基于2D/3D融合的空间圆非合作目标位姿测量系统
2016-05-10许林时建奇
许林 时建奇

摘 要:针对基于圆特征视觉测量算法解的二义性消除问题,以及单PMD相机分辨率过低,特征点难以提取问题,提出一种基于高分辨率RGB相机和PMD 3D相机融合的基于空间圆目标的非合作目标位姿测量方法,并构建测量系统软件对实物模型进行实验。首先,通过两个相机数据配准,利用配准后距离数据提高椭圆检测速度和精度,随后通过PMD获取的场景深度数据去除二义解,最终得到空间圆目标准确位姿数据。实验结果说明,此方法能够快速有效求解目标位姿。
关键词:非合作;位姿测量;2D/3D融合;圆特征
1 位姿测量系统
1.1 系统组成
作为一类基于TOF(Time-of-Flight)技术的3D相机,PMD是一种新型的、小型化立体成像设备,无需扫描便可实时高效的捕捉动态目标的幅度信息、距离信息和灰度信息。
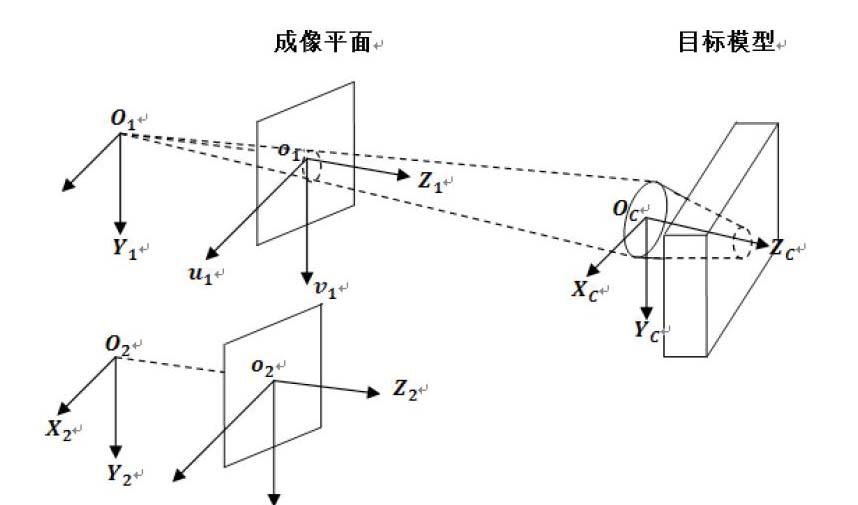
为了便于分析和系统归一化测量,参考相机小孔成像模型,就实验测量系统建立如图2-11所示坐标系,2D相机、PMD相机坐标系和物体坐标系,以及像平面坐标系和:
(1)、相机坐标系:为RGB相机的投影变换透镜平面和相机光轴的交点,轴和像平面垂直,轴和轴分别与成像平面平行,且与和轴平行同向,符合右手坐标系关系。PMD相机坐标系构建方法相同。
(2)、像平面坐标系:为成像平面和相机光轴的交点,可通过相机内参标定获取准确位置。建立右手直角坐标系,和轴分别与成像平面水平和垂直方向平行,方向为沿光轴正方向观察,从左上到右下。通过同样的方法为PMD相机构建坐标系。
(3)、物体坐标系:以空间圆平面为依托,以其法向量构建轴,取圆平面任意半径射线作为轴方向,根据右手准则,求的,至此构建完成物体坐标。
1.2 位姿测量系统流程
主要步骤如下:
(1)图像采集:利用RGB相机和PMD相机对目标进行图像采集,获取高分辨率的RGB图像和PMD灰度图像、深度数据。
(2)图像配准融合:分别对PMD和RGB相机进行标定,获取两相机坐标系之间的变换关系,配准图像;规避传统融合图像方法,这里采用信息部分融合方法,使得2D图像与深度数据一一对应。
(3)椭圆特征提取拟合:通过针对具体实验环境,专门设计的椭圆提取算法,实现椭圆快速检测提取拟合。
(4)位姿求解和二义性消除:通过深度数据计算目标圆半径R,可通过文献[4][5]算法求取位姿得到两个解,通过深度数据确定的圆面特征空间法向量,去除二义解。
图1 测量系统坐标系的定义
2、基于几何投影成像关系的2D/3D图像快速配准融合
假设任意点P在2D相机和PMD相机的像点分别为Pi和Pj,为了实现2D相机和PMD相机的配准,即确定以下函数关系:
考虑到PMD相机深度图像分辨率较低,在提取特征点时可能失效,对传统的基于特征点提取和搜索匹配点方式的配准方法不再适用[6][7]。为了实现此类不同分辨率、不同类型数据图像的快速配准,本文建立了基于几何投影成像关系图像配准模型。
如图1所示,通过PMD相机可以获取目标深度信息d2P,P点在的坐标为(X2P,Y2P,Z2P),则:
进而得到PMD和RGB相机坐标系之间的变换关系:
通过式(4)和(6)可以的到2D图像和PMD图像的对应关系,完成距离图像一对多的配准融合结果。因此,在RGB坐标系下椭圆拟合可以方便获得其在PMD相机坐标系下方程,利用深度数据重构空间圆,可以快速消除二义解。
3 系统软件和实验结果
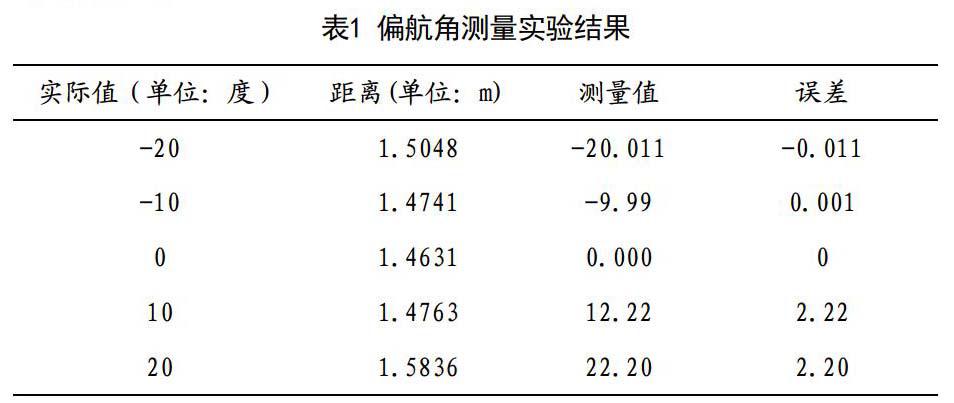
根据本文的设计的测量系统,采用PMD[vision]? CamCube 2.0(该相机分辨率为204*204),大恒图像公司的DV-SV1421FC RGB相机(分辨率为1392*1040),进行实物模型精度测量实验。表1表示Y轴依次单轴旋转时的位姿测量结果。结果表明正方向偏航存在系统误差,鉴于实验目标模型噪声复杂,反光强烈,精度受椭圆检测结果限制,基本达到设计要求。
4 结论
本文讨论了非合作圆特征近距离中2D/3D融合的相对位姿测量问题,给出了利用空间圆特征信息,通过PMD相机和2D相机快速配准融合实现非合作目标位姿参数测量,保证了测量结果的精度和提高算法实时性。通过C++程序实现了位姿测量软件系统,完成数据采集和位姿测量。实验结果表明,该算法的旋转测量误差较小,平动测量偏差毫米级别,测量速度快,测量系统能够有效的测量目标模型位姿。