一种新型船用运输机构
2016-05-18房玉吉
房玉吉,李 玮
(中国舰船研究设计中心,武汉 430064)
一种新型船用运输机构
房玉吉,李玮
(中国舰船研究设计中心,武汉 430064)
摘要:介绍国内外几款典型的应用于非结构环境下的移动机构,分析其各自的优缺点,提出一种面向“立板式”障碍的移动机构。该机构对“立板式”障碍具有较好的适应性,可顺利跨越船舶通道中主横舱壁上的门槛,用于船舶通道中的运输或巡检等。
关键词:移动机构;“立板式”障碍;船舶通道
随着远洋船舶不断朝着大型化方向发展,舰船的吨位变得越来越大,船上人员变得也越来越多,这对舰船上的生活保障设施提出了更高的要求,出现了很多亟待解决的问题,其中有船上生活物品的转运问题,例如,食品,物品及垃圾的转运。由于舰船上出于对防水,防火的要求,设置了很多主横隔壁,导致在主通道上,用于跨越主横隔壁的门上也存在一定高度的门槛,这给物品转运带来了较大的困难。
一般情况下舰上选择人工搬运或者使用木桩斜面的形式跨越门槛,由于舰员较多,每天要运输的物品量非常大,人工搬运的方式对人力资源消耗较大,使用木桩的形式在人员穿越主横舱壁上门洞的时候容易撞头受伤,且还牵扯到木桩的摆放和收集问题,两种方式都不能很好地解决舰上物品转运问题。船上通道属于非结构环境,一般的运输机构无法在该环境下正常使用。
1国外研究现状
国外应用于非结构环境的移动机构最成功的案例当数Sojourner探测车和火星车Mars Rover。Sojourner探测车外观见图1,由美国喷气推进实验室研制。该探测车采用6轮摇臂悬吊式结构,对复杂地形具有优良的适应能力,该产品的4个角轮可实现独立驱动和控制,保证了良好的机动性[1]。火星车Mars Rover外观见图2,已在火星成功着陆,该产品具有强大的越障能力、原地360°的转弯能力及伸缩性,具备超强的机动性能。

图1 Sojourner探测车外观

图2 火星车Mars Rover外观

图3 Go-for机器人外观
Go-For机器人外观见图3,由美国喷气推进实验室研制,此产品在翻倒时,通过旋转改变前后腿的分布角度,从而改变自身的重量分布,实现自位过程,可以使自己重新站立起来[2]。德国人工智能研究中心研制出一款移动机器人,外观见图4。该产品属于轮腿复合式结构的变结构形式,由机体和4个轮子组成,每个轮子由5个杆件组成,对地形有较好的适应性[3],但该机器人颠簸震动较大,基本无法实现高速行驶。

图4 轮腿混合式机器人ASGUARD外观
最能代表当今世界移动机构发展水平和引领未来发展方向的两款移动机构应数美国的“大狗”机器人和日本的“ASIMO”机器人。
美国的“大狗”机器人外观见图5,由波士顿动力学工程公司(Boston Dynamics)专门为美国军队研究设计,该产品能够在战场上为士兵运送弹药、食物和其他物品。当受到“骚扰”时,优异的主动平衡性可使其保持稳定,最新款“大狗”可以攀越35°的斜坡,可以承载40多kg的装备,即使行走在冰面上,也不会摔倒。

图5 “大狗”机器人外观
日本的“ASIMO”机器人外观见图6,该产品行走自如,可进行“8”字形行走和上下台阶,此外,该产品还能够以6 kg/h的速度奔跑,而且能在奔跑过程中自行改变方向。“ASIMO”的全身各部位具有极高的平衡性和协调性,能够随着音乐翩翩起舞,推车前进、搬运托盘更是让其他机器人望尘莫及。

图6 “ASIMO”机器人外观
2国内研究现状
国内在应用于非结构环境下移动机构的研究主要集中在高校。南京理工大学设计的一种改进的摇臂-转向架式6轮腿移动机构见图7,在O、A、O′和A′点处分别安装了直流伺服电机和增量编码器,负责移动机构越障时的抬腿操作和在非平整地面环境下调整关节角度以保持车体的平稳;行驶机构两侧的摇臂通过差速装置连接,主车体固定在差速箱体上,差速装置箱体与前摇臂固定,而差速装置的差速轴与后摇臂固定,以减缓主车体左右倾斜程度[4]。
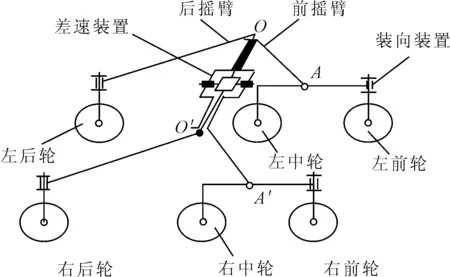
图7 改进的摇臂-转向架式六轮腿移动机构
北京航空航天大学提出了一种变结构轮/腿式探测机器人(见图8),机器人车身采用可变形的平行六边形结构,6根杆顺序以铰链连接,通过控制连接点处角度的变化就可以使探测车横向宽度发生变化,车身两侧分别对称装有2条相同且相互独立的轮腿混合结构,每条腿都有3个自由度,其机构可以变化为轮式或腿式步行机构[5]。

图8 变结构轮/腿式探测机器人组成示意
哈尔滨工业大学设计的一款移动机器人行走机构见图9,外观图见图10。该机器人为轮腿复合式机构,主要由车身和6套轮腿系统组成。每个车轮都有单独的驱动电机,每个轮腿系统与车身的连接处有一个转动关节,也有独立的驱动电机,整个机器人有12个自由度。该机器人对垂直障碍、壕沟障碍、斜面等典型障碍有较好的通过能力,但对立板式障碍通过性较差。

图9 轮腿复合式移动机器人行走机构示意

图10 轮腿复合式移动机器人外观
3一种新型越障移动机构
3.1总体结构介绍
提出一种新型越障移动机构结构见图11,为轮腿复合式结构,整个移动机构由车体和6套轮腿结构组成。每套轮腿结构与车体的连接处(图中A、B、C、D、E、F)都有一个转动副。将6套轮腿结构按车前后方向分为4排,每排的轮腿结构都有一个驱动电机驱动,使整个轮腿结构可以绕其转动副在空间内沿任意方向做任意角度的旋转。针对船舶上空间狭小的特点,移动机构需要有足够的灵活性,且考虑到控制的复杂性,移动机构的6个车轮中,只有最前和最后的2个车轮安装有驱动行走和驱动转向的电机,中间的4个车轮为万向轮,这样整个移动机构共有8台驱动电机,使该机构可以在平面内按照任意半径旋转。

图11 新型越障移动机构结构示意
3.2越障动作规划
下面根据图12对越障移动机构跨越“立板式”障碍的动作规划进行分析,为表达方便,移动机构以其侧视图表示。

图12 移动机构动作规划示意
1)初始状态为“立板式”障碍在移动机构的正前方,如图12a)所示。此时机构最前排轮腿复合式结构通过电机驱动向前抬起,使前轮高于障碍的高度,如图12b)所示,通过最后排轮的驱动使整个机构前进,障碍在前排车轮的下方顺利通过,进入如图12c)所示的状态,前排轮腿复合式结构向后摆动,恢复到初始状态。
2)第二排的2套轮腿复合式结构按顺时针方向向后摆动,使其车轮高于障碍物的高度,如图12d)所示。此时前、后车轮驱动整个机构前进,进入图12e)所示的状态。第二排轮腿复合式结构继续按顺时针方向旋转,直至回复到初始状态,如图12f)所示。
3)第三排轮腿复合式结构重复步骤2中第二排轮腿复合式结构的动作,经过图12g)所示状态,进入图12h)所示状态。
4)最后排轮腿复合式结构顺时针旋转抬起,如图12i)所示,通过最前排车轮驱动前进,最后排车轮跨越障碍后,反方向旋转,回复到初始状态,如图12j)所示。
即使在有一定负载的情况下,该移动机构的结构特点可保证在越障的整个过程中,整体的重量重心都在轮腿复合式结构的支撑范围内,机构不会发生倾覆。
4结束语
目前国内外的移动机构均不能较好的应对“立板式”障碍,所提出的越障移动机构对“立板式”障碍的适应性较强,可应用于该类典型障碍环境中的运输、巡检等,有一定的应用前景。
参考文献
[1] 何峰.六轮腿移动机器人运动分析及控制系统的研究[D].南京:南京理工大学,2005.
[2] 徐贺.可重构多机动模式移动机器人及其关键技术研究[D].哈尔滨:哈尔滨工业大学,2006.
[3] EICH MARKUS, GRIMMINGER FELIX, KIRCHNER FRANK.Proprioceptive control of a hybrid legged-wheeled robot[C]∥Proceedings of the 2008 IEEE International Conference on Robotics and Biomimetics,Bangkok, Thailand, February 21-26,2009:774-775.
[4] 方岗.六轮腿自主移动机器人结构设计和模糊控制技术研究[D].南京:南京理工大学,2006.
[5] 田娜,丁希仑,戴建生,等.一种新型的变结构轮/腿式探测车机构设计与分析[J].机械设计与研究,2004(1):268-270.
特此更正。
A New Type of Obstacle-climbing Mobile Institution
FANG Yu-ji, LI Wei
(China Ship Development and Design Center, Wuhan 430064, China)
Abstract:The typical mobile institutions for the environment of complex structure of terrain are introduced and their advantages and disadvantages are analyzed. A new mobile institution for the vertical-plated obstacle is put forward, which has high adaptability to the vertical-plated obstacle. It can well across the threshold in the ship channel, and can be used in transportation or inspection in the ship channel.
Key words:mobile institutions; vertical-plated obstacle; ship channel
中图分类号:U664
文献标志码:A
文章编号:1671-7953(2016)02-0119-04
第一作者简介:房玉吉(1985-),男,硕士,工程师E-mail:lfivlf@163.com
基金项目:国家部委基金资助项目
收稿日期:2016-01-06
DOI:10.3963/j.issn.1671-7953.2016.02.031
更正声明:本刊2015年第6期第144页,由于排版人员疏漏,将标题“1项目背景”漏掉,
修回日期:2016-01-21
研究方向:船舶辅助系统