方便程序设计,将{NB,NM,NS,ZO,PS,PM,PB}转化为{0,1,2,3,4,5,6},在将转化后的表2-1,表2-2,表2-3内元素按从上到下,从左到右的顺序逐个存入MD0-MD146中,Ec存入MD147中,E存入MD148中,本文设定模糊控制变量的基础地址是100,人为舍得偏移量是Ec×5+E,最终可得到控制量的地址为100+Ec×5+E。
3.电梯系统的软件设计
电梯的初始化程序主要功能是在电梯的安装和电梯发生故障后来确定电梯停靠位置,在电梯发生故障后,启动初始化程序,使电梯向下运行至限位开关处,然后停止运行,再打开上行接触器,使电梯向上运行至1层的上平层信号处,此时断开上行接触器,电梯停止运行并发出准备就绪信号,初始化程序结束[2]。相关流程图程序如图2所示。
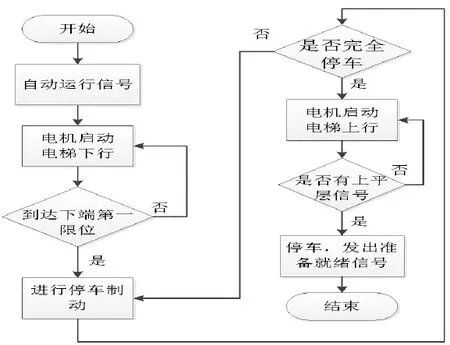
图2 初始化流程图
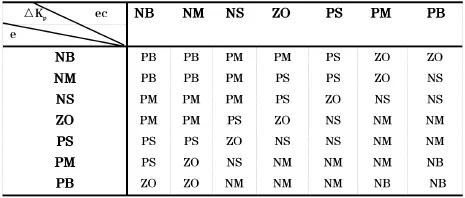
表1 模糊控制规则表
4.电梯轿厢与开关门控制程序
4.1 电梯轿厢向上运行
电梯轿厢运行时要先判断其运行趋势,电梯轿厢的运行趋势与某层(非呼梯最高层)呼梯的方向(上或下)相同时,电梯轿厢才会停止在该层。以最高为6层的电梯,轿厢处于1层为例,当2层有向上呼梯,5层有向上呼梯,则电梯轿厢依次停在2层和5层,而当2层有向下呼梯,5层有呼梯信号时,电梯轿厢会先上升到5层,此时经过2层时电梯轿厢不停止。
4.2 电梯轿厢向下运行
电梯轿厢向下运行的原理与向上运行原理基本一致,同样以最高为6层的电梯,轿厢处于6层为例,此时当5层有向下呼梯信号,2层有呼梯信号,电梯轿厢会依次停在5层和2层,而当5层有向上呼梯信号,2层有呼梯信号时,电梯轿厢会先下降的2层,此时经过5时,电梯轿厢不停止。
4.3 开关门控制程序
电梯轿厢的开关门控制程序要做的很细致,将每一个关系到开关门的信号都要考虑进去,否则会很容易发生故障。
5. 仿真实验
仿真实验采用E-Elevator仿真软件,WINCC界面组态软件和西门子 S-1200控制器,首先将程序下载到控制器中,并开始运行,在E-Elevator仿真软件中可看到电梯按照预设的要求进行运行,从视觉上观察其工作状态,我们可以通过组态软件WINCC可以清楚的进行电梯的内部呼梯,外部呼梯,电梯调试,电梯参数修改,从而观察电梯的内部运行状态。
6. 结论
通过模糊PID控制电梯系统的仿真运行效果可以看出,系统具有很好的稳定性,电梯在运行过程中完全按照预设的路线和速度工作,可以大大提高乘客的舒适度。
结果表明,电梯控制系统使用模糊 PID控制策略以后很有效的提高了系统的适应能力和鲁棒性,改善了系统的动、静态品质,相对PID控制来说控制效果更加令人满意。
[1]杨玉杰. 基于PLC的模糊PID电梯控制系统研究[D]. 天津:天津大学电气与自动化工程学院,2013.
[2]周桦. 电梯PLC控制系统的设计与实现[D]. 成都:电子科技大学,2012.
张凤强(1993-),男,沈阳建筑大学学生,电气工程及其自动化
