ETC车道识别车牌存储错位的解决策略研究
2016-05-14李淼
李淼
摘 要近年来,交通运输行业蓬勃发展,ETC车道得到了广泛的使用。这极大的减轻了劳动强度,节约了大量的成本,但是也出现了大量的超载超限车辆,本文针对这一现象进行了深入的研究。
【关键词】ETC车道 车牌识别 解决方案
ETC系统在高速公路的广泛应用,确实为人民生活带来了快捷的通行体验,大大提升了交通收费站的通行能力和交通服务水平。但是近年来,我国车辆数量不断增多,ETC车道的流量逐渐增大,也暴露了一系列的问题,以车辆换卡或换电子标签方式逃费的现象最为典型。确认逃费需要依靠车牌识别手段,一方面需要识别、对比车牌和卡内车牌,锁定信息不一致的车辆,另一方面需要人工进行最终的逃票判断。众所周知ETC车道是没有工作人员值守的,所以在实际的车辆通行过程中,识别的车牌与实际的车辆信息不匹配,出此案错位的现象。因此针对解决错位问题的研究具有很重要的现实意义。
1 ETC车道探究
1.1 车道布局
车牌错位现象主要受车道布局中的触发线圈和抓拍线圈的影响,按照一般的车道布局设置,触发线圈的位置是由天线的位置决定的,而抓拍线圈的位置与摄像机的位置有关。当行驶车辆进入到触发线圈,便能立即启动天线,与电子标签和CPU卡进行通讯,进行交易。继续前进,当车辆驶入抓拍线圈。很明显,触发线圈和抓拍线圈位置的确定参照不同的设备,所以,ETC车道两个线圈的距离,通常小于2米。
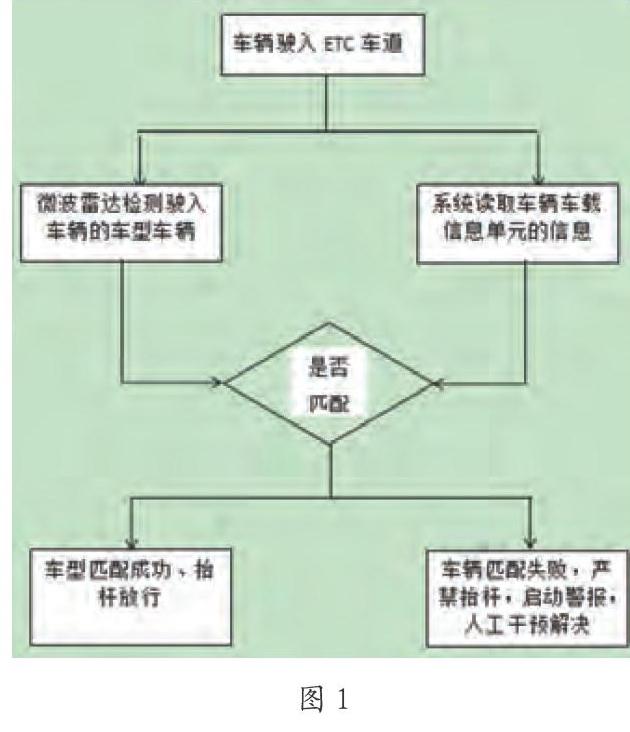
1.2 ETC系统结构分析
如图1所示。
2 错位现象分析
从上文车道布局中可知,车辆先经过触发线圈,在经过抓拍线圈,这也决定了进行交易和抓拍车辆的先后顺序。因为ETC系统交易记录采用的是直接传输,交易成功后,需要经历储存、检索才能上传,这便造成了车牌识别错位。此外车辆的交易速度要快于车牌识别仪的处理速度,这也是车牌识别错位的另一个影响因素。
2.1 系统处理分析
正常情况下,车辆经过触发线圈,启动天线,搜寻区域内的电子标签,进行交易,交易中会触发抓拍事件。交易完成后,正确识别车牌发生在交易记录信息储存之前。
大部分异常情况是由于识别车牌信息提前造成的。第一种情况,当前车辆在触发抓拍之前完成了交易,车牌识别仪没有识别出车辆,而交易信息已经被系统储存。车辆继续前进触发抓拍,识别仪开始运行,将车牌信息传送至系统,保存在内存变量中。下一辆车一旦在触发抓拍之前完成了交易,此时内存中上一辆车的信息会存储到当前车辆的交易记录中,最终造成了车牌错位。持续下去会造成连续的识别车牌错位。第二种情况,当上一辆车误闯入车道倒出时,车牌会被识别并储存,上述过程又会发生,造成车牌识别错位。
2.2 触发线圈和抓拍线圈的相对位置
综上所述,避免车牌识别错误,就要保证车辆在完成交易前触发抓拍,所以车辆经过触发和抓拍线圈的时长要符合下面的关系:
t=L/v (1)
T:车辆经过触发和抓拍线圈的时长
L:触发线圈和抓拍线圈之间的距离
v:车辆的行驶速度
根据ETC车道布局的设置,两个线圈之间的距离大都大于2m,以临界值2m计算。线圈设计宽度一般为1m。所以触发线圈和抓拍线圈之间的距离为3m,即L=3m。根据数据统计分析,超过百分之九十的车辆成功交易保持在300ms,带入公式(1),可得行驶速度为36Km/h。所以车辆通过ETC车道的行驶速度低于36Km/h,必定造成识别车牌错位。
3 解决方案研究
3.1 硬件设备调整
3.1.1 可以将抓拍线圈调整到触发线圈之前
因为车牌识别错位的就是抓拍线圈在触发线圈之后造成的。所以可以将车牌识别的过程向前调整,与触发天线开启同步进行。本文踢到过车牌识别处理需要的时间稍长,大部分的车牌识别时长大于300ms,但是大部分车辆的交易时间要小于300ms,所以此种方案不能彻底解决ETC车道识别车牌错位的现象。
3.1.2 可以缩短触发线圈和抓拍线圈的间距
根据关系式(1)的变形公式:L=vt,假设最慢速度为20Km/h,因为大部分车辆的交易时间在300ms内,可以计算得出,L=1.65m。所以触发线圈和抓拍线圈的间距最短可以为0.65m。这和第一种方法虽然可以避免车辆识别错位,但是此种方案,需要调整设备间距和摄像头的焦距,会耗费大量的花费,不建议采用。
3.2 软件优化升级
在对错位现象分析的中提到车牌识别处理时间较长是造成识别车牌错位的关键原因,可以改变ETC记录信息从本地直接传输服务器的方式,采用信息记录中转传输方式,在中转文件的过程中拉长记录上传时间,从而避免识别车牌错位的现象。基本流程如下:
不管车牌识别仪的处理过程和交易记录储存过程的时间顺序,交易信息都会被既定的格式储存到本地的中转文件中。在此之前,上一条中转文件的交易信息会被转存到传输文件内等待上传,中转文件中上一条信息将被清除,等待当前车辆本地交易记录的上传。
基于交易记录在中转文件中暂存的情况,在车牌识别仪识别车牌完成,并传送到系统后,系统需要对中转文件进行判断,若中转文件内有记录信息,但是记录信息显示车牌信息完整,说明识别车牌过程出现在交易过程之前,识别车牌已经完成在记录中的储存,反之信息为空,说明交易发生在车牌识别过程,出现车牌识别错位,需要把车牌信息更新为当前车牌。
4 结语
本文基于现在ETC车道布局和系统结构的基本情况,通过车牌识别错位这一问题的研究,为解决车牌识别错位提出了两项解决方案,从实际角度出发,通过硬件的调整来解决问题的方法不太可行,所以不建议采取此类方法。而通过系统软件的优化升级和调试改进,为提高车牌识别成功率有很大的帮助,基本上可以满足稽查需求。希望对ETC车道识别车牌存储错位的解决有所帮助。
参考文献
[1]李楠,陈波,韩海韦.基于机器视觉的车道标志线检测研究[J].东南大学学报(英文版),2004.
[2]杨耿,段作义.ETC多车道自由流路径标识站探析[J].中国交通信息化,2015.
作者单位
唐山市交通运输局 河北省唐山市 063000
