LiDAR技术在公路工程测量中的应用
2016-05-09贾军
贾 军
(山西交通职业技术学院,山西 晋中 030619)
道路工程
LiDAR技术在公路工程测量中的应用
贾 军
(山西交通职业技术学院,山西 晋中 030619)
依托某高速公路工程测量项目,采集大量LiDAR点云数据,并将扫描生成的DTM与现场勘测的数据进行对比分析,研究得出LiDAR扫描技术用于公路工程测量的精准度与影响因素,同时针对LiDAR扫描技术应用于公路工程测量的可行性进行了探讨。
LiDAR技术;工程测量;精准度
1 试验方案
1.1 试验的仪器及性能
选用加拿大生产的ILRIS-3D激光扫描仪做为本次试验勘测仪器。该仪器重11 kg,发射的光源为一级激光,安全性好,同时使用PDA无线遥控便于操作。
ILRIS-3D激光扫描仪的扫描勘测距离长,精准度高,完全符合公路勘测的要求。其主要技术性能指标如表1所示。
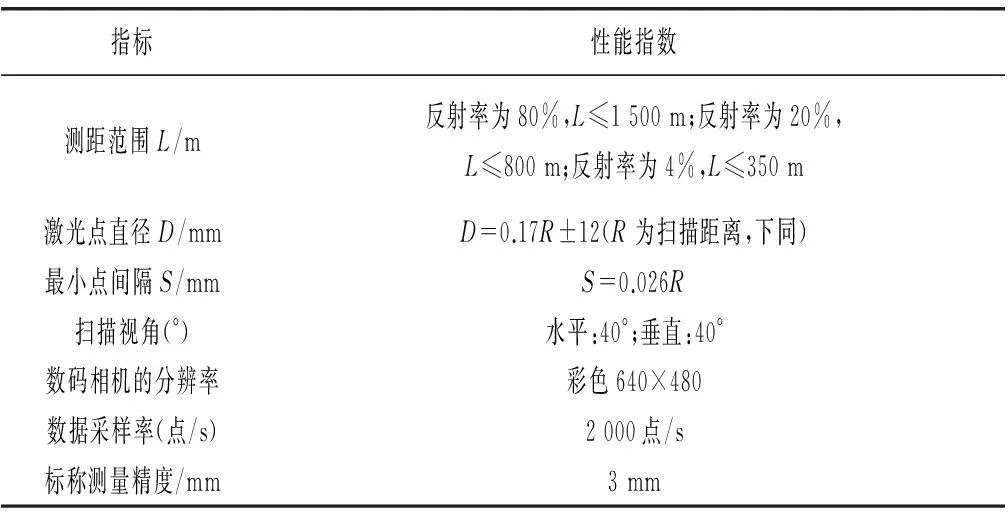
表1 ILRIS-3D激光扫描仪技术性能指标
1.2 工点的遴选
分别以某高速公路K86+700桩号的隧道进口处、K90+280桩号的隧道出口、K91+150桩号的隧道进口、K94+220桩号的隧道出口做为测试工点A、B、C、D,且4处工点均是山、平地结合的地形,植物覆盖率较低。
1.3 试验过程
2014年10月25日进场,10月26日~27日确定勘测试验场地,在场地选择上必须遵循以构造物工点与植被覆盖率适中的原则。同时,利用地面上的电线杆做为测量坐标点并进行标记(测量坐标点包括点云控制点与平面位置检查点)。10月28日~30日进行LiDAR扫描,并测量标记的各三维坐标。11月1日~10日使用全站仪测量扫描范围内的地形散点。
由于ILRIS-3D激光扫描仪不具备对中定向功能,因此扫描时须进行布设,同时对点云控制点测量。此外,点云控制点决定着最终测量所得地形的质量,因此将捆绑尖木棍的电杆做为本次试验的点云控制点,以确保测量坐标点的清晰。
将扫描仪器置于视野开阔且平整的地方进行测试,同时在PDA无线遥控上设置好扫描的范围与间距。本次试验在范围内和点云控制点周围的扫描间距分别设定为50 mm、5 mm。扫描的范围、点间距与速度决定着仪器扫描所需时间,经过在粗算,扫描间距为1 m时,使用ILRIS-3D激光扫描仪扫描1 km2范围需花费8 min左右。
2 试验数据处理分析
2.1 试验数据处理
通过对A、B、C、D工点的扫描,共计得到扫描点11 494 365个。整个试验需将各工点独立进行扫描,且1次完成,确保点云块之间无连接。然后将扫描点导入Poly Works随机软件包,依次对点云数据进行编辑、计算、显示和输出的处理。
(1)转换坐标。根据标记点的扫描间距不同,将坐标点的位置通过Poly Works随机软件包进行选取。
通过见图7对比分析可以发现,椒江流域内,随着日照时长的增减,水体悬浮泥沙浓度也随之发生趋势相同的波动,同时,二者决定系数R2达到0.7582,说明流域内水体悬浮泥沙浓度与年内日照时长有较强的相关性.
首先,选取点云图上的测量标记点位置并输入坐标,然后通过Poly Works随机软件包计算出点云与工程坐标系中匹配和转换的精度。通过计算本次试验工点A的转换精度为3.16、工点B为4.57、工点C为3.45、工点D为4.63,精度均较高。
(2)筛选数据。在大量点云控制点中筛选出测量地形图所需的点云(如地表的点云)做为测量地表的坐标,同时将地形图不需要的点云(如植被)进行删除处理。
(3)采集数据。完成坐标转换与数据筛选后得到实际测量目标所需的点云与点云坐标,本次测量在地形图范围内共采集378 422个扫描点,这些扫描点能直接生成数字地面模型(DTM),也能在某段间距内插获取该样点的坐标与高程。
(4)建立数模。利用在测量地形图范围内采集的扫描点建立数字地面模型。
2.2 精度分析
将试验数据进行处理,分别得到测量标记点的平面坐标与间距为1 m、2 m、5 m的地面散点坐标。通过对比分析三维扫描仪测出标记点、实际现场测量点的平面坐标,计算出三维扫描的平面精度。将间距为1 m的地面坐标、高程分别生成DTM,并在DTM内植入实际现场测量点的平面坐标,通过对比两者的高程,可得到测量地形图的高程精度;而横向、纵向断面的精度分别是以其断面在DTM中的测量所得地形变化点的间距对比现场实际测得地形变化点的间距来获取。
(1)地形图的平面精度。由于本次测量过程中扫描范围内能准确测量的平面坐标点不多,故增加了65个坐标标记点辅助测量,在原平面坐标测量基础上,辅助标记点还需利用2 s级全站仪将其水平角、垂直角与距离进行1次测量。为确保点云坐标的计算,分别在工点A、B、C、D的扫描区域内选取4个测量标记做为点云控制点,而剩下的标记点用于平面坐标精度的确定。4个工点的平面精度试验点数量分别为18、9、12、12个。因精度试验点的数量较少,故本次试验针对各工点的平面位置精度采取综合分析,并计算得出各工点平面位置的平均误差为4 cm,误差范围为7.6~0.5 cm。
(2)高程精度。由于高程点位数量过多,因此同样需使用了2 s级全站仪对本次试验的10 150个地形散点的水平角、垂直角与距离进行1次测量。通过测量,得出工点A、B、C、D的高程中平均误差分别为10.1 cm、11.6 cm、10.4 cm、10.5 cm;最大误差分别为16.8 cm、18.2 cm、16.1 cm、16.5 cm;最小误差均为0 cm。
(3)地形图的纵、横断面精度。据统计本次测量的中桩高程与横向断面的数量分别为108、105个,由此可知用于对比的中桩高程个数不多,无法得到准确的高程误差范围,因此本次试验将工点A、B、C、D区域内全部中桩高程进行综合分析,得出其误差为10.1 cm,并通过对比现场测量的高程,得出误差范围为17.3~1.2 cm。
根据中桩坐标和野外实际中桩测量时距离中桩的长度,将各地形变化点之间的高差从LiDAR内进行采集,同时对比现场勘测所得的高差,得出本次试验105个横向断面的中误差变化范围为10.7~2.4 cm。
2.3 精度评价
(1)根据上述可知,本次LiDAR试验中地形图平面位置的平均误差为4 cm,误差范围为7.6~0.5 cm。工点A、B、C、D均在同一基础控制点进行勘测,同时本次试验使用J2级全站仪将控制点的水平角、垂直角、距离进行了一次回测,确定了勘测过程中基础控制点的自身误差并未引起点云控制点产生误差。而造成地形图平面位置出现误差的主要原因为点云控制点的大小、测量精度以及扫描时数据处理引起误差。分别以本次试验点云控制点的测量精度m误差=3 cm、实际测量标记点的对点误差m对点=3 cm、点云控制点对中标记误差m标记=1.5 cm为例,可计算出其主要原因造成的误差m扫描。
通过LiDAR扫描所得的各精度进行对比,发现其对点精度为影响点云控制精度的主要原因。
(2)由LiDAR扫描地形散点形成数字地面模型的平面上截取工点A、B、C、D地形图的高程精度平均误差为11.7cm,而实际测得工点A、C、D的高程中平均误差分别为10.1cm、10.5cm、10.4cm,将两者进行对比发现扫描所得平面位置的误差较
大。根据高差互差表可知,LiDAR扫描内插高程整体上大于实际现场测量的高程,而造成其误差的原因大致为:扫描范围内植被大多为低矮的草科植物,导致数据处理时数值不能准确及时的修改;现场勘测地形散点中使用的对中杆实际上可能处于地面内。此外,测得纵向断面的精度、误差分布情况类似于LiDAR扫描地形散点的高程。
(3)本次试验共计扫描105个横向断面,其误差的范围为10.7~2.4 cm,与地形平面测量、中桩高程测量相比,其精度明显高于两者,造成这一现象的主要原因为横向断面是以地形变化点之间的相对高差进行测量的。
(4)通过试验分析可知,使用LiDAR扫描形成数字地面模型的平面精度明显要优于高程精度,该扫描技术基本能够满足公路工程中测量精密地形图与纵、横向断面所需的要求。
3 结 论
(1)在LiDAR系统扫描过程中,造成地形图平面位置出现误差的原因为点云控制点的大小、测量精度以及扫描时数据处理引起误差。
(2)通过试验可知,使用LiDAR扫描形成数字地面模型的平面精度明显要优于高程精度,因此LiDAR扫描技术满足公路工程中精密地形图与纵、横向断面测量所需的要求。
(3)LiDAR扫描系统进行地面测量时,如需进一步提高平面测量的精度,应优先考虑云控制点精度的提高。
[1] 杨少伟,吴明先,符锌砂.道路勘测设计[M].北京:人民交通出版社,2009.
[2] 吴芬芳,李清泉,熊卿.基于车载激光扫描数据的目标分类方法[J].测绘科学,2007,32(4):75-77.
The application of LiDAR technology in engineering survey
JIA Jun
(Shanxi Traffic Vocational And Technical College, Jinzhong,Shanxi 030619,China)
Collect many LiDAR point cloud data based on the highway engineering survey project. Combine and analyze the DTM got by scanning and the site survey data. Study shows the accuracy and influence factors when using the LiDAR scanning technology into engineering survey. As well discuss the feasibility that use the technology into engineering survey.
LiDAR technology; engineering survey; feasibility
2015-07-08
贾军(1978-),男,山西太原人,讲师,研究方向:工程地质和工程测量。
U412
C
1008-3383(2016)02-0001-02
