手绘空间运行轨迹的3D四轴数控飞行表演系统及其应用
2016-05-16刘长荣张红强
刘长荣,张红强
(北京北特圣迪科技发展有限公司,北京 102300)
手绘空间运行轨迹的3D四轴数控飞行表演系统及其应用
刘长荣,张红强
(北京北特圣迪科技发展有限公司,北京 102300)
介绍3D四轴数控飞行表演装置应用于演艺领域的舞台表演功能,并详细阐述手绘空间运行轨迹的设置方法以及应用。
三维空间;四轴数控;载人飞行表演;手绘空间曲线;离线仿真
3D四轴数控飞行系统最早出现在欧洲,主要用于吊装摄像机,通常应用于大型演出、体育赛事、电影电视的拍摄,俗称“蜘蛛眼”,也称“三维飞猫”。
“蜘蛛眼”由控制台上设置的2个控制手柄控制,其中一个控制手柄采用十字速度控制手柄,可控制其“前”、“后”、“左”、“右”的运行方向和速度,另一个控制手柄用来控制其“上”、“下”的运行方向和速度,最大操控速度可达10 m/s。“蜘蛛眼”系统的操作方式,是由操作人员在现场实时手控“蜘蛛眼”的运行方向及运行速度,不需要、也不具备飞行曲线的事先编制、存储与调用运行功能。“蜘蛛眼”系统的承重为摄像机及附属设备,吊重有限。
近年来,随着演艺行业的飞速发展,尤其是大型旅游演艺秀场、杂技场等演出的大力推广,为3D四轴数控飞行系统的表演(也称3D威亚)创造了新的发展空间。3D四轴数控飞行装置用于吊挂演员或舞美装置,在3D演出空间作任意曲线的飞行表演是当下演艺界所追求的全新的表现方式。导演的创意往往要求飞行曲线是随心所欲的艺术创造,因此,手绘3D空间运行轨迹已经在多轴数控飞行表演系统中得以实现,新的创意理念及其实现必将大大推动该技术在演艺行业的广泛应用和长足发展。
手绘3D空间运行轨迹的方法,可使导演或操作人员在触摸屏上随心所欲地用手指或触摸笔徒手绘制3D空间运行轨迹成为可能。在平面上手绘空间运行轨迹,以及在3D坐标实时显示空间轨迹曲线,极大地满足了导演的艺术创意,可以实时直观地看到手绘的轨迹曲线在空间的显示效果,并可通过离线仿真和在线运行方式快速检验手绘空间曲线的实际表演效果。
1 系统概述
3D四轴数控飞行表演系统,是通过4台数控卷扬机分别设在表演区的4个角区,4个角区分别设置4个高空吊点,吊点采用水平随动式滑轮,滑轮会随绳索的偏移作水平转动,4台卷扬机的4根绳索(钢丝绳或其他非金属绳索)通过4个活动高空吊点滑轮结成1个吊点,表演区上空没有任何钢丝绳导轨。
4个卷扬机的下绳点位置可以是任意四边形,不受位置限制。在使用时,只要准确提供4个吊点位置相对于某一原点的三维坐标即可,但该原点一定要设置在下绳点形成的四边形里,也就是中心吊点能够到达的区域。
4台卷扬机通过实时控制完成吊点在三维空间的运动,由控制算法的实时计算确保4根绳索在吊点任何位置上的松紧一致。吊点的运动轨迹由软件控制吊点实现,运行曲线由软件编制,软件可存储及调用。
3D四轴数控飞行表演系统具有以下主要特点:
(1)表演区上空不设空中导轨
表演区上空各种设备交织,空间位置极其紧张。该系统的卷扬机及上空活动吊点均位于表演区两侧,不再占用纷乱的上空空间;
(2)采用V形吊点结构
三维系统采用双V形吊点结构,吊点在三维空间运行中具有很高的稳定性。
(3)采用伺服系统驱动
伺服系统(servomechanism)可使物体的位置、方位、状态等输出被控量随输入目标(或给定值)的变化进行自动控制,其主要任务是按照控制命令的要求,对功率进行放大、变换与调控等处理,使驱动装置输出的力矩、速度和位置控制非常灵活方便。
伺服系统经历了从最早的液压、气动到如今的电气化的发展历程,由伺服电机、反馈装置与控制器组成的伺服系统已经走过了近50个年头。如今,随着技术的不断成熟,交流伺服电机技术凭借其优异的性价比,逐渐取代直流电机,成为伺服系统的主导执行电机。伺服系统的发展趋势即高精度、高速度、大功率,具有运行平稳、精确、可靠,系统反映速度快等优异的动静态特性,其性能在各种驱动系统中具有领先的地位。
(4)采用多轴数控技术
数控技术简称数控(Numerical Control),即采用数字控制的方法对某一工作过程实现自动控制的技术。它所控制的通常是位置、角度、速度等机械量和与机械能量流向有关的开关量。
数控技术的应用不但给传统制造业带来了革命性的变化,使制造业成为工业化的象征,而且随着数控技术的不断发展和应用领域的扩大,对其他一些重要行业的发展起着越来越重要的作用,因为这些行业所需装备的数字化已是现代发展的大趋势。
数控系统分为单轴和多轴数控系统,本系统中采用四轴数控系统。数控系统在该系统中通过应用软件完成多轴之间的协调运行,实时控制其多台伺服驱动系统运行的速度、位置、转矩等参数的快速响应,达到在三维空间的作各种曲线的飞行表演的运行。
(5)手绘的空间运行曲线
手绘是指用手指徒手在触摸屏上绘制空间运行轨迹的一种新型的设置方式,通过手绘的方式可以实现运行曲线的多样化、任意化、简单化和快速化。
2 系统构成
3D四轴数控飞行表演系统一般由机械部分和控制部分组成。机械部分主要由4套自排绳式卷扬机及绳索吊点装置组成。自排绳式卷扬机的主动排绳机构选用单点吊机常用摇臂式排绳,通过电机减速机的转动将带动索绳从卷筒的一端移向另一端,由于绳索经过可灵活摆动的摆臂,使其在卷筒上排绳时始终沿着卷筒切线与卷筒成90°角,达到主动排绳的目的。控制部分主要由伺服驱动系统、四轴数控系统、智能操控系统以及系统软件等部分组成。
三维运动控制系统由四轴控制器和4套伺服驱动器组成。4套伺服驱动器分别驱动4台伺服电机,4台伺服电机上均装有绝对值光电编码器和制动器。编码器检测伺服电机的转速和吊点移动的位置。吊点位置由控制器根据数学模型实时计算出4台电机的实时运行的速度和位置。相互配合使吊点在垂直有效的平面内作任意曲线的运行。吊点速度、位置由主控制台编程控制。系统操控手段决定使用的完美与可靠,系统中不仅具有手动三维任意操控功能,更具有智能化的屏幕运行轨迹软件包的编辑、存储、调用功能及编场(CUE)功能,适宜不同的演出表演的需要。

图1 3D四轴数控飞行表演控制系统
3 控制算法
3D四轴数控飞行表演系统的四轴控制,最终是控制4台卷扬机的实时绳长和实时速度。假设4台卷扬机滑轮吊点分别为A、B、C、D,其滑轮吊点的3维坐标分别为A(x、y、z)、B(x、y、z)、C(x、y、z)、D(x、y、z),运动吊点M(x、y、z)运动位置见图2,图中A(x、y、z)、B(x、y、z)、C(x、y、z)、D(x、y、z)分别表示A、B、C、D点(滑轮)的原始物理位置。
对应滑轮吊点A、B、C、D的卷扬机计算绳长(单位:mm)分别为La、Lb、Lc、Ld,由(公式1)、(公式2)求得,式中,La(m)、Lb(m)、Lc(m)、Ld(m)分别表示A、B、C、D各吊点的绳长控制量(单位:mm)。

对应滑轮吊点A、B、C、D的卷扬机计算速度(m/ s)分别为Ua、Ub、Uc、Ud,由(公式3)求得,式中,Ua、Ub、Uc、Ud分别表示A、B、C、D卷扬机速度(单位:m/s)。

吊点速度U(单位:m/s)由(公式4)求得,式中:t表示采样时间t越小,控制运行曲线精度越高;L表示采样周期间隔的两点之间的距离,L的大小决定舜时速度。速度U受伺服电机最高转速的限制。

4台卷扬机滑轮吊点A、B、C、D在(x、y)坐标位置是四边形。在实际应用中,受空间位置的限制很难做到理想的矩形,运动吊点在四边形之内作水平面运行。滑轮吊点的高度也不可能要求一致,但最低的高度限制了运动吊点的上升高度。由于受拉力角度的限制,上升高度还要留有一定的裕量。滑轮吊点安装确定后,吊点相对于原点的坐标必须测量准确。

图2 运动吊点M(x、y、z)的运动位置图
4 空间飞行轨迹
3D空间飞行的运行轨迹的设置有两种方案,包括空间轨迹函数方程法设置方案和空间手绘法设置方案。
4.1 空间轨迹函数方程法设置方案
空间轨迹函数方程设置方案是传统的设置方案,是在平面上或空间中取定了坐标系之后,平面或空间就与有序实数组(x,y)或(x,y,z)建立了一一对应的关系。在此基础上,进一步建立作为点的轨迹的曲线与其方程之间的联系,把研究曲线的几何问题,归结为研究其方程的代数问题,从而为用代数的方法对一些曲线进行研究应用于空间轨迹的运行。
一般用于舞台演出的运行轨迹,可通过空间直线、圆弧、同心圆、椭圆等之间很有限的几个标准元素的连接,组成表演的空间运行轨迹。实际上,舞台表演要求的空间轨迹并不要求精确,运行的轨迹过后是不留痕迹的,大空间的轨迹运行的曲线轨迹不需要完美,观众是看不出来的。导演在排练创意空间运行轨迹的表演是不注重圆弧是否精确,更在乎空间运行轨迹的变化,甚至希望随心所欲以及运行曲线的多样、简便和快速的设置。
以上的空间运行轨迹设置比较复杂,也不能满足任意变化的曲线设置要求,因此,一种以手绘方式设置空间运行轨迹的方式满足了导演的要求。
4.2 空间轨迹的手绘法设置方案
手绘的创意是在触摸屏上通过人的手指或触摸笔徒手在X(表演空间正面宽度)-Y(表演空间纵深)平面坐标系上绘制水平投影曲线,并在Z(表演空间高度)-W(沿水平曲线展开的长度)立面坐标系上绘制垂直高度曲线,进而经软件合成3D空间曲线,实时显示在X-Y-Z(3D)坐标系上。
4.2.1 水平面曲线手绘的方法
在X-Y平面坐标系上徒手绘制目标空间曲线在水平面的投影形成的水平面曲线,X为横坐标,即表演空间正面的宽度,Y为纵坐标,即表演空间的深度。已绘制完成的水平曲线系统将自动生成离散节点,并实时在3D坐标系中自动生成显示0高度的水平面曲线,见图3。
4.2.2 垂直面曲线手绘的方法
垂直面曲线有两种设定方法,一种是在Z-W立面坐标系上徒手绘制水平曲线展开的线的高度值曲线,形成垂直面曲线。Z为纵坐标,即表演空间高度;W为横坐标,即沿已设定的水平曲线展开的长度。手绘的垂直高度将自动在3D坐标系中实时将已绘制完成的水平面曲线从0高度拉至设定位置,见图4。
另一种方法不是通过手绘,而是通过屏幕上设置的推拉杆或外部直线电位器手控操作设定高度,通过动点以设定的速度在0高度水平曲线从起点到终点在3D坐标系中移动,动点的移动实时将已绘制完成的水平面曲线从0高度拉至手控即时设定的位置,速度快慢可设定,手动实时高度值将被记忆,见图5。
4.2.3 运行速度曲线手绘的方法
速度曲线有两种设定方法,一种是在U-W坐标系上徒手绘制目标速度曲线。U为纵坐标,即运行速度;W为横坐标,即沿已设定的水平曲线展开的长度。

图3 水平面手绘曲线
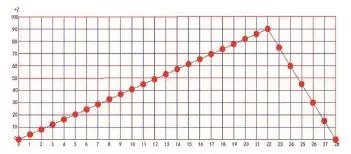
图4 垂直面手绘曲线

图5 垂直面即时手控高度曲线
另一种方法是通过屏幕上设置的推拉杆或外部直线电位器手控操作速度设定,通过动点在3D坐标系中以时间轴实时将已绘制完成的空间曲线从起点位置向终点位置按即时手控速度移动手动实时速度值将被记忆,见图6。
4.2.4 四维(X、Y、Z、U)动态空间曲线的合成(4D)
水平面曲线与垂直面曲线可合成为3D的静止空间曲线,随着速度值的加入,在X-Y-Z(3D)立体坐标系中可合成为4D的动态空间曲线,见图7。
4.2.5 离线仿真功能
手绘的空间曲线可以在3D坐标系上作离线仿真,手绘的带有采样点的空间曲线的运行速度可以预先设置,也可以实时操控。系统软件自动计算生成运行所需时间,也可以实时手控,手控通过屏幕上设置的推拉杆或外部直线电位器手动操作。离线仿真的另一种方式,是在3D坐标系上只显示水平面曲线,垂直曲线的实时高度值可以通过屏幕上设置的高度推拉杆或外部直线电位器手动操作。
离线仿真时,手绘的曲线为绿色,仿真运行时的曲线为红色。仿真启动后,红色曲线按设定的速度曲线或手动实时速度值运行,红色曲线在运行中逐步覆盖绿色曲线,覆盖重合度为检验运行与设定曲线的偏差度。3D坐标系下端设有实时动态时间码和实时3D坐标,仿真运行时动态时间码进行累加计数。
4.2.6 在线运行检验功能
启动控制系统设备,使设备初始化,吊点运行至原始位即0位,计算机将检测点编码组序列下载至数控飞行表演装置吊点运行。实际吊点运行的检测数据(吊点位置)将实时传送至计算机,并在3D坐标系上实时显示实际吊点运行的空间轨迹。红色轨迹在实时运行中逐步覆盖绿色曲线,覆盖重合度为检验运行与设定曲线的偏差度。
4.2.7 特定空间曲线软件包功能
特定空间曲线是按需求编制的几种常用的空间曲线,不需绘制,只需调用软件包编号,经相关参数设置及可完成复杂的编制过程,省时快速,运行准确。
(1)水平圆垂直正向/反向旋转曲线软件包,见图8。
(2)垂直圆水平正向/反向旋转曲线软件包,将图9。
(3)水平圆垂直螺旋上升/下降曲线软件包,见图10。

图6 速度手绘曲线及手控即时速度

图7 3D曲线合成

图8 水平圆垂直旋转曲线

图9 垂直圆水平旋转曲线

图10 水平圆垂直螺旋上升/下降曲线

图11 水平正/负宝塔圆垂直螺旋上升/下降曲线

图12 旅游剧场演出《家·源》
(4)水平正/负宝塔圆垂直螺旋上升/下降曲线软件包,见图11。
5 结语
3D四轴数控飞行表演系统主要用于载人飞行表演,对载人飞行的表演有以下四点要求:
(1)对演员飞行过程中的安全性的要求:对安全的要求历来都是首位的,尤其是人身的安全更为重要,在系统安全设计及设备选型配置上要高度重视。
(2)对系统运行的可靠性的要求:可靠的运行是系统的基本要求。
(3)对演出的艺术效果的要求:对于演出的艺术效果则取决于飞行轨迹的多样化、
(4)对飞行轨迹的编制的要求:飞行轨迹的编制要随意化、简单化和快速化。
3D四轴数控飞行表演系统为科技部国家支撑计划课题“四度空间”杂技舞台机械系统的开发与集成应用的科研项目,在吴桥杂技大世界和河源旅游剧场演出《家·源》等演出中得到良好的应用,见图12。
随着艺术与技术的不断进步,大吊重、高速度、大跨度、高安全可靠的手绘空间轨迹的3D四轴数控飞行表演系统,将在旅游演艺、影视片场等演出中得到广泛的应用,新的技术手段将助力演艺事业的发展。
刘长荣,北京北特圣迪科技发展有限公司董事长、河东北特企业总裁;资深航天及舞台自动控制专家、高级工程师、全国注册电气工程师;《演艺科技》杂志编委;中国载人航天工程发射场自动控制系统总设计师;第29届奥运会开闭幕式、第13届残奥会开闭幕式舞台机械控制系统专家。
(编辑 薛云霞)
3D Four Axis Numerical Control Flying Performance System and Its Application in Hand Drawn Space Trajectory
LIU Chang-rong, ZHANG Hong-qiang
(Beijing North Special Technology Development Co., Ltd., Beijing 102300, China)
In this paper, the author introduced the application of the 3D four axis numerical control flight performance device in the performing arts field, and described the method and application of the hand drawn space trajectory.
three dimensional space; four axis numerical control; manned flight performance; hand drawn space curve; off-line simulation
10.3969/j.issn.1674-8239.2016.04.008
