一种基于STM32的带轮多参数检测仪设计
2016-05-14龚阳波


摘 要本文设计了一种基于STM32单片机的带轮多参数检测仪,利用多路电感式及气动传感器,搭建了检测仪的基本机械结构和电气控制方案。测量高效可靠、安全性好、操作简便,为现行工厂汽车电动助力驱动带轮的多参数检测提供了可靠途径,具有重要的现实意义。
【关键词】STM32单片机 多参数 电感及气动传感器 电气控制
1 前言
本论文介绍了机械平台方案及原理设计、传感器信号处理和采集电路、以STM32为核心的电磁阀、步进电机等外围硬件驱动电路设计。
2 机械结构方案及测量原理
被测带轮安装于气动塞规上,步进电机驱动塑胶小齿轮与被测带轮啮合传动。塑胶齿轮压紧被测带轮,被测带轮与气动塞规的贴合面作为测量基准。带轮在塑胶轮的啮合下转动一周,位于横轴、纵轴的电感式传感器以及塞规内的三组气动测头按一定时间间隔在工件上连续采样。气动塞规内安装的三组气动测头用于检测内径等信息,带轮轴向和径向垂直安装的三组电感式位移传感器用于测量带轮高度、外径、平行差、外圆跳动等参数。
3 硬件电路设计
3.1 信号处理电路设计
通常,传感器输出信号具有种类多、信号微弱、易衰减、易受干扰等特点。故而信号需经过一些预处理、信号的调制与解调、信号的非线性校正、信号的限幅或放大、滤波处理、阻抗匹配、AD转换等,从而滤除传感器信号的高频分量、提高传感器信号的抗干扰能力、使输入级的输入阻抗和传感器的输出阻抗相匹配。本文最终设计的信号处理电路如图1所示。
3.1.1 限幅电路设计
本部分设计电路中利用5.6V的稳压二极管1N4734和串联200Ω电阻的方法将输出信号钳制在-0.7V和5.6V之间。1N4734稳定电压UZ为5.6V,在2.0V反向工作电压下,其最大漏电流为10uA。以第一路传感器信号处理电路为例,本设计中R88取值为200Ω,此时由于漏电流在R88上产生的压降Ur约为2mV,几乎可以忽略,若取值过大,势必造成传感器信号的更大衰减。当传感器输出最大电压Um达9V时,此时R88上压降约为3.4V,R88通过的最大电流Im约为17mA,可由公式(1)计算得出。
Im=(Um-UZ)/R88 (1)
由式(1)可知,当R88过小时,二极管稳压状态下,其通过的电流势必增大,而这电流由传感器内部提供,长期过载使用会减小传感器使用寿命,更甚者会直接烧坏传感器。
3.1.2 分压和滤波电路设计
在限幅电路中,R88作为限流电阻存在,同时由于分压电路的设计,其也作为分压电阻的一部分而存在。故本部分设计电路中,分压电路是有电阻R88、R1、R3和可调电阻R7构成的。已知要求分压系数K=0.6,分压电阻的计算公式如(2)所示。
K=(R3+R7)/(R88+R1+R3+R7) (2)
最终分别取R1=47K,R3=68K,R7=5K,R7可调电阻用于微调分压系数。由于电阻用于传感器的精确分压以及测量系统工业环境的应用,对分压电路的电阻精度和温度特性要求很高,R1和R3在此均使用0.1%的阻值误差,10个PPM的超低温漂系数,并联的钽电容C3用于滤除传感器信号的高频干扰。
3.1.3 跟随电路的设计
跟随电路中,电压串联负反馈且反馈系数为1,故Uo=Ui。MAX44251采用专有的自相关归零技术,直流失调和偏移接近于零。电压跟随器在这里的作用是阻抗变换作用,一方面,将输入阻抗变得很高,另一方面,输出阻抗变得很低,AD输入阻抗对跟随电路的输出信号的影响可以做到很小。
3.2 阀门驱动电路设计
电磁阀的开关决定气缸的执行动作,是本系统自动化检测中重要基础元件。合理的驱动设计、完善的隔离措施、可靠的保护回路是保证电磁阀控制的精度和灵活性的关键,也是保证硬件系统可靠性和安全性的关键。阀门驱动电路如图2所示。
BC639-16的集电极和发射级之间安全电压Vceo=80V,集电极最大能承受电压Ic=1A,直流放大倍数hFE范围为100~250,已知电磁阀线圈电阻约在200Ω左右,电源U=24V,正常工作时电源需提供电流IC约120mA左右,根据公式(3)知基级只需很小的电流便足以使三极管达到饱和从而驱动电磁阀正常工作。
IB=IC/hFE (3)
由图2可知,当光耦控制端为低电平时,受光器接收到光线,并产生光电流,输出端导通,进而使Q12导通,电磁阀在24V电压下正常工作。反之,当F1为高电平时,电磁阀断开。上拉电阻R52防止F1在电平状态不确定时,电磁阀出现误导通情况。R38和R46将24V电源分压,确保光耦输出端工作在合适的电压下。二极管D7用于泄放反向电动势,防止电磁阀开关动作瞬间产生的感应电流烧毁三极管Q12,从而起到保护元器件的作用。
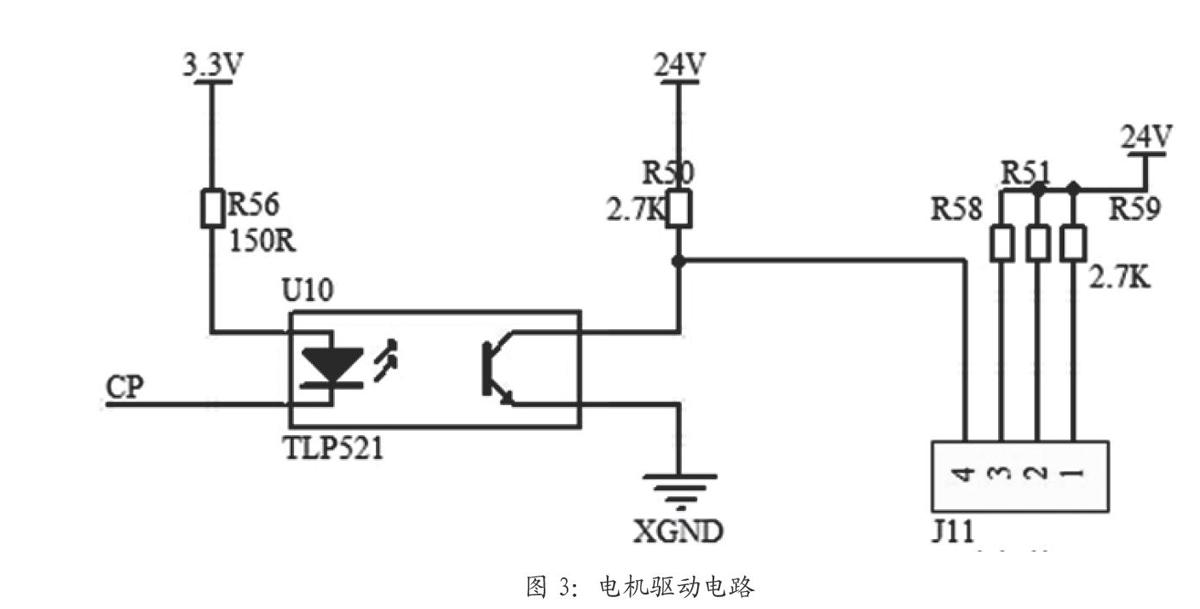
3.3 步进电机驱动电路设计
拟定被测带轮旋转一周用时2S,即被测带轮转速为N1=0.5转/秒,已知所选42步进电机减速比为5,被测带轮齿数Z1=124,与被测带轮啮合旋转的小塑胶轮齿数Z2=80,一个齿轮传动副中,两啮合齿轮转速和齿数关系公式如(4)所示。
N1/N2=Z2/Z1; (4)
由式(4)可求出小塑胶轮转速为N2=0.775转/秒,根据公式减速比为输入转速与输出转速之比可知电机输入转速N=3.875转/秒。设驱动器选用800脉冲/转的细分设置,可计算出PWM脉冲频率为3.1K。
电机驱动器采用共阳极接法,本系统最终设计的电机驱动电路如图3所示。由于PWM脉冲频率为3.1K,响应速度不高,同时兼顾经济原则,故采用TP521作为隔离和驱动的光耦器件。
4 总结
本文针对现行工厂带轮检测设备落后、功能单一等缺点,提出了新的检测仪设计方案,并简要阐述了机械结构方案和设计原理,着重介绍了电气控制的硬件电路设计,为现行企业的设备升级提供了切实可靠的路径,具有广阔的应用前景。
参考文献
[1]倪厚强.轴类零件综合误差在线检测仪研究与实现[D].东南大学,2004.
[2]王焊东.传感器应用技术[M].西安:西安电子科技大学出版社,2006.
[3]张国雄.测控电路[M].北京:机械工业出版社,2008.
[4]华成英,童诗白.模拟电子技术基础[M].北京:高等教育出版社,2006.6.
作者简介
龚阳波(1989-),男,湖南省张家界市人。硕士学位。研究方向为智能仪表。
作者单位
合肥工业大学仪器科学与光电工程学院 安徽省合肥市 230000
