高速公路出口前置指示标志安全距离计算模型
2016-05-17崔洪军马新卫李海南
崔洪军,马新卫,李 霞,李 霖,李海南
(河北工业大学 土木工程学院,天津 300401)
高速公路出口前置指示标志安全距离计算模型
崔洪军,马新卫,李霞,李霖,李海南
(河北工业大学土木工程学院,天津 300401)
摘要:为了确立安全合理的高速公路出口前置指示标志(AGS)设置位置,建立了AGS安全设置距离计算模型。将机动车驶出高速公路的行为过程分为反应期、变道期、减速期,并重点研究了AGS安全识别距离与变道期机动车行驶距离。通过建立车辆间隔距离模型与分析调查数据,研究了相邻车道符合变道要求的最小车头间距。运用概率统计与排队论方法分析特定路段的车辆分布,并引入变道成功率,全面考虑驾驶员驾驶特征,最终依据所建计算模型得出不同道路情况下AGS的安全设置距离。通过实例计算得出双向六车道与双向八车道AGS设置安全距离分别为870 m与1 620 m,计算结果与我国现行相关规范中数值有一定程度上的差异。结果表明:不同道路情况计算得出的AGS安全设置距离不同,我国现行相关规范有待改善。
关键词:交通工程; 道路交通安全;计算模型;前置指示标志;合理设置距离;变道成功率;最小可变道车头间距
0引言
科学合理的高速公路出口前置指示标志(Advance Guide Sign, AGS)可有效地为驾驶员提供信息,使其对路况及未来行进方向进行准确的判断分析,并及时采取措施。
国内外目前对于高速公路出口指路标志的位置选定主要依据我国现有相关规范[1-3]和《Manual on Uniform Traffic Control Devices(2009版)》[4],统一将AGS分3级设置于出口匝道上游500,1 000,2 000 m 处,或根据匝道规模大小确定第1块AGS的设置距离[5],但均未考虑高速公路车道数、AGS设置方式、车道车流量等道路条件因素,易犯经验主义错误。郭唐仪等[6]通过构建机动车驶出高速公路模型并运用TSIS-CORSIM模拟来分析合理的AGS设置位置。刘伟铭等[7]通过建立AGS标志模型并进行模拟,分析了影响AGS设置的各因素。上述研究成果对道路条件的考虑依然欠缺充分考虑,部分取值仍然依照原有经验取值。
本文通过分析AGS对机动车驶离高速公路全部过程行为的影响来构建合理的AGS设置安全距离计算模型,并引入变道成功率,计算AGS在不同道路情况、不同变道成功率条件下的最佳设置安全距离,以保证高速公路的通畅和车辆的安全运行。
1模型建立
第1块(最靠近匝道出口的那块)AGS距离分流区最近,对驾驶员的驾驶行为影响最大,驾驶员一旦错过,很有可能会无法进入正确的出口。为避免驾驶员错过目标出口,并充分考虑驾驶员视觉特征、道路交通条件及指路标志遮挡等因素,以第1块AGS为研究对象,建立其理论设置距离计算模型,第2块和第3块AGS可适当增加500 m或1 000 m确定。
1.1机动车驶出高速公路过程分析
以从高速公路最内侧车道行驶的车辆经过变道减速等行为后驶入匝道的过程为例,将驶出过程分为:(1)反应期,即从AGS出现在驾驶员视野范围之内至驾驶员对指示信息判断完毕的过程,其中驾驶员的反应识别时间称为Perception-Reaction Time(PRT);(2)变道期,即从驾驶员开始决定变道到其安全变道到最外侧车道的过程;(3)减速期,即为保证车辆在驶离高速公路前能以匝道限定速度驶入匝道,机动车变道至最外侧车道后进行减速的过程。
1.2模型建立的前提假设
(1)所有驾驶员的驾驶特征和变道规则相同,且均符合安全驾驶。
(2)除变道车辆以外的所有车辆以不变的分布形式行进,且不与所研究车辆同时发生变道行为。
(3)不考虑车长影响。
(4)根据规范,减速车道渐变率约为1/20[1],偏移角度较小,对安全距离影响有限,故模型建立时未考虑减速车道渐变率。
1.3AGS合理设置位置求解模型的建立
以双向八车道高速公路为例,建立如下模型(图1)。
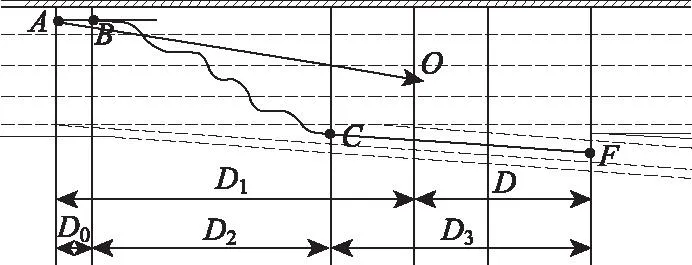
图1 双向八车道高速公路AGS设置模型Fig.1 Model for setting AGS on two-way eight-lane expressway
由模型可知,有以下等式:
(1)
式中,D1为驾驶员AGS安全识别距离;D2为变道期机动车行驶距离;D3为减速期机动车行驶距离;D0为AGS距匝道鼻端距离。
(2)
式中,V1为由内向外第1条车道车辆的运行速度;tr(V1)为速度为V1时的PRT。
(3)
式中,Vc为机动车在C点处时的速度;Vr为匝道处的车辆平均速度;μ为高速公路与机动车轮胎的摩擦系数;G为道路坡度;重力加速度g取9.8 m/s2。
1.4AGS安全识别距离D1的求解
高速公路单向车道数目小于等于3时,AGS通常采用路边直立式设置;车道数目大于等于4时,通常采用道路横跨式设置,且设置在高速公路出口分流区的中心处,因此D1的计算方法有所不同。
1.4.1道路横跨式设置方式下D1的求解方法
此处仍以双向八车道高速公路为例。

(4)
(5)
式中,H为A点到O点的纵向距离;B为单条车道宽度;α为机动车驾驶员与AGS所成视野的清晰角度,取10°[4]。
设单向车道的数目为n(n≥4),则有:
(6)
1.4.2路边直立式设置方式下D1的求解方法
与道路横跨式不同的是,路边直立式AGS设置在路边。设右侧硬路肩宽度为Bh,AGS的横向偏移为Sl,可得:
(7)
设单向车道的数目为n(n≤3),则有:
(8)
2驾驶员变道行为特征分析
根据日常驾驶经验,机动车驾驶员决定变道后,首先会降低机动车的行驶速度,并保持低于右侧车辆的速度寻找可变道空间[8],当驾驶员发现右侧满足变道要求的两车间隔之后,便会进行变道行为。一次变道完成之后,继续减速进入下一次变道准备过程。
3可变道最小间隔研究
3.1变道车辆变道完成时刻车距模型
变道中的两辆车辆,后车(N车)为刚完成变道过程的车辆,前车(N+1车)为所变车道上的原有车辆。当N车在t时刻时刚刚完成变道行进至XN(t)时,倘若N+1车在t时刻进行刹车,N车必须保证两车在停下时(即t′时刻)能够保持一定的安全距离l,N车才能安全变道至N+1车后面。建立模型如图2所示。

L1—前后临近两车在t时刻的间距;Xi(t)—i车在t时刻所处位置;p1—N车反应过程行驶距离;p2—N车制动距离;p3—N+1车制动距离;l—两车静止后保持的安全距离图2 变道车辆与前车距离模型Fig.2 Model of distance between lane-changing vehicle and front vehicle
则有:
(9)
(10)
(11)
(12)
式中,VN为N车车速;tf为反应时间,此处出于安全考虑,tf取2.5 s[7],其中判断时间1.5 s,运行时间1 s。
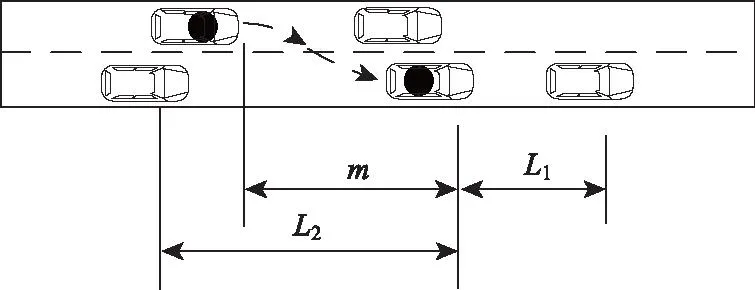
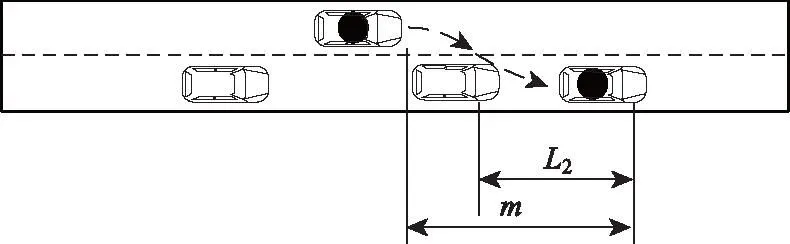
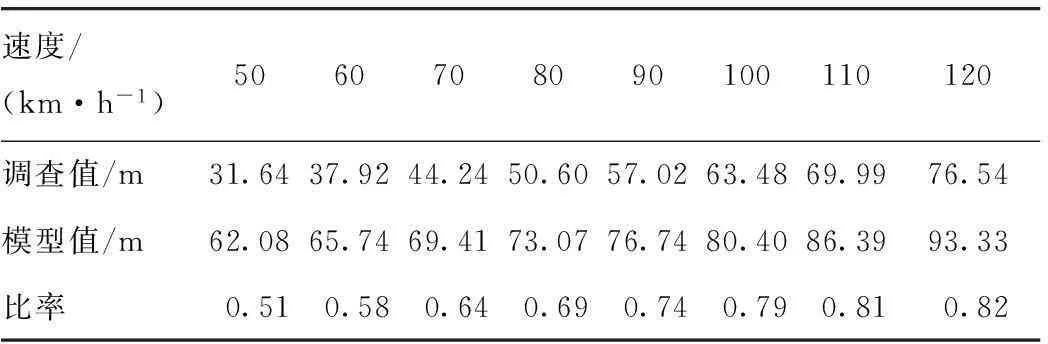
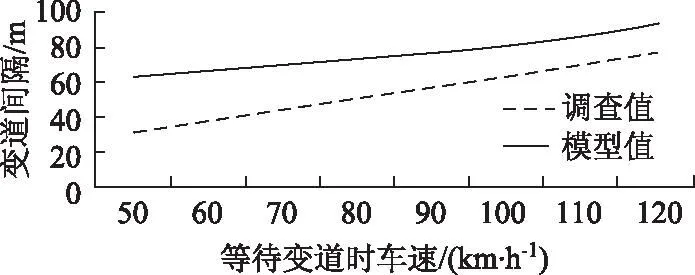
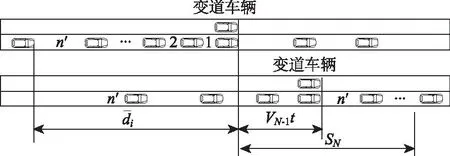
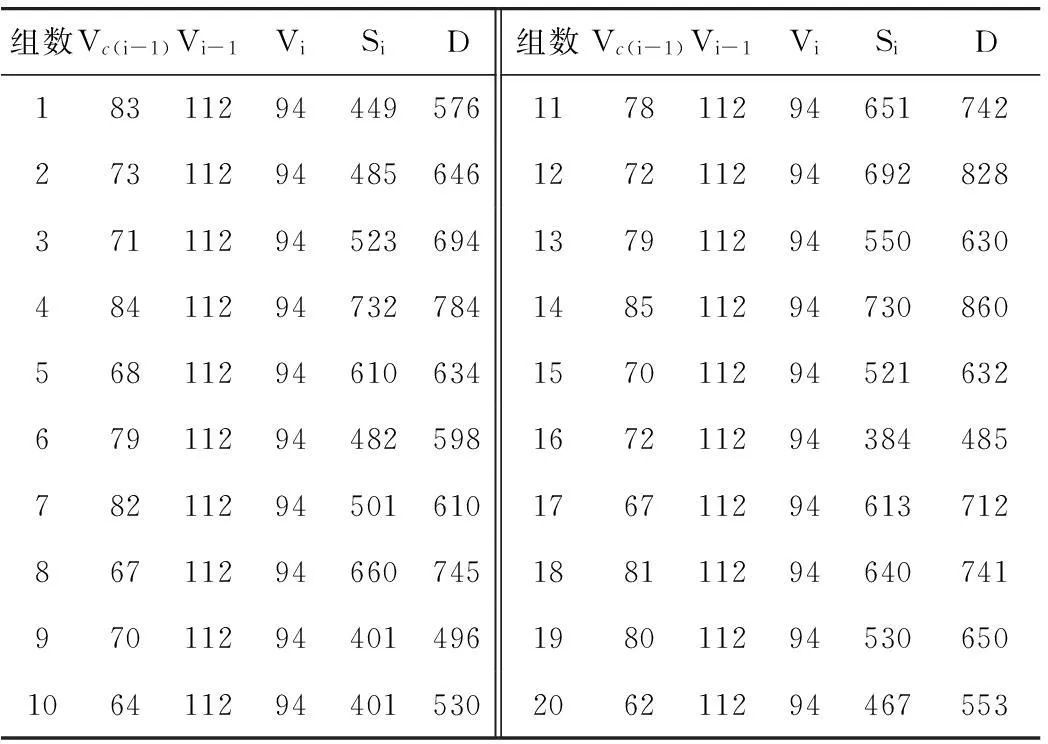
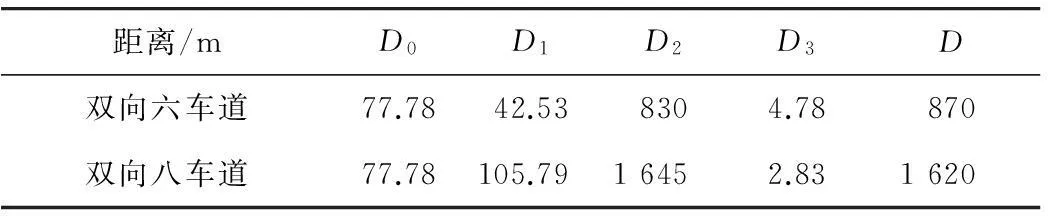
设N-1车为所变车道上的车辆,N车为上一车道刚刚完成变道的车辆。N车在t时刻以速度VN行驶,N-1车在t时刻以速度VN-1行驶(VN L2—前后临近两车在t时刻的间距;—N-1车的制动距离;—N车的制动距离;l—两车静止后保持的安全距离图3 变道车辆与后车距离模型Fig.3 Model of distance between lane-changing vehicle and rear vehicle 则有: (13) (14) (15) 3.2符合变道要求的最小车头间距确定 机动车变道之后,至少需要与前车保持L1的距离并与后车保持L2的距离,机动车才属于安全变道,并假设机动车驾驶员只有在确保安全的情况下才会进行变道[9]。 设汽车变道过程中从开始打方向盘的一刻起到汽车变道完成方向盘回正的过程中,变道车辆的行驶距离为m。车辆变道之后,后车的跟车距离L2需大于m,才能保证机动车在变道过程中不刮蹭到后车。图4所示的是安全变道过程示例,图5是不安全变道过程示例。 图4 安全变道过程Fig.4 Safe lane-changing process 图5 不安全变道过程Fig.5 Unsafe lane-changing process 通过查阅相关资料与询问有高速公路驾驶经验的司机,汽车行驶在高速公路,速度在100 km/h左右时,若车辆进行缓慢变道,方向盘应转1/8圈左右,即汽车转向5°左右[10]。忽略驾驶员操作方向盘所需的时间,实际进行变道过程可以简化为图6。 图6 简化后的变道过程Fig.6 Simplified lane-changing process 则可得: (16) 设车辆可变道的临近车头最小间距为Smin,则有: (17) 3.3可变道间隔修正系数 模型中可变道车头间距的计算对于求解后来机动车处在变道期时的行驶距离比较重要。为使可变道车头间距更加符合实际,笔者在后期进行了一系列的观测调查,以期对此部分计算模型结果进行修正。 由于在高速公路上对于匝道口分流区处进行实地观测调查难度较大,因此调查地点选择在天津市区快速路京津路出口处,此处设计时速为80 km/h,并可以观测到机动车驶出快速路的过程,情景类似于高速公路匝道出口情景。采用事先标记观测路面,在跨线桥中心处进行视频录像和后期分析的方法,对模型计算结果进行修正。 观测调查选在2015年3月18日进行,调查时段为7:00—11:00,共得到37组数据,得到散点图(图7)。 图7 变道车辆车速与可变道间距散点图Fig.7 Scattergram of speed of lane-changing vehicle vs. lane-changeable headway 根据计算模型,变道速度与可变道机动车间隔属于二次相关,用MATLAB软件对数据进行回归分析得到: (18) 式中S′为通过实际调查数据所得回归模型计算得到的变道车辆实际可变道间隔。 据此可得到不同变道速度下的可变道机动车间隔,并与模型计算结果进行对比(见图8)。 表1 调查值与模型计算值对比 图8 调查值与模型计算值对比图Fig.8 Contrast curves of investigation values with calculation values 通过对比两组数据发现,变道车辆寻求的可变道间隔略小于模型计算值,原因是在实际变道过程中,相邻车道后车会自觉进行减速,为变道车辆预留足够的车头间隔以进行安全变道。引入修正参数γ,此处取γ为0.8,最终采用修正值对AGS合理设置位置进行计算。 4变道成功率与变道距离关系模型 分析车辆由第i-1条车道向第i条车道进行变道的过程。设机动车减速完毕后等待变道至完全驶入第i条车道过程中至少所需的行驶距离为Si(i=2,3,…),机动车行进在第i-1条车道等待变道至第i条车道时的行车速度为Vc(i-1), 则在Si的距离内平均分配的车辆数为: (19) 式中ai为第i条车道的交通量;Vi为由内向外第i条车道车辆的运行速度。 平均车头间距为: (20) (21) 则可得车头间距dik的概率分布为: (22) 对于第i条车道上任意的一个dik(k=1, 2, 3,…),可变道概率PYi为: (23) 式中Smin为车辆可变道的临近车头最小间距。 图9 机动车由i-1车道向i车道变道的过程Fig.9 Process of vehicle lane-changing from lane i-1 to lane i 图9为变道车辆开始寻找变道机会的时刻,在相邻车道上变道车辆后方的两车间隔标号分别为1, 2, 3,…,n′,如图中上半部分所示。经历时间t之后,变道车辆行驶至相邻车道第n′个车头间距后方车辆处,如图中下半部分所示。则此种情况下存在满足变道要求的车辆间隔的概率设为PYin′,有: (24) 同时,为保证汽车在行进至第1个可变道车头间距时未驶出之前设定的距离范围Si,n′的范围同样需要界定[11]。假定当汽车行进至第n′个相邻车道车辆的车头间距处时,第1次发现变道机会,此时汽车行驶的平均时间为: (25) 此时,据图9可知: (26) 化简可得: (27) 当n′取最大值时应有最远变道距离,因此令: (28) 设Pi为向第i车道变道成功的概率,引入系数ε,且 (29) 则有: (30) 式中,γ为修正系数;ai,Vi,Vi-1,Smin,m的值均可以根据相关规范以及实际调查与计算得出,只含有未知的Si。若给定超车成功概率,则可求出Si的具体数值。 变道车辆在第i条车道上的减速距离li为: (31) 因此,变道车辆在变道期的行驶距离为: (32) 5实例验证 笔者通过运用高清摄像技术、道路标记以及跟车调查的方法采集了天津市周边某条高速公路临近匝道口段变道车辆行驶的录像和变道距离数据,并在后期进行了数据处理分析,以此对模型进行验证。 此次调查摄像仪器采用SONY DCR-SR68微型摄像机,测速仪器采用BUSHNELL VELOCITY手持式雷达测速仪,调查时间为7:00—10:00和16:00—20:00早、晚高峰期间,各取20组数据。 取V85为被调查车辆的速度作为研究车道的实际车速[12],取调查数据中Vc(i-1)的平均值作为模型中变道车辆等待变道时车速,模型中l取值为5 m,变道成功率取90%。PRT取值为2.5 s[4]。车道宽度B为3.75 m。右侧硬路肩的宽度Bh为2.5 m。AGS设置的横向偏移Sl为3.03 m[2]。在道路状态正常,坡度为零的情况下,机动车平均的减速度约为0.6g[5]。 调查时段单车道车流量ai预估计为20 000 veh/d,其中最外侧车道车流量预估为100 000 veh/d。 以最内侧车道数据为例,调查数据如表2所示。 表2 最内侧车道车辆变道行为调查结果 将以上数值代入关系模型,得关系图(图10)如下。 图10 变道成功率与所需变道距离关系图Fig.10 Curve of relationship between lane-changingsuccess rate and needed distance 根据表2中的数据可得给定模型计算值(见表3)。 调查数据显示,该路段双向八车道高速公路由内向外4条车道平均时速为112, 104, 82, 68 km/h,变道车辆处在4条车道之间等待变道的速度为74, 53, 31 km/h,进入匝道的平均速度为23 km/h。双向八车道高速公路由内向外4条车道的平均时速为112,104, 82, 68 km/h,变道车辆处在4条车道之间等待变道的速度为74, 53, 31 km/h,进入匝道的平均速度为23 km/h。另测得双向六车道数据,并进行比较(见表4)。 表3 最内侧车道车辆变道模型计算值 注:Vc(i-1)′为调查结果中第(i-1)条车道上变道车辆等待变道过程中的平均车速;Vi-1′为调查结果中第(i-1)条车道上行进车辆的实际车速;Vi′为调查结果中第i条车道上行进车辆的实际车速;Si′为调查结果中变道车辆等待变道过程开始至完全驶入所变车道过程中的平均行驶距离;P为计算模型中采用的变道成功率;D′为调查结果中变道车辆在变道期的平均行驶距离。 表4 实例计算结果 通过对200名有高速公路行驶经验的驾驶员进行问卷调查和分析,结果显示,驾驶员行进在最内侧车道时,首次看到、第2次看到、第3次看到出口预告标志时便进行变道行为的比例分别为52%,42%,6%;所调查驾驶员在首次与第2次看到标志便进行变道的比例之和高达94%,可见首次看到、第2次看到出口预告标志的设置位置十分重要[13]。模型算出的最内侧车辆成功驶出高速公路所需的最小距离为:双向六车道为870 m,双向八车道为1 620 m。参考目前三级出口预告标志的设置方式并做调整,建议双向六车道的AGS分别设置在距出口2 000,1 000,500 m处,双向八车道的AGS分别设置在距出口250,1 500,500 m处。此种设置方法更能满足不同道路情况下高速公路分流区高效安全运行的需求。 6结论 本文建立了不同道路情况下高速公路出口前置指路标志安全距离计算模型。通过实例计算可知,设置AGS时,依照现行规范未考虑车道数、车道交通量、设计时速等会影响到驾驶员驶出高速公路的行为,因此不同道路情况下的设置方法依据相同的设置规范进行设置是不合理的。科学设置AGS将对提升高速公路分流区安全系数和分流能力起到重要推动作用。对现有车道进行改建时,例如进行车道增加、车道宽度拓宽等工程之后,对AGS设置位置进行重新计算并优化非常有必要,因此本计算模型在高速公路AGS设置初期与高速公路改建过程中均具有较大的应用和发展空间。 参考文献: References: [1]JTJ B01—2014, 公路工程技术标准[S]. JTJ B01—2014, Technical Standard of Highway Engineering [S]. [2]JTG D20—2006, 公路路线设计规范[S]. JTG D20—2006, Design Specification for Highway Alignment [S]. [3]GB 5768—2009, 道路交通标志和标线[S]. GB 5768—2009, Road Traffic Signs and Markings [S]. [4]Federal Highway Administration. Manual on Uniform Traffic Control Devices[M]. 2009 ed. Washington, D.C.: Federal Highway Administration,2009. [5]郭唐仪,胡启洲,姚丁元. 高速出口预告指路标志设置距离及其安全性能比较[J]. 公路交通科技,2011, 2011, 28(12):106-111. GUO Tang-yi, HU Qi-zhou, YAO Ding-yuan. Comparison of Placement Distances of Advance Guide Sign of Freeway Exit and Their Safety Performances[J]. Journal of Highway and Transportation Research and Development, 2011, 28(12):106-111. [6]刘伟铭,邓如丰,张阳,等. 高速出口前置指路标志的安全距离设置模型[J]. 华南理工大学学报:自然科学版,2013, 41(2):37-43. LIU Wei-ming, DENG Ru-feng, ZHANG Yang, et al. Setting Model of Safe Distance of Advance Guide Signs at Highway Exits[J]. Journal of South China University of Technology: Natural Science Edition, 2013, 41(2):37-43. [7]徐锦强,陈竹师,丁艺. 基于驾驶行为的车道变换模型研究及仿真[J]. 华东交通大学学报,2011,28(6): 68-72. XU Jin-qiang, CHEN Zhu-shi, DING Yi. A Model Study and Simulation of Lane Changing Based on Driving Behaviors [J]. Journal of East China Jiaotong University, 2011, 28(6):68-72. [8]张政. 排队论在高速公路收费系统中的应用[J]. 西安航空技术高等专科学校学报, 2006, 24(5):49-50. ZHANG Zheng. Queuing Theory’s Application in Express Way Charging System[J]. Journal of Xi’an Aerotechnical College, 2006, 24(5):49-50. [9]李洪强,徐慧智,程国柱. 车道变换行为特性研究[J]. 交通信息与安全,2009, 27(增1):54-57. LI Hong-qiang, XU Hui-zhi, CHENG Guo-zhu. Study of the Behavioral Characteristic of Lane-changing[J]. Journal of Transport Information and Safety, 2009, 27(S1):54-57. [10]刘伟铭,邓如丰,张阳, 等. 高速公路出匝分流区超车道车辆车道变换模型[J]. 公路交通科技,2012, 29(8):106-111. LIU Wei-ming, DENG Ru-feng, ZHANG Yang, et al. Vehicle Lane-changing Model for Overtaking Lane in Freeway Off-ramp Diverging Area [J]. Journal of Highway and Transportation Research and Development, 2012, 29(8):106-111. [11]Texas Transportation Institute. Sign Crew Fiekl Book: A Guide to proper Location and Installation of Signs and Other Devices [M]. Houston: Texas Department of Transportation, 2007. [12]LAN C J, LI J, CHIMBA E D. A Supplement to Advance Guide Sign Placement Guidelines in MUTCD [C/CD] // Transportation Research Board 85th Annual Meeting. Washington, D. C. : Transportation Research Board, 2006. [13]FINNEGAN P, GREEN A P. The Times to Change Lanes: A Literature Review [R]. Ann Arbor, MI: University of Michigan,1990. A Model for Calculating Advance Guide Sign’s Reasonable Setting Location at Expressway Exit CUI Hong-jun,MA Xin-wei,LI Xia,LI Lin,LI Hai-nan (School of Civil Engineering, Hebei University of Technology, Tianjin 300401, China) Abstract:In order to determine the reasonable setting location of AGS at expressway exit, the calculation model of AGS’s safety setting distance is established. The behavior of vehicle running out of expressway is divided into reaction period, lane-changing period anddeceleration period, and the safety identification distance of AGS and the lane-changing distance are focused on. With the establishment of the vehicle headway model and an investigation, the minimum vehicle headway in adjacent lane which makes it possible to change lane is analyzed. The distribution of the vehicles on special section is analyzed by probability theory and queuing theory. Then, with introducing the lane-changing success rate and fully considering the properties of drivers’ behavior, the AGS’s safety setting distances in different road situations are obtained at last. The actual example calculation shows the AGS safety setting distances of two-way six-lane and two-way eight-lane are 870 m and 1 620 m respectively, which are different in some degree from the current relevant specification of China. The result shows that the calculated AGS’s safety setting distances in various road situations are different,the current related specification of China need to be modified. Key words:traffic engineering; road traffic safety; calculation model; advance guide sign (AGS); reasonable setting distance; lane-changing success rate;minimum lane-changeable headway 中图分类号:U491.5+2 文献标识码:A 文章编号:1002-0268(2016)04-0120-07 doi:10.3969/j.issn.1002-0268.2016.04.019 作者简介:崔洪军(1974-),男,河北定州人,教授.(cuihj1974@126.com) 基金项目:河北省自然科学基金项目(E2013202228);河北省交通运输厅科技计划项目(R070245) 收稿日期:2015-04-20