卫星导航系统接收机原理与设计
——之五(下)
2016-05-16刘天雄
+ 刘天雄
卫星导航系统接收机原理与设计
——之五(下)
+ 刘天雄
4.5.1.2搜索空间
信号捕获(截获)的实质是一个在伪码域(不同的卫星)、伪码相位域(与信号传播时延有关)和载波频移域(与多普勒频移有关)上的一个三维空间搜索过程。GPS、Galileo和北斗卫星导航系统均采用CDMA码分多址(Code Division Multiple Access)信号技术,星座中所有导航卫星信号多路复用在同一个载波频率上,而每颗卫星对应一个唯一的伪随机噪声码(先验信息),即伪随机噪声码与导航卫星一一对应,并作为空间在轨卫星的唯一识别号SV number(Space Vehicle Number)。伪码确定后,则退化为一个在伪码相位和载波频移域上的二维空间搜索过程。
由于导航卫星在空间围绕其轨道作高速圆周运动,卫星与接收机之间存在相当大的相对运动而导致卫星播发的导航信号产生多普勒频移,为覆盖卫星高速运动所长生的预期中的所有多普勒频移,接收机一般需要需在±10kHz范围内搜索导航信号。捕获需要一定的时间,整个频率搜索带内可以分成若干个频率间隔,通常选定频率间隔为500Hz,这样在20kHz频段内就有41个不同的测试频率段。一般接收到的导航信号与本地复制伪码信号的相位也是不同的,如果接收机中的伪码相位步进是半个码片(chip),对于GPS L1 C/A码信号,整个短码相位的搜索需要2046次相关运算。以GPS系统为例,GPS接收机一般是同时进行伪码捕获与载波捕获的二维搜索,既要保证频率在搜索的误差范围(1kHz)之内,同时还要保证C/A码相位相差不到半个码片(Tc/2),这样才能保证搜索到卫星信号。导航信号搜索过程如图32所示。
接收机基于不同的“伪码延迟和多普勒频移对”(code delay / Doppler frequency pairs),接收机生成不同的本地复制PRN码(伪码)信号,然后分别与接收到的导航PRN码信号进行相关处理,当本地复制PRN码信号与接收到的PRN码导航信号“对齐”,即两个PRN码相位一致时,信号相关处理时将得到相关峰,导航信号捕获结果如图33所示(出现相关峰),与相关峰对应的伪随机码延迟量为650个码片(chips)、多普勒频移为-1750 Hz,“伪码延迟和多普勒频移对”被认为是对信号初始跟踪(tracking)过程的最优估计。
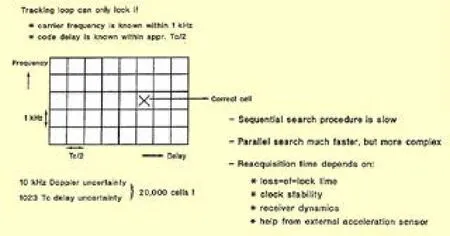
图32 导航信号的搜索过程
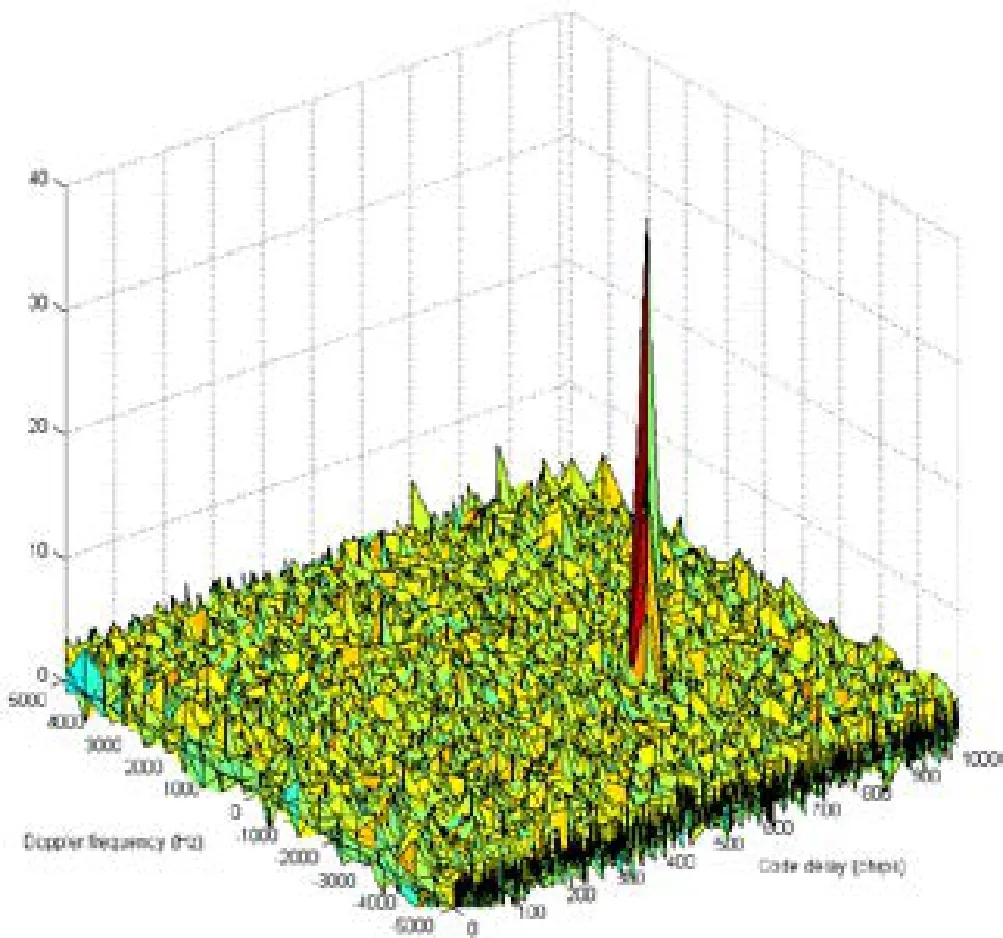
图33 导航信号捕获结果
接收机一般同时接收到多颗导航卫星播发的信号,每个导航信号具有不同的C/A测距码起始点和不同的载波频率(因多普勒移而变化)。接收机的每路基带信号处理通道同时只能处理一颗卫星播发的一路导航信号,捕获过程就是要找到信号中C/A测距码起始点和载波频率,为信号跟踪提供初始化条件。
4.5.1.3捕获算法
导航接收机在跟踪导航信号载波频率和伪码相位之前必须知道载波频率和伪码的粗略估计值,并且估计值必须小于锁相环PLL和延迟锁定环DLL的牵引范围,然后接收机才能对接收信号进行牵引和锁定,最后进入稳态跟踪状态。
为了跟踪上某颗导航卫星播发的信号,接收机必须搜索可见范围内的卫星(信号),如前所述,每颗导航卫星对应一个唯一的伪随机噪声测距码(简称测距码或伪码),接收机根据预先存储的所有导航卫星的测距码,通过相关处理,很容易找到这颗卫星信号的测距码,设置可见卫星的测距码后,接收机对导航信号的载波频率和伪码相位进行二维扫描式搜索,即导航卫星信号的捕获是一个伪码相位和载波频移域上的二维捕获过程,对导航信号的捕获过程,既要保证频率在搜索的误差范围之内,同时还要保证C/A码相位相差不到半个码片,这样才能保证搜索到卫星信号。
由于导航信号中存在噪声,信号所在单元(伪码延迟和多普勒频移对)的功率值有可能受到削弱,出现相关峰值的单元也不一定是最优估计,因而在一个搜索单元上获得一次概率值超过门限值时不能立即结束信号捕获过程,否则虚警率会偏高。从捕获到信号相关峰值到进入信号跟踪状态之间需要一个确认峰值的过程,这个过程就体现在捕获算法中,捕获算法有很多种,其中滑动相关法使用最为广泛,滑动相关法又有时域和频域两种算法。
(1)时域信号捕获算法signal acquisition in time domain
时域线性滑动相关捕获算法是常用的导航信号时域捕获算法,基于伪码相位和载波多普勒频移的二维线性搜索,以一个码相位和多普勒频移步长单元作为信号搜索单元格,在一次搜索过程中,需要考虑每一个可能的频率和码片延迟,通过相关处理得到相关功率峰值来不断地调整接收机本地生成的载波频率和伪码相位来实现本地复制信号和接收信号的匹配。
伪码相位和载波多普勒频移二维线性搜索策略一般有并行搜索、串行搜索和序贯估计三种,其中时域滑动相关捕获算法流程简单,硬件实现容易,目前大部分接收机都采用这种捕获算法,时域串行搜索流程如图34所示,但是当伪码延迟较大或者在高动态环境下,信号搜索时间过长,捕获速度较慢。
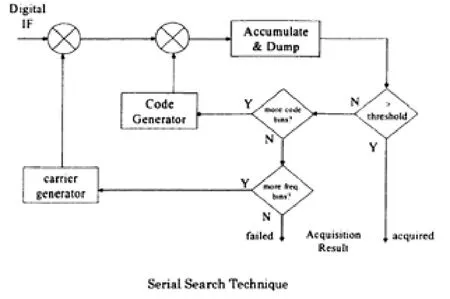
图34 导航信号时域串行搜索流程
时域线性滑动相关捕获过程为:根据可见卫星预测估算出多普勒频移搜索范围,选择搜索频域内范围内的中间点,在此频点下数字中频信号(digital IF)和本地载波产生的相互正交的I和Q两路分量相乘,以剥离载波,得到的两路信号再与本地复制的伪码相乘,以剥离伪码,输出I和Q两路相互正交的功率值。将一个伪随机测距码周期的两路信号积分累加得到非相干积分值,将I和Q两路非相干积分值平方求和即得到相干积分功率值,最后通过相干积分功率值与预先设定的捕获门限值来比较判断信号成功捕获与否。超过门限则为捕获到该卫星信号,否则移动到下一个搜索单元重复上述过程,直到搜索到功率峰值或结束对次颗卫星信号的搜索。门限是判定卫星是否可见的重要衡量标准,其门限值的确定对捕获来说是至关重要的。
(2)频域信号捕获算法signal acquisition based on FFT
频域并行捕获算法中,常用的是基于快速傅立叶变换(FFT)的频域圆周相关快速捕获算法,是适应高动态环境,可以大幅度减少伪码捕获时间的方案,即采用多普勒频移串行捕获,由FFT代替伪码滑动相关的二维并行捕获策略。根据快速傅立叶变换(FFT)的位置可以分为基于伪码相位域的FFT并行捕获算法和基于载波频率域的FFT并行捕获算法。
频域捕获算法的本质是在频域进行连续不断卷积,在某一个多普勒频率搜索单元开展所有伪码相位搜索,对接收到的导航信号中的测距码序列和接收机本地生成的测距码序列做循环卷积。根据信号在处理中的离散傅立叶变换圆周相关定理,如果将时域的循环卷积转换到频域完成,则只需对接收到的导航信号中的测距码序列和接收机本地生成的测距码序列分别作FFT处理,然后对其中的一组FFT序列做共轭处理,再将两者相乘,通过快速傅立叶反变换(IFFT),即可得到两个序列在所有相位上的相关峰值,原理如下:

信号长度为N的导航信号x(n)的离散傅立叶变换(DFT)为:

接收机本地复制信号h(n)与导航信号x(n)的相关函数可以表示为,其中,

相关函数z(n)的离散傅立叶变换(DFT)为:
然后对进行离散傅立叶反变换反变换(IDFT),即可得到相关函数z(n)的时域表达式,然后可以计算得到相关函数z(n)模的最大值,由此可以判定输入的导航信号x(n)与接收机本地复制信号h(n)的相关性在何时最强,这样就可以找到导航信号测距码的起始位置。
频域并行捕获过程为:根据可见卫星预测估算出多普勒频移搜索范围,选择搜索频域内范围内的中间点,在此频点下数字中频信号(digital IF)和本地载波产生的相互正交的I和Q两路分量相乘,以剥离载波,之后会得到I和Q两路信号,再与本地复制的伪码分别作相关处理,将I路作为实数部分Q路作为虚数部分,将这个新的数据(I+jQ)作FFT变换,变换结果反映了时域中信号相关结果I+jQ在各个频率成分处的强度,如果本地复制的测距码的相位与信号中测距码的相位不一致,则低相关性会抑制信号幅值,由此判定接收信号不再此码相位对应的搜索频带。频域并行伪码相位搜索流程如图35所示,
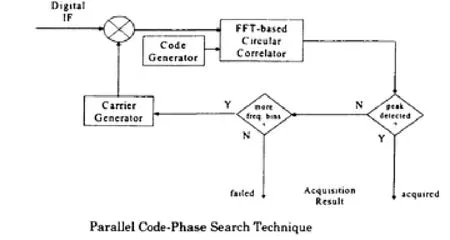
图35 导航信号频域并行伪码相位搜索流程
基于载波频率域的FFT并行捕获算法信号搜索流程如图36所示,数字中频信号(digital IF)和本地载波产生的相互正交的I和Q两路分量相乘,以剥离载波,得到I和Q两路信号与本地复制的伪码分别作相关处理,将I路作为实数部分Q路作为虚数部分,将这个新的数据(I+jQ)作FFT变换,接下来将数据取模求平方和,将所得的值与门限进行比较,大于门限的即可认为捕获到该卫星(信号)。
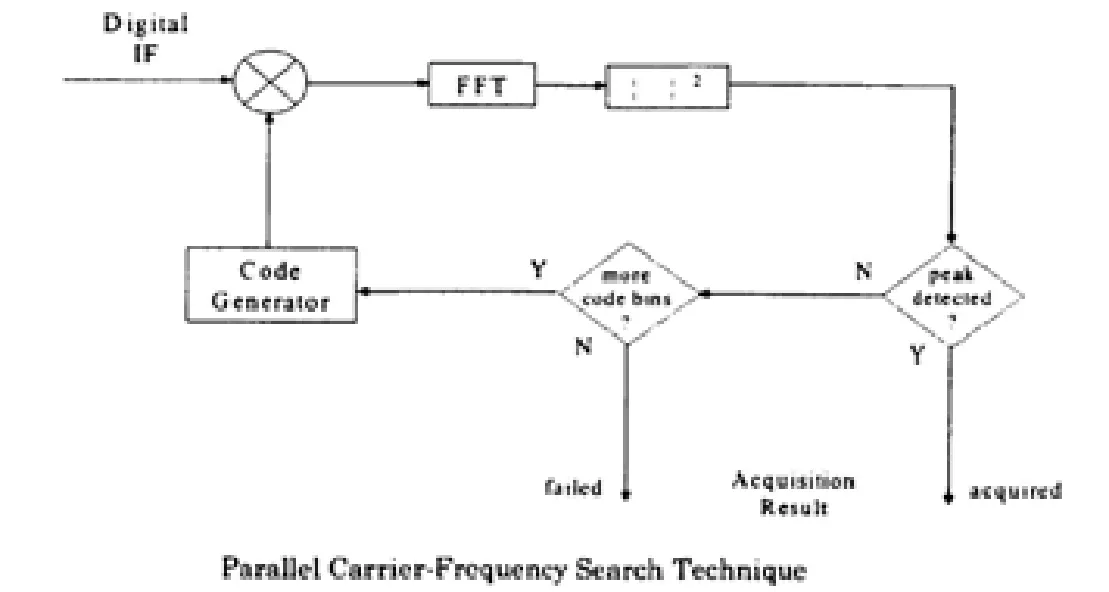
图36 导航信号频域并行载波频率搜索流程
论文选登
