基于边沿特征提取空位检测
2016-05-14王建飞

摘要:近年来,随着道路上出行车辆的不断增多,停车位置的查找变得非常困难。现阶段停车场主要采用人工管理方式,存在操作慢、难以统计等问题,停车资源得不到合理利用。为了解决这一问题,本文对每贞视频图像进行预处理、通过提取边沿特征,实时判断该位置的占用状态,对各车位进行监控,实验结果表明该方法实现了停车资源的高效管理[1]。
关键词:边沿检测 特征提取 空位检测
中图分类号:TP391.4 文献标识码:A 文章编号:1007-9416(2016)07-0044-02
1 引言
基于视频图像的车位状态监控方法[2]与传统停车场管理系统相比,资金方面,它节约成本,对于同样的工作,需要人力物力相对较少。对数据处理速度快,使用人员操作简单,安装方便,并且可以添加相关附加功能。国内外已经有大量学者在从事相关方面的研究工作,现已成为近年来智能交通与计算机视觉研究的重要课题[3]。
2 边沿特征提取
阶跃状边缘的位置在一阶导数的峰值点,在二阶导数的过零点;屋顶状边缘的位置在一阶导数的两峰值之间,在二阶导数的两个过零点之间[4]。
根据上图1,引入状态函数。若车牌图像函数为,则状态函数可由下式获得[1]
:
(1)
其中
(2)
(3)
t为任意大于0的常数,每次矩阵移动的大小,需要根据其取值情况而定,现取t=3,即每次对图像处理时,滑动模块大小为矩阵,定义这一状态函数,在图像中较高点将取到较大值,最低点取到较小值[1]如下图2所示。
2.1 垂直投影
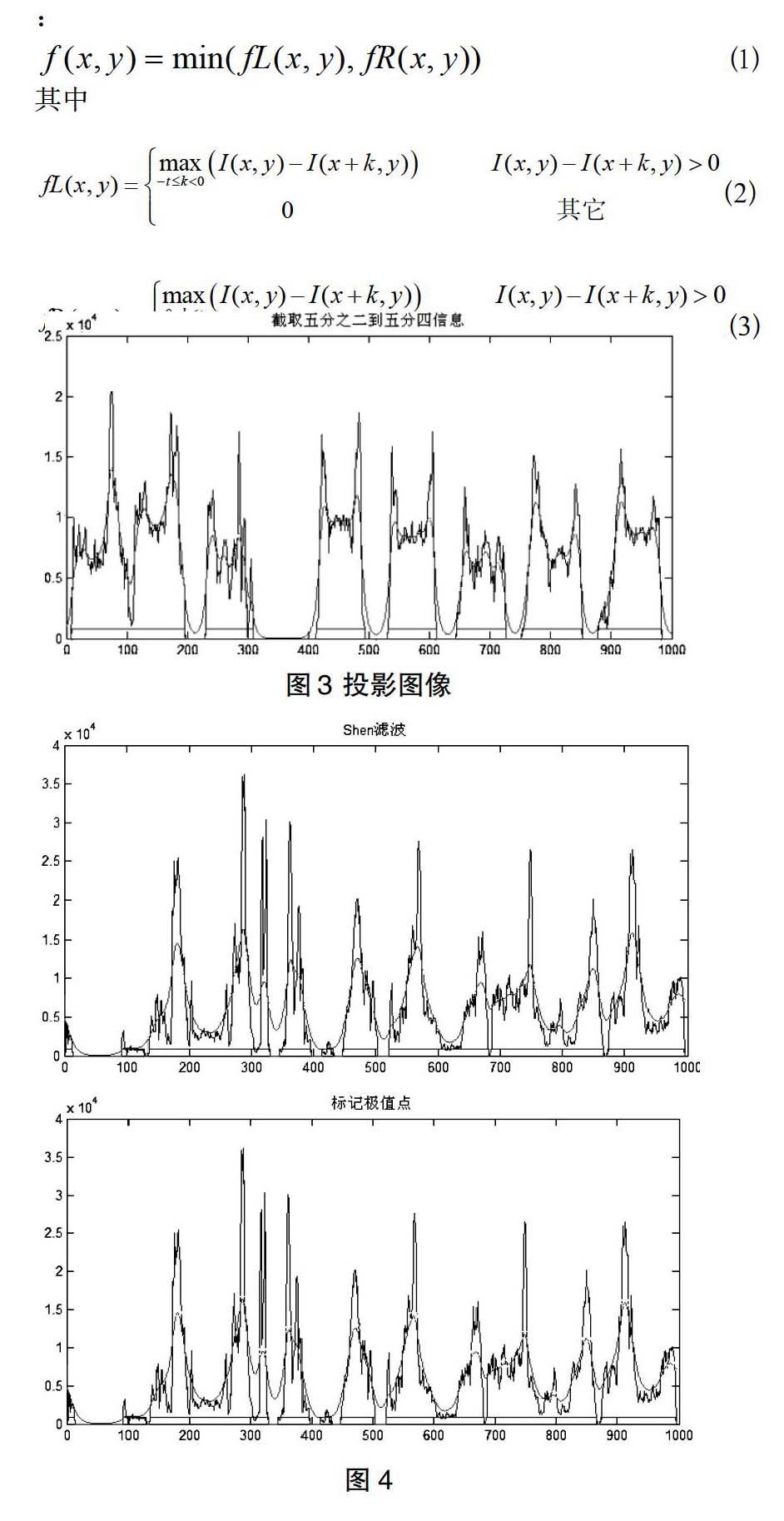
有车位置其信息相对集中在某一区域,现从图像中截取该区域,并令其为,将该图像垂直投影,画出其对应图像如下图3所示。
若投影图像成双峰状,则说明该停车位上有车,否则为空位。
2.2 标记极值点
对图像进行Shen滤波[5],对每一个停车位,若有车,则其统计结果应有由两个极值点,每个停车场摄像头位置一般是固定的,在该监控状态下,每个车位所占在宽度为已知,对统计结果中那些大于车位宽度的区域,可根据极值点的数码和车位宽度将其断开[1]如下图4所示。
3 车辆统计
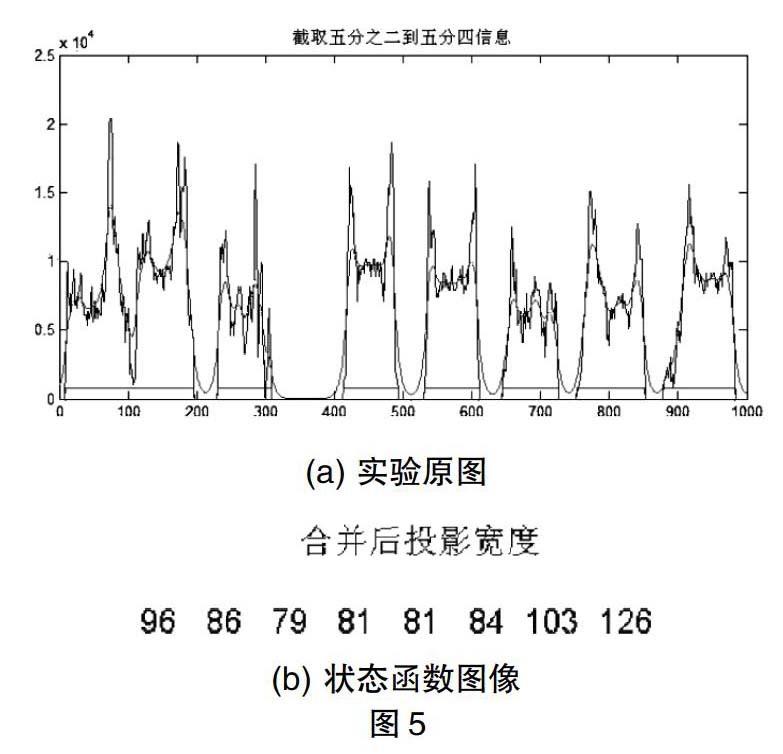
截取视频图像中的一部分进行垂直投影,得到一个值为0、1的一维数组,统计每一段1的个数,即得到有车区域所对应的宽度,如图5所示。
对于每个摄像头所控制的区域,总的停车数量已知,输入该状态下车位宽度的上下限,在根据合并后的投影宽度,即可得到现已经停入的车辆数,从而检测出空位如下图6所示。
参考文献
[1]王建飞.停车场空位检测系统研究[D].贵州:贵州民族大学,2014.
[2]谭晓军,沈伟,郭志豪.一种基于视频的道路交通流量监测方法[J].计算机应用,2005,25(5):1215~1218.
[3]马铭.基于视频的停车场车位状态监控识别系统[D],天津:天津大学,2007.
[4]王建飞,张儒良,黄成泉,王林.基于边沿特征分析的停车场空位检测[J].系统工程理论与应用.2013,(11).
