SRTM数字高程模型在合成视景技术中的应用
2016-05-14范力维张锦赓王丽君
范力维 张锦赓 王丽君
摘 要:本文对SRTM数字高程模型在合成视景中应用的关键技术进行了研究,采用双线性插值法对地形数据重采样,为了提高地形绘制速度,构建了高程数据及纹理数据的金字塔模型,最后,论述了地形瓦片数据的调度方法。
关键词:合成视景;SRTM;DEM;三维地形可视化
0 引言
合成视景技术是一项新兴的飞机驾驶舱显示技术,其基本原理是利用机载地形数据库中存储的地形数据,根据飞机的精确导航定位信息,通过计算机图形技术,生成飞机外部环境的三维虚拟视景。国外多家航电设备公司都推出了具有合成视景功能的驾驶舱显示器产品,这些产品除了具有传统主飞行显示器的显示内容外,还可以实时地为飞行员显示飞机外部环境的三维地形、障碍物、机场跑道等信息,使飞行员能够在低能见度及陌生的地形条件下,获得近似目视飞行所需的信息,提供了更先进的环境感知能力,从而提升了飞行安全性。
SRTM(Shuttle Radar Topography Mission)地形数据是由美国航空航天局(NASA)、美国国家图像测绘局(NIMA)以及德国与意大利航天机构共同合作完成,覆盖了全球表面从北纬60°至南纬56°间陆地地表80%面积和95%以上的人类居住区,是迄今为止现势性最好、分辨率最高、精度最好的全球性数字地形数据,在科研、测绘、军事等领域得到广泛应用。
1 地形数据的预处理
1.1 地形数据的重采样
在航线使用中,不同类型的区域(全球陆地、海洋、终端控制区、机场区域等)数字地形所需的分辨率是不同的,因此在绘制三维地形之前,需要对原始地形数据进行重采样。常用的数据重采样方法有:最临近法、双线性插值法、三次样条函数法、有限元法、小波变换法等等。最临近法是根据采样点的具体位置,从原始数据上寻找与它位置最接近的点来给采样点赋值。最临近法是数据重采样中速度最快、最简单的一种方法,但同时细节损失也最多;双线性插值法是用最靠近采样点的四个已知数据点进行插值计算,方法简单,同时也保留较多的细节特征;三次样条函数法在拟合时只需有少量数据点配准,它保留了微地物特征,同时也保证了连接处平滑连续,但是计算量相对较大;小波变换法的多分辨率分析特性为格网模型的多分辨率表示提供了一种一致性的、具有坚实理论基础的处理方法。基于小波变换的多分辨率模型具有良好的局部细节层次控制特性,而且模型也有较好的连续性,但小波变换不能处理表面不连续的问题,而且算法比较复杂。
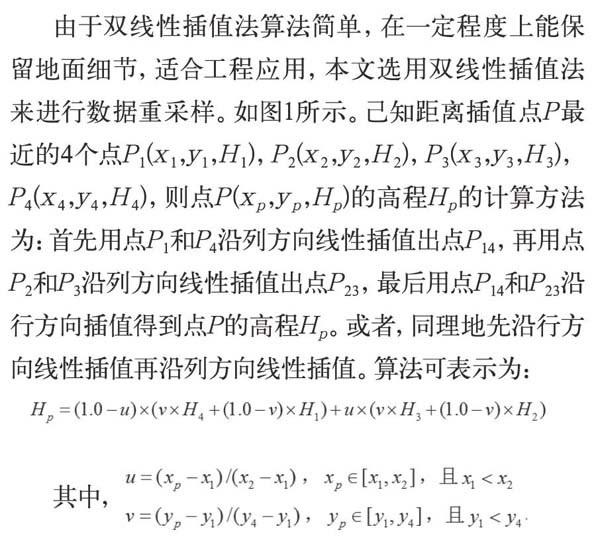
由于双线性插值法算法简单,在一定程度上能保留地面细节,适合工程应用,本文选用双线性插值法来进行数据重采样。如图1所示。己知距离插值点P最近的4个点P1(x1,y1,H1),P2(x2,y2,H2),P3(x3,y3,H3),P4(x4,y4,H4),则点P(xp,yp,Hp)的高程Hp的计算方法为:首先用点P1和P4沿列方向线性插值出点P14,再用点P2和P3沿列方向线性插值出点P23,最后用点P14和P23沿行方向插值得到点P的高程Hp。或者,同理地先沿行方向线性插值再沿列方向线性插值。算法可表示为:
其中,
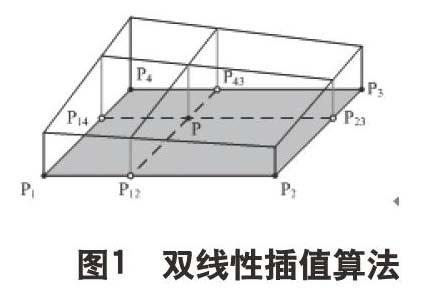
选取3弧秒分辨率的原始SRTM数据,采用双线性插值法得到0.3弧秒分辨率的地形数据,分别对3弧秒及0.3弧秒分辨率的地形数据进行绘制,如图2所示。
1.2 地形数据金字塔模型的构建
本文采用金字塔模型对地形数据进行分层处理,金字塔模型是一种多分辨率层次(multi-resolution hierarchy)模型,在图像处理、图像压缩、图像检索,以及地形可视化等方面都有着非常广泛的运用。通常采用倍率方法构建金字塔模型,从金字塔的顶层到底层,分辨率越来越高,但表示的地形范围不变。设顶层的分辨率为R0,倍率为m,则第k层地形数据的分辨率 Rk为:Rk= R0×mk。
金字塔的底部是最高分辨率的地形数据,顶部是低分辨率的重采样数据。这里约定:最顶层为第0层,由上至下层号逐层增加,随着层号的增加图象的分辨率以倍率m递增,通常m取2。纹理数据及DEM数据需分别建立金字塔模型,并且两模型的层数及分辨率保持一致。
将地形数据分层后,还需要对数据进行分块存储与调度。首先将最底层分块,每个地形块称为一个瓦片(tile),设最底层瓦片数量为M,金字塔模型共L层,则第k层的瓦片数量mk=m×4-(L-k)。
地形数据分层分块之后,必须对每一层的瓦片数据块进行索引并存储,由于每一层数据都是一个独立的绘制单元,所以只需要使用简单的层号和行列号即可作为瓦片块的全局唯一标识,每个瓦片以文件的形式存储,以层号-列号-行号的方式命名。
2 地形数据的动态调度
合成视景技术需实现超内存地形生成,因此需要对海量地形数据进行分块,并动态调度瓦片块参与地形绘制。在大规模场景漫游过程中,可见的瓦片块是随摄像机视锥的移动实时变化的,当视点离开当前所在的瓦片、视角变化、视场大小发生改变等情况下,必须重新构造瓦片的可视区域。由于飞机在飞行过程中,视点是连续移动的,因此可视区域也是连续变化的,需使用一个外层包围缓冲区对可视区域内的瓦片进行预装载,根据视点位置、视场、视角、可视距离,可以确定摄像机视锥在地形上的投影,该投影区域所覆盖的所有瓦片都需要装载到内存并参与绘制。与可视区域外层瓦片相邻的所有瓦片构成外层包围区域,该区域所覆盖的瓦片也需要装载到内存,但并不参与绘制。在场景漫游过程中,实时构造可视区域及缓冲区,将满足装载条件的瓦片从外存读入内存,并将对地形绘制已无贡献的瓦片卸载,释放内存空间。
3 结束语
合成视景技术能够有效改善飞行安全性,具有广泛的应用前景,而三维地形的可视化是合成视景研究的重点,本文研究了SRTM数字高程模型用于地形可视化的预处理及调度方法,验证了其在合成视景技术中应用的可行性。
参考文献
[1] 刘跃.驾驶舱新变化[J].国际航空,2007,12:44-45.
