浅淡国内首台深水波浪补偿克令吊的补偿技术系统
2016-05-14宣强朱镇
宣强 朱镇

摘 要:随着国内对海洋资源不断的深入开发,各类工程船舶、海洋钻井平台越来越多的进入到深海区域进行海上作业,受深海区域波浪起伏的影响,海上作业时会随着波浪晃动,船体晃动则直接导致水下起重机的吊钩不稳,增加海上作业困难,影响水下的安装作业。上海振华公司自主研发的国内首个深水下主动波浪补偿甲板起重机,填补了国内在主动波浪补偿设备领域的研发空白,打破了国外的技术垄断,以提高海上作业的安全性、高效性和可靠性。
关键词:主动波浪补偿;二次液压控制;信号检测;控制算法
中图分类号:TH137.7 文献标识码:A 文章编号:1006-8937(2016)14-0008-02
深水波浪补偿克令吊是上海振华公司为提高公司海工产品核心竞争力,进一步提高海工产品自主创新能力和高附加值,在国外公司技术严密封锁,无任何参照系统资料的情况下,历经4年自主研发的一台具有国内最先进深水环境下主动式波浪补偿技术的新型甲板起重机,是国内第一台真正意义上的带主动波浪补偿功能的起重机产品,可广泛应用于水下600 m以内的海上补给、海洋钻井、有缆海底机器人安装作业、深海探测等。
1 本项目补偿技术系统说明
升沉补偿系统是海洋工程作业安全进行必不可少的装置,气液运动补偿器和张紧器是海洋浮船和半潜式平台广泛采用的两种升沉补偿系统。升沉补偿系统的分类的方法比较多。按动力供应分按其动力供应来分,升沉补偿系统可分为:主动型升沉补偿系统(Active Heave Compensation System,AHCS)、被动型升沉补偿系统(passive Heave Compensation System,PHCS)、主动型与被动型升沉补偿系统相结合的半主动型。
振华公司设计团队前期自主研发了油缸配合蓄能器的波浪升沉补偿实验台,该试验台的补偿吊重为1 T,模拟的波浪高度为±1 m;周期为10 s,通过检测和调试,从而获得波浪补偿系统运行工况的大量实验数据;首台波浪补偿克令吊正是以此为基础,通过理论创新和消化吸收国外先进技术等技术积累手段,对深水环境下波浪补偿系统的技术瓶颈进行技术攻关,研制一种带主动波浪升沉补偿系统的,满足深水环境工作的新型起重吊机, 使该产品能够满足市场上通用的定位精度要求,最终打破国外的技术垄断,实现波浪补偿装备的国产化并进行产业化推广, 最终形成具有自主知识产权的波浪补偿设备设计与生产制造能力,设计制造水平达到国际先进水平为主要研究目标。
首台波浪补偿克令吊具体补偿技术系统说明如下。
1.1 主动波浪补偿系统结构
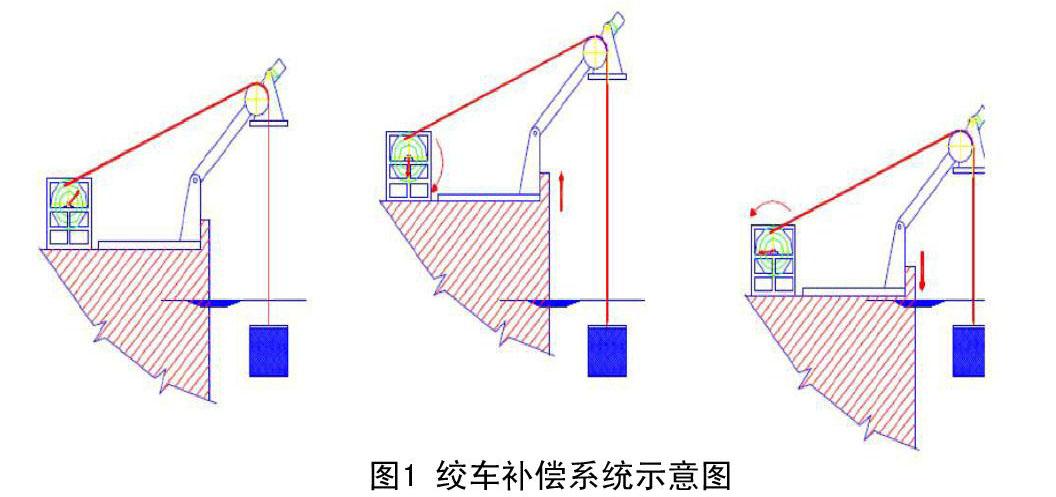
主动波浪补偿克令吊采用的绞车补偿结构方式,如图1所示。
主动绞车补偿系统只需要控制绞车卷筒即可,不需要额外增加其他的机械和液压装置,可以节省有效的船舶空间。但是采用该方法,绞车惯性很大,需要实时的进行控制,消耗功率较大,同时对被动补偿系统不方便设计。
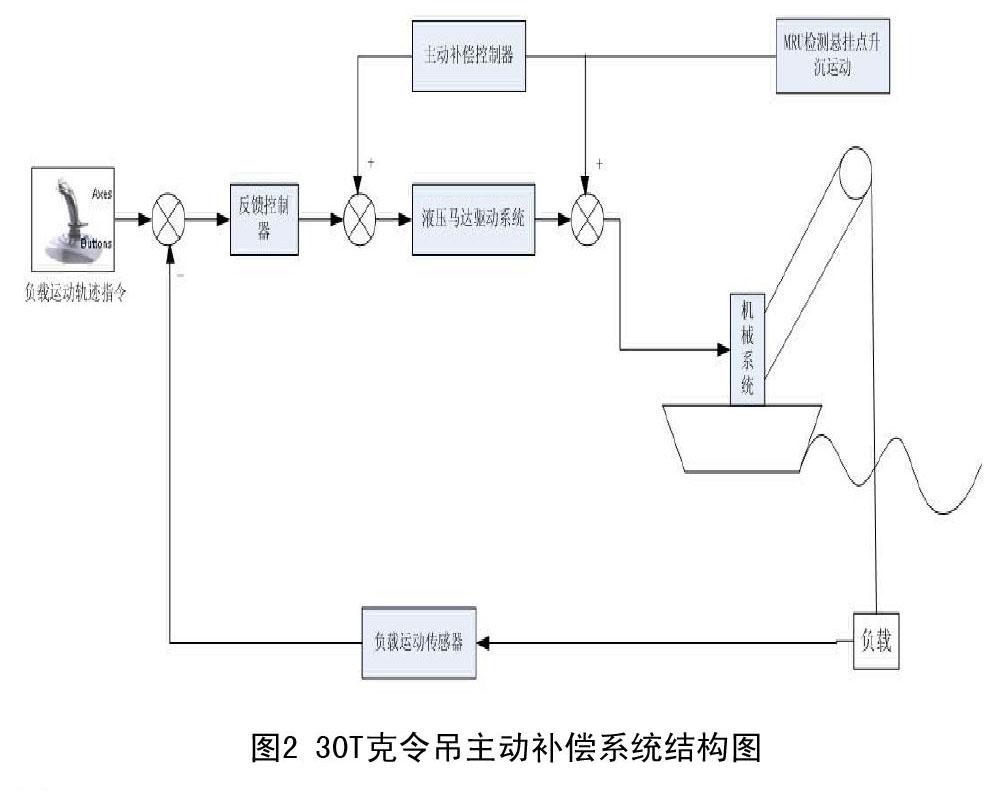
本克令吊主动升沉波浪补偿系统包括:起升卷筒、船舶姿态运动传感器、绝对值编码器和补偿设备。起升卷筒安装在起重机上,起升卷筒通过钢丝绳绕过起重机的支臂前端的悬挂支点吊装一负载,负载浸没于水面下。船舶姿态运动传感器固定于固定基座上,船舶姿态运动传感器实时检测船舶升沉运动。绝对值编码器安装于起升卷筒上,绝对值编码器实时检测起升卷筒的运动状况。如图2所示。
1.2 二次液压控制技术
本克令吊的主动补偿液压方面是采用博世力士乐最先进的二次液压控制方案技术,这也是针对AHC的独特的应用。如图3所示。
波浪补偿克令吊主起升卷筒采用由五个力士乐具有高响应速度的液压二次马达驱动。采用液压系统中先进的二次调节技术,本克令吊起升装置可以工作于如下工作模式下,分别为:“吊机普通模式”、“吊机空钩模式”、“恒张力模式”、“波浪补偿模式”、“手动维修模式”,以上五种控制模式可以通过按钮在操作面板上选择和切换,绞车在任何时刻只能选定一种操作模式。
有关主动恒张力调节也是通二次控制马达来实现,正因为是压力耦合系统,在主动恒张力微调时便可以在很短的时间内作出反应,另外动力站的压力阀是电比例阀,所以系统压力量是可在不同的负载情况下进行无级调节。当然我们会将工况分成几个等级,从而调节压力,一个可调的近似恒压系统,再加二次控制是目前最先进的配置,没有二次控制马达,高精度的操控是做不出来的。
波浪补偿克令吊液压系统有:主起升,回转,变幅机构。每个机构的运行由司机室的电控手柄进行控制。每个机构每次运行的启动和停止都必须经过设定的斜坡(除紧停外)。在司机室内需要显示的液压系统的状态有:油温,油位,制动器,泵最底变量压力(10 bar),整个系统待机等,具体见各工况。
1.3 信号检测系统
检测系统由高性能船舶姿态传感器MRU(Motion Reference Unit)及数据处理单元构成,实现船舶姿态运动、钢丝绳张力以及重物位移、速度等信号的实时检测。船舶姿态运动传感器以固定采样周期采集预定时间段内的船舶升沉运动位移数据,补偿设备对船舶升沉运动位移数据进行频谱分析获得船舶升沉运动位移数据的功率谱,补偿设备对功率谱进行谱拟合与参数化并建立船舶升沉运动的状态空间模型,该状态空间模型作为船舶升沉运动的历史数据。
1.4 电气控制算法
电气系统方面运用时滞参数辨识原理对系统时滞参数进行辨识,由于主动波浪补偿系统是一个大惯量、滞后、参数时变的非线性系统。主动波浪补偿要想达到一定的控制精度,就必须采用相关的智能控制算法,从而解决时滞后性、钢丝绳弹性以及系统阻尼等因素的影响,通过分析主动式波浪补偿系统的时滞主要是在液压系统、机械执行系统中产生的。如图4所示。
进行主动升沉补偿预测控制算法研究,消除液压绞车大惯量、滞后、参数时变等非线性因素对主动升沉补偿控制性能的影响,在液压绞车功率允许的前提下提高主动升沉补偿效率,同时,在控制算法的过程中,必须将钢丝绳弹性因素和水下负载的阻尼纳入考虑范围中,从而进行有效的主动补偿控制。高性能数字控制器实时读取MRU数据,进行扰动前馈控制,得到扰动前馈控制电压为uforward。读取卷筒绝对值编码器和张力传感器数据,进行动力学模型计算,通过与操作手柄的控制指令信号进行比较分析,利用位移偏差信号进行不完全微分反馈控制算法,决策出反馈控制电压ufeedback,控制器通过数模转换器,输出总的控制电压u=uforward+ufeedback,将此控制电压输出到马达驱动器,从而驱动卷筒转动,进行主动升沉补偿。
2 结 语
本文简要阐述了上海振华公司自主研发首台波浪补偿克令吊采用的主动补偿技术系统的组成,从文中可以看出,对于船舶在波浪起伏的海上作业时,波浪补偿技术在增强安全性和可靠性的前提下,大大增加了高效作业,公司首台具有波浪补偿经功能克令吊的研制成功,标志着我国在海波浪补偿技术及设备方面的突破,为今后国家开发深海资源战略提供有力的技术保障。
参考文献:
[1] 蔡东伟,刘荣华,张作礼,等.一种主动升沉补偿波浪控制系统研究[J].船 舶工程,2012,(S2).
[2] 徐小军,陈循,尚建忠.一种新型主动式波浪补偿系统的原理及数学建 模[J].国防科技大学学报,2007,(3).
[4] 陆卫杰.船艇并靠导弹补给及波浪补偿系统研究[D].南京:南京理工大 学,2006.
[5] 杨文林.有缆水下机器人主动升沉补偿技术研究[D].沈阳:中国科学院 沈阳自动化研究所,2009.
