某型稳定平台控制系统的硬件设计
2016-05-14李科
李科

摘要:稳定平台广泛应用于现代武器装备中,为保证设备的正常工作状态,需要稳定平台隔离载体的干扰,保证设备工作环境的稳定。本文主要完成了测姿传感器的选型并完成了控制电路的设计,包括主控芯片的选型、串行通信电路设计、电源电路的设计、及保护电路的设计等,最后介绍了控制电路、驱动器、电机的电路连接方式。本文基本完成了平台测控系统硬件设计,这为后续的的软件设计和试验提供了基本的硬件基础,达到预期设计目标。
关键词:稳定平台 测姿系统 ATmega2560 伺服控制
中图分类号:TN761.2 文献标识码:A 文章编号:1007-9416(2016)07-0001-03
Abstract:Stabilized platform is widely used in modern weapons and equipment, to ensure the normal working state, needs a stable platform isolation carrier interference, ensure the stability of the equipment working environment. This paper mainly completed the selection of the position sensor and completed the design of the control circuit, including the main control chip selection, serial communication circuit design, the design of the power supply circuit, and the protection circuit design, etc., finally introduces the control circuit, drive, electrical circuit connection. This paper basically complete platform for measurement and control system hardware design, the software for the subsequent design and experiment provides the basic hardware foundation, the desired design goal.
Key Words:Stabilized platform; Attitude measurement system; ATmega2560; Servo control;
现代武器系统广泛使用平台,特别是舰载火炮系统,制导系统,雷达跟踪系统和惯导系统等。随着科技水平的发展,世界各国对现代武器系统的机动性、快反能力以及稳定跟踪和精确打击能力也提出了更高的要求,因此,对对提高稳定平台系统性能的研究更为迫切。为保证设备的正常工作状态,需要载体对稳定平台的干扰,保证设备工作环境的稳定。稳定平台主要作用即是隔离运动载体(如车辆、舰船、导弹等)在行进过程中对所搭载设备的干扰,使设备能有一个可靠的的工作环境[1]。稳定平台技术实现较难,跨度大且涵盖学科较多,综合了信号分析和数据采集技术、机械设计、机构动力学和运动学、现代控制理论及传感器技术等多个学科,主要在某些军事领域和民用领域有重要的应用[2],但是其通用产品不多。
1 测控系统硬件结构
测控系统硬件作为一个载体,主要实现控制程序的执行和控制策略的实现,它是实现整个平台控制系统的基础。如图1所示,测控系统核心芯片采用Atmega2560芯片及其它相应功能的电路模块组成的控制电路。该主控芯片通过串行通信接口0接收上位机发送的保持姿态信息,即二级平台所要保持的姿态信息;同时测姿传感器测得当前姿态信息,通过串行通信接口1发送给主控芯片;然后主控芯片将收到的原来的保持姿态信息和当前姿态信息进行比较解算,得到电机的转动速度和转动方向命令,并将命令通过2、3串行通信接口分别发送给方位驱动电机和俯仰驱动电机,再由驱动器控制电机完成相应的动作,使得二级平台稳定在某个所需要姿态上。
2 稳定平台的姿态测量系统
平台测姿系统包括对方位角和俯仰角参数的采集,以及对应姿态信息在ATmega2560主控芯片中的解算和信号处理。传感器通过串行通信接口与主控通信,为平台提供姿态角信号。核心控制芯片将测姿传感器测得的姿态角信息进行解算和处理后,给定驱动电机一个控制指令从而控制电机的运动达到平台稳定的目的。
目前使用最多的测姿方式主要包括双天线/多天线GPS测姿、惯导测姿、GPS/INS组合测姿等。惯性导航系统(INS)是用惯性元件来测量载体运动的加速度和角加速度,经过积分运算接出导航参数以确定载体位置和姿态。它与GPS导航系统不同,INS主要特点是:自主式、全天候、不会因外界干扰影响系统工作且无信号丢失。一般由三个加速度计、三个陀螺仪、导航计算机、稳定平台、控制器、电源及必要的外围附件组成。GPS主要通过各个卫星的广播数据解算出自己当前的位置信息和用户到卫星的距离,利用后处理软件差分处理后的位置坐标来解算航向角以及位置和速率。GPS的优点是可全天候使用,相对INS没有时间累计差,不足之处是受到遮蔽物的影响会使GPS接收有效星的能力下降。单独使用GPS或INS获取载体姿态通常存在缺陷,结合GPS和INS 各自的优点,将GPS和INS相互综合,融合两类姿态信息可以获得更精确可靠的姿态数据,该系统能得到长期准确的姿态、速度和位置信息,其角精度可以达到0.1°,速度精度达到0.1m/s,航向角精度≤0.3°,俯仰角精度≤0.2°。因此本文选GPS/惯导组合系统INS1200作为稳定平台的测姿传感器,采用RS232通讯用于同步通讯。该系统涵盖了GPS和INS的测姿优势,能得到准确的航向角度、俯仰角度、经纬度、高度、角速度等需求的参数信息,同时为了进一步提高系统精度和适用性我们可以采用扩展相应的外围配套(如扩展里程计等),并且该系统的数据输出率最高可达100Hz,这对于平台的高度动态和实时调整是尤为重要的。该系统的主要优点是:体积较小、性价比高、重量轻,目前主要用于车船和飞机等的导航以及稳定平台系统等领域。
3 控制电路设计
3.1 控制电路结构
控制电路结构框图如图2[3]。
3.2 主控芯片选定及串行通信接口电路
由于ATmega2560芯片[4]具有运算速率快且片上资源丰富,本设计采用该芯片作为控制电路微处理器;该芯片16路模拟输入,4路UART接口,一个16MHz晶体振荡器,一个USB口,一个电源 插座,一个ICSP header和一个复位按钮且支持I2C接口。测姿传感器、电机驱动器的通信采用标准的RS232串行通信。一般来说,RS232串行通信接口具有升压、电压极性反转能力,能够产生+10V和-10V电压,而微处理器的信号电压是TTL电平,电源工作电压是5V。为了与其他系统通信方式保持一致,本文选定使用较为通用的串行通信接口RS232,MAX232芯片串行通信接口电路如图3。
3.3 电源及保护电路
我们需要提供稳定的电源电压才能使得主控芯片正常工作。本文采用LM2576芯片,且芯片提供三挡且可调的多个电压档。
如图4所示,电源供电电路+12V输入电压经芯片处理得到+5V,为主控芯片ATmega2560、串口芯片MAX232等供电。CZ1、CZ2 C1分别为磁珠和耐高压电容,三者的功能主要为抑制输入电压中的噪声信号,R1为压敏电阻,对过高的输入电压进行电压嵌位,防止电压过大烧毁芯片。F1作为自恢复保险丝主要是保护电路及芯片,在电路供电电流过大或出现短路造成过电流时,自恢复保险丝迅速熔断。D1与R1、F1组成供电电压保护电路。
双向瞬态抑制二极管能够有效地保护电子线路中的精密元器件免受各种浪涌脉冲的损坏,具有响应快,无噪声等优点,通常在通信保护电路中使用。
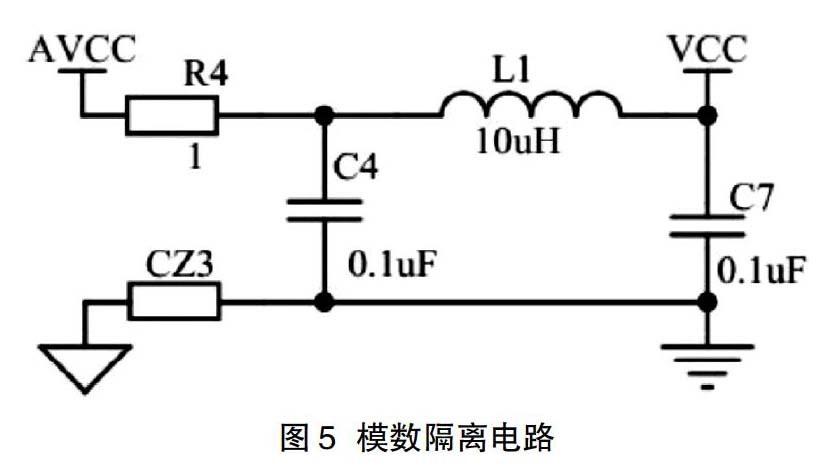
在模拟电路与数字电路之间的干扰容易导致芯片工作异常、通信出错等,为了使设备符合电磁兼容性的要求,因此进行性电路隔离很有必要;电路隔离的主要目的即通过隔离数字与模拟电路以切断噪声干扰的路径,达到抑制噪声干扰的目的。如图5所示,R4、C4、L1、C7组成低通滤波电路,防止数字电路的噪声信号对模拟端造成干扰。CZ3为0欧姆电阻,其主要特点是电流路径狭窄,可以限制噪声电流通过,对所有频率的噪声都有一定的衰减作用,可保证数字地与模拟地等电位的,又可以清除数字电路对模拟电路的噪声干扰[5]。
3.4 振荡电路
如图6所示,时钟振荡电路中的电容C9、C10的容值通常选择为几十pF。因为电容的大小对频率有微调作用,影响振荡的稳定性和起振响应速度。该振荡电路中选择电容值为15pF。另外,为了减小线路上的寄生电容,更好的保证电路稳定、可靠工作,在PCB电路板设计中晶振和电容应尽可能靠近主控芯片外接晶振引脚。
4 伺服控制模块
伺服系统选用交流永磁同步伺服电机及与其匹配的驱动器,驱动器可以实时接收控制电路的指令,对电机转速、方向、行程等实时控制,并且将以上的电机动作信息反馈给控制电路。
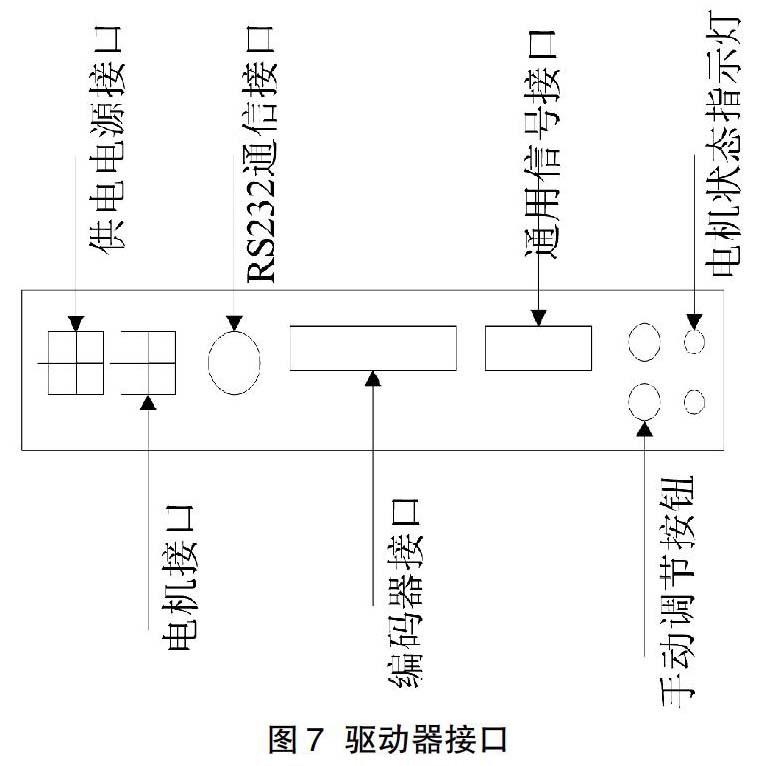
电机驱动器外部接口如图7,供电电源接口接外部电源,为驱动器提供稳定的工作电压。电机接口连接超声电机,为电机工作提供所需的脉冲电压。RS232通讯接口与控制电路连接,负责接收主控芯片发送的控制电机的动作命令,并且通过驱动器的通信将电机的转速等信息反馈给主控芯片。编码器接口与电机编码器连接,用于驱动器对电机转速和行程实时监测和控制[6]。
5 结语
本文主要首先完成了测姿传感器的选型并完成了控制电路的设计,包括主控芯片的选型、串行通信电路设计、电源电路的设计、及保护电路的设计等,最后介绍了控制电路、驱动器、电机的电路连接方式。完成了平台测控系统硬件设计,这为后续的的软件设计和试验提供了基本的硬件基础,达到预期设计目标。
参考文献
[1]周结华.基于运动载体的平台稳定系统控制方法研究[D].厦门:厦门大学硕士学位论文,2009.
[2] Hilkert JM. Inertially Stabilized Platform Technology Concepts and Principles[J].IEEE Control Systems Magazine, 2008,28(1):26-46.
[3]王德义,陈娟,孙德辉.基于Atmega128的电动云台控制器设计[J].电力自动化设备,2010, (6):140-142.
[4]周润景,郝媛媛.Altium Designer原理图与PCB设计[M].北京:电子工业出版社,2012.
[5]Peter J.Kennedy, Rhonda L Kennedy. Direct Versus Indirect Line of Sight Stabilization[J]. IEEE Transactions on Control Systems Technology,2003,11(1): 3-15.
[6]李贤涛.航空光电稳定平台扰动抑制技术的研究[D].长春:中国科学院研究生院(长春光学精密机械与物理研究所)博士学位论文,2014.
