一种高负载自重比轻型机械臂的研究
2016-05-10陆志国刘作涛李红建刘文颢
陆志国,邹 冀,刘作涛,李红建,刘文颢
(东北大学机械工程与自动化学院,辽宁沈阳 110004)
一种高负载自重比轻型机械臂的研究
陆志国,邹 冀,刘作涛,李红建,刘文颢
(东北大学机械工程与自动化学院,辽宁沈阳 110004)
摘 要:针对现有轻型机械臂负载自重比较小的问题,提出了将微型液压系统作为轻型机械臂直接驱动源的方案。设计了液压驱动轻型机械臂的机械结构,利用Arduino平台搭建了控制系统,提出了控制方法,并进行了实验。实验结果表明:应用微型直驱式液压系统的轻型机械臂负载自重比高,定位准确。
关键词:工业机器人技术;轻型机械臂;微型直驱式液压系统;负载自重比;性能测试;控制
E-mail:zglu@me.neu.edu.cn
陆志国,邹 冀,刘作涛,等.一种高负载自重比轻型机械臂的研究[J].河北工业科技,2016,33(2):146-150.
LU Zhiguo,ZOU Ji,LIU Zuotao,et al.Study of light weight manipulator with high load/weight ratio[J].Hebei Journal of Industrial Science and Technology,2016,33(2):146-150.
在传统的焊接、喷涂和搬运等工业自动化生产线上,工业机器人占据主导地位,但随着科技的发展和社会的进步,机器人应用领域在不断扩大,传统的工业机器人在很多情况下已经不能完全胜任它们的工作了,从而轻型机械臂应运而生[1]。轻型机械臂除了需要高精度的位置控制外,还需要其对未知工作环境具有柔顺性,即当机器人与未知环境相接触时,不至于对机器人本身和操作对象造成损伤。德国宇航中心(DLR)的机器人专家HIRZINGER等[2]指出:“轻型机械臂是为了便于灵活移动,与预先未知的环境、人发生交互作用而特意设计的。这种应用往往要求较高的负载/自重比。”当前,轻型机械臂大多采用电机驱动[3],需在机械臂上安装电机,这种结构刚性较大,用于与人交互的服务型机械臂容易对人造成伤害,而且电机及其附属机构具有较大的自重,增加了机械臂的额外负担[4],减弱了机械臂的有效承载能力,降低了负载自重比。与电机驱动系统相比,液压系统的压力取决于负载,这一方面可以提高机械臂的柔顺性,另一方面可提供更大的驱动力[5],增强机械臂的有效承载能力。目前液压控制技术已经在诸如冶金、机械等工业部门,飞机、船舶等交通部门,航空航天技术,海洋技术,近代科学实验装置及武器控制等[6]得到广泛应用,但是,现有的大型液压系统通常用于重型机械,且需要很多复杂设备作为辅助[7]。微型液压系统具有质量轻、体积小、可提供较大的驱动力等优点[8]。为了增强机器人的动态特性、负载能力和环境适应能力,液压驱动方式引起了机器人研究者的兴趣[9]。因此,本文提出采用微型直驱式液压系统作为轻型机械臂驱动系统的方案,可以满足轻型机械臂在有效承载力、安全、定位等方面的要求。
1 机械结构
实验用机械臂为微型液压系统驱动的机械臂。机械结构主要由大臂、小臂、驱动系统等部件构成。小臂通过肘关节与大臂相连,大臂通过肩关节固定在底盘上。实验用机械臂结构尺寸如图1所示。该机械臂大臂与水平方向夹角为10°~90°,小臂与大臂的夹角为30°~150°。
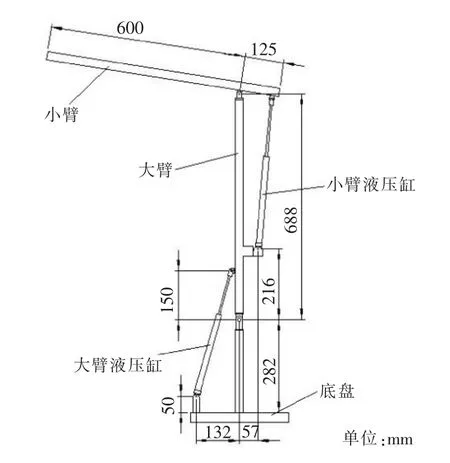
图1 机械臂结构示意图Fig.1 Sketch map of the manipulator
2 驱动系统
2.1 驱动系统的组成
如图2所示,实验用驱动系统为微型直驱式液压系统,由液压缸、溢流阀、电磁式三位四通换向阀、油箱及齿轮泵组成。具体结构为两个液压缸分别通过换向阀与两个齿轮泵相连,再与油箱相连,然后再分别分出一个支路连接溢流阀。齿轮泵将液压油压入换向阀,换向阀不同的位置可以改变油路,使相应的液压缸伸长或缩短,从而使液压缸推拉机械臂实现俯仰动作。该换向阀为M型中位机能,换向阀处于中位时,液压泵卸荷,液压缸可以在任意位置停止。溢流阀的作用是:当负载突然增大时,普通机械臂会卡死,甚至损坏,但在微型直驱式液压系统中液压油会通过溢流阀流回油箱,保护机械臂和人员的安全。现有的类似驱动系统中,有的除了主泵外还需添加辅助泵、高速开关阀等复杂的辅助机构[10]。与之相比,实验用微型直驱式液压系统结构简单,稳定性高。
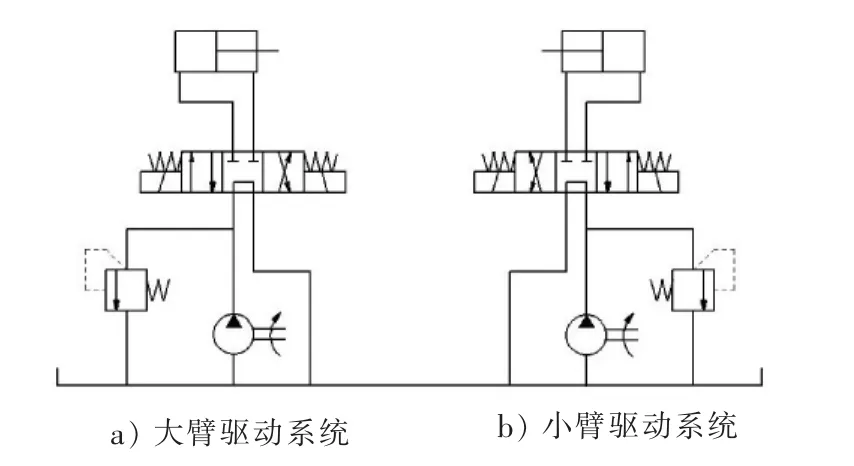
图2 驱动系统组成Fig.2 Composition of the driving system
2.2 液压缸的选用
1)大臂液压缸
设大臂在下极限位置时大臂液压缸的长度为lmin,在上极限位置时大臂液压缸的长度为lmax。由图3可知:
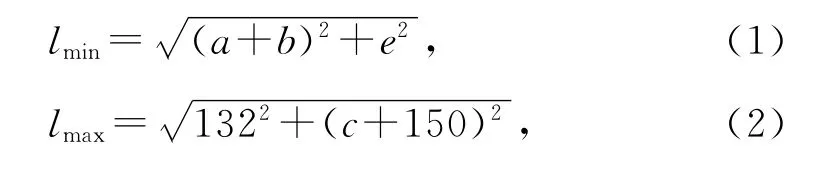
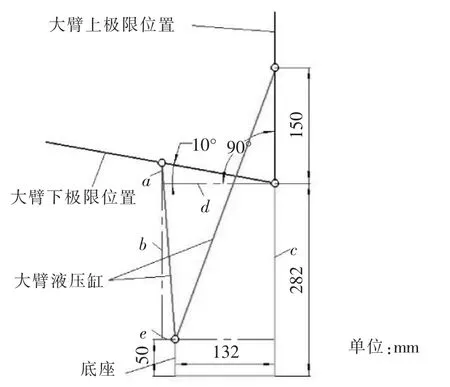
图3 大臂的极限位置Fig.3 Limit of the big arm
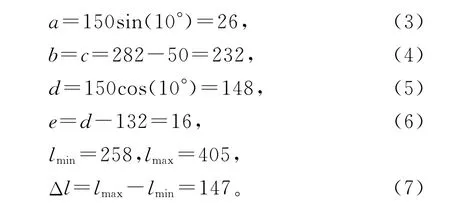
由式(7)可知,为保证大臂的活动范围,大臂液压缸的行程至少应为147mm,故取大臂液压缸的行程为150mm。
2)小臂液压缸
设小臂在下极限位置时小臂液压缸的长度为Lmin,在上极限位置时小臂液压缸的长度为Lmax。由图4可知:


图4 小臂的极限位置Fig.4 Limit of the small arm
由式(13)可知,为保证小臂的活动范围,小臂液压缸的行程至少应为209mm,故取小臂液压缸的行程为210mm。
3)液压缸特性方程
若输入液压缸的油量为q,液压缸进出口压力分别为p1和p2,A1为无杆腔的有效工作面积;A2为有杆腔的有效工作面积。油液从工作端(无杆腔端)输入,其活塞所产生的推力F和速度v为

2.3 齿轮泵工作原理
外啮合齿轮泵作为液压传动中最常用的动力源之一,长期以来应用相当广泛[11],装在泵体中的一对参数相同的渐开线齿轮互相啮合,当传动轴带动齿轮旋转时,泵的吸油腔的轮齿逐渐退出啮合,使吸油腔容积增大而吸油。泵的压油腔的轮齿逐渐进入啮合,使压油腔容积减小,将油液压出。
3 控制方法
实验用机械臂的控制系统由控制手柄,控制器,反馈器,Arduino uno及电机控制器组成。Arduino是一块基于开放原始代码的Simple I/O平台。该平台由2部分组成:硬件(包括微处理器、电路板等)和软件(编程接口和语言)[12],它的主控板采用AVR单片机[13]。控制器与反馈器均为B100K电位器。控制器装在控制手柄的大臂与小臂关节处,改变控制手柄的姿态,即可改变输入角度。反馈电位器装在机械臂的大臂与小臂关节处,机械臂的不同姿态对应不同的输出角度。根据输入角度与输出角度,单片机通过电机控制器控制齿轮泵的电机使齿轮泵转动,从而使机械臂完成俯仰动作,直至机械臂姿态与控制手柄姿态吻合,机械臂停止动作。机械臂控制流程如图5所示。
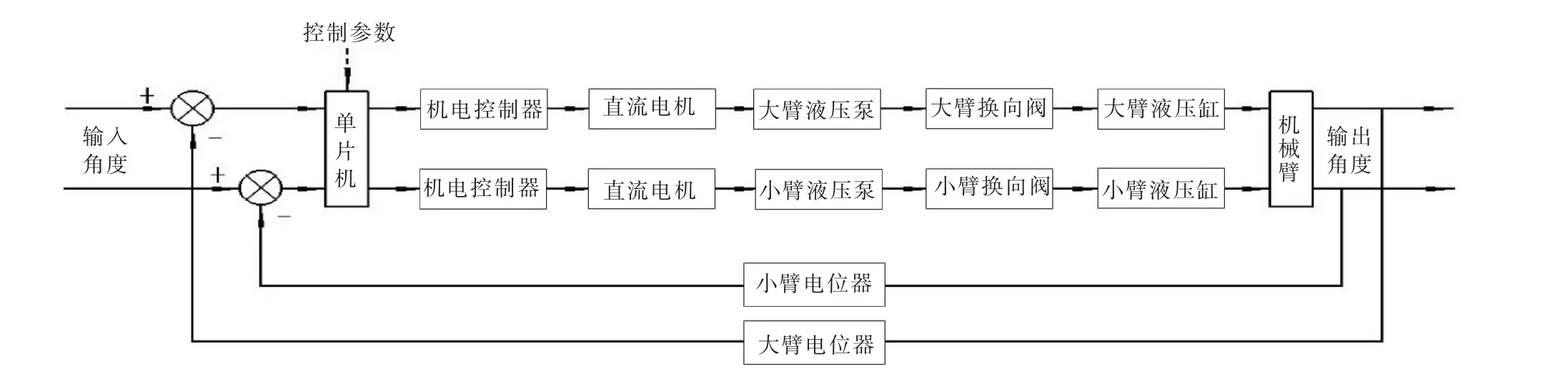
图5 机械臂控制流程图Fig.5 Flow chart of the control of the manipulator
4 实验过程
4.1 实验方法
实验时,负载位于机械臂末端,采用向容器中加水的方式来改变负载,控制机械臂的Arduino uno与上位机间利用串口进行通信,将控制手柄的输入角度、反馈电位计的反馈角度实时上传到上位机,上位机同时保存该数据。
4.2 机械臂的极限载荷
经实验测得,实验用机械臂的极限载荷可达5.1kg,包括齿轮泵及油箱在内的机械臂自重为4.8kg,负载自重比可达1.06[14],远远大于相关参考文献中机械臂的负载自重比,如表1所示。

表1 负载自重比对照表Tab.1 Contrast of load/weight ratio
4.3 机械臂的动作速度与定位性能
为进一步检测实验用机械臂的动作速度与定位性能而进行实验,实验分别研究了机械臂在半极限载荷和极限载荷2种情况下的运动。
如图6所示,半极限载荷时,设定小臂目标输入角度为相对于大臂120°,大臂目标输入角度为相对于水平方向85°。在最初状态,小臂的输出角度为相对于大臂80°,大臂的输出角度为相对于水平方向45°。从目标输入角度输入单片机到目标位置的达到,实现时间为8s。动作结束后,小臂的输出角度为相对于大臂120°,大臂的输出角度为相对于水平方向84.5°,与目标输入角度基本一致。实验结果如图7所示。

图6 半极限载荷动作过程Fig.6 Action process of the manipulator with half of limit load

图7 半极限载荷实验结果Fig.7 Experimental results of the manipulator with half of limit load
图8所示为机械臂的负载为极限载荷时的动作过程。从目标输入角度输入单片机到目标位置的达到,实现时间为10s,大小臂的最终角度与目标输入角度基本一致,实验结果如图9所示。

图8 极限载荷动作过程Fig.8 Action process of the manipulator with limit load

图9 极限载荷实验结果Fig.9 Experimental results data graph of the manipulator with limit load
实验结果表明,在半极限和极限载荷2种情况下,机械臂均可达到预定位置,定位较为准确。
5 结 语
针对现有轻型机械臂负载自重比较小的问题,提出采用微型直驱式液压系统作为轻型机械臂驱动系统的方案。实验结果表明,实验用机械臂的末端载荷可达5.1kg,机械臂自重4.8kg,负载自重比为1.06,大于多数现有的机械臂,定位较准确,动作速度较快。
参考文献/References:
[1] 夏严峰.轻型机械臂柔性关节设计与实验研究[D].哈尔滨:哈尔滨工业大学,2014.XIA Yanfeng.Design and Experimental Research of Flexible Joint of Lightweight Manipulator[D].Harbin:Harbin Institute of Technology,2014.
[2] HIRZINGER G,ALBU-SCHAEFFER A.Light-weight robots [J].Scholarpedia,2008,3(4):3889.
[3] 管小荣,袁辉,王亚平,等.基于AMEsim的单兵助力装置微型液压系统设计与仿真[J].机械制造与自动化,2014,43(1):111-114.GUAN Xiaorong,YUAN Hui,WANG Yaping,et al.Design and simulation of miniature hydraulic system for individual soldier assisting device based on AMEsim[J].Machine Building &Automation,2014,43(1):111-114.
[4] 郭大宝,梅涛,骆敏舟,等.老人服务机器人机械臂的动力学分析与轻量化设计研究[J].中国机械工程,2012,23(10):1146-1150.GUO Dabao,MEI Tao,LUO Minzhou,et al.Dynamics analysis and lightweight design of manipulator of elderly serve robot[J].China Mechanical Engineering,2012,23(10):1146-1150.
[5] 付红光,范孝杰.液压系统在矿山机械中的应用[J].科技与企业,2013(21):344.FU Hongguang,FAN Xiaojie.Application of hydraulic system in mining system[J].Journal of Science and Technology and the Enterprise,2013(21):344.
[6] 王丽智.混合灵敏度控制方法在直驱式液压系统中的应用及实验研究[D].哈尔滨:哈尔滨工业大学,2007.WANG Lizhi.Research and Application on Experiment of Mixed Sensitivity Method in Direct Drive Hydraulic Servo System[D].Harbin:Harbin Institute of Technology,2007.
[7] 韩慧仙,曹显利.工程机械液压控制系统技术体系分析[J].液压气动与密封,2010(5):6-8. HAN Huixian,CAO Xianli.Analysis on technological system of construction machinery hydraulic control system[J].Hydraulics Pneumatics &Seals,2010(5):6-8.
[8] 王存堂,卢昆,王明智.微型液压系统及其在主动控制中的应用[J].液压气动与密封,1997(1):48-50.WANG Cuntang,LU Kun,WANG Mingzhi.Micro hydraulic system and its application in active control[J].Hydraulics Pneumatics &Seals,1997(1):48-50.
[9] 王海燕.液压驱动双足机器人运动系统设计与控制[D].济南:山东大学,2014.WANG Haiyan.Design and Control of Hydraulic Actuated Biped Robot Motion System[D].Jinan:Shandong University,2014.
[10]唐维军.液压定向夹持机械臂及其液压系统分析[J].液压与气动,2012(11):10-12.TANG Weijun.Analysis of hydraulic grasping arm and its hydraulic system[J].Chinese Hydraulics &Pneumatics,2012 (11):10-12.
[11]李玉龙,刘煜.外啮合齿轮泵卸荷面积的精确仿真分析[J].农业工程学报,2009,25(3):42-45.LI Yulong,LIU Yu.Precise simulation analysis of relief area of external spur-gear pump[J].Transactions of the CSAE,2009,25(3):42-45.
[12]蔡睿妍.Arduino的原理及应用[J].电子设计工程,2012,20 (16):155-157.CAI Ruiyan.Principle and application of Arduino[J].Electronic Design Engineering,2012,20(16):155-157.
[13]杨继志,郭敬.Arduino的互动产品平台创新设计[J].单片机与嵌入式系统应用,2012,12(4):39-41.YANG Jizhi,GUO Jing.Arduino based interactive product innovation[J].Microcontrollers &Embedded Systems,2012,12(4):39-41.
[14]方红根,杨军.基于模块化关节轻型机械臂的研制[J].上海电气技术,2011,4(4):41-46.FANG Honggen,YANG Jun.A light weight manipulator based on modular joint[J].Journal of Shanghai Electric Technology,2011,4(4):41-46.
[15]舒畅,熊蓉,沈振华,等.采用成品零部件的低成本服务机器人结构设计[J].工程设计学报,2010,17(3):236-240.SHU Chang,XIONG Rong,SHEN Zhenhua,et al.Structure design of service robot using commercial off-the-shelf components[J].Journal of Engineering Design,2010,17(3):236-240.
[16]姚玉峰,苏衍宇,杜志江,等.安装于电动轮椅上轻型作业臂的研制及评价[J].机械设计与研究,2009,25(1):43-47.YAO Yufeng,SU Yanyu,DU Zhijiang,et al.Design and evaluation of light manipulator mounted on wheelchair[J].Machine Design and Research,2009,25(1):43-47.
Study of light weight manipulator with high load/weight ratio
LU Zhiguo,ZOU Ji,LIU Zuotao,LI Hongjian,LIU Wenhao
(Department of Mechanical Engineering and Automation,Northeastern University,Shenyang,Liaoning 110004,China)
Abstract:Aiming at the problem that existing light mechanical arms are usually with low load/weight ratio,aplan that using the direct-driving hydraulic system as the driving system of the light mechanical arm is proposed.According to the plan the mechanical structure is designed,the control system is constructed with Arduino,the control method is put forward,and the experiment is carried out.The experimental results show that the load/weight ratio of the light mechanical arm with mini direct-driving hydraulic system is high,and the positioning accuracy is in good condition.
Keywords:industrial robot technology;light weight manipulator;mini direct-driving hydraulic system;load/weight ratio;performance test;control
作者简介:陆志国(1982—)男,辽宁义县人,讲师,博士,主要从事欠驱动自适应式机械结构设计、多运动模式仿人机器人运动控制、多点接触闭合运动链内力最优分配方面的研究。
基金项目:国家自然科学基金(51505069);教育部青年教师科研创新基金(N120403016);中央高校基本科研业务费项目(N140304008);辽宁省科技计划项目(2015020150);沈阳市科技计划项目(F15-123-9-00)
收稿日期:2015-12-12;修回日期:2016-01-11;责任编辑:冯 民
文章编号:1008-1534(2016)02-0146-05
中图分类号:TP241
文献标志码:A
doi:10.7535/hbgykj.2016yx02009
