介电弹性材料驱动器在机器人中的应用进展
2016-05-09郭闯强吴春亚张子健
郭闯强,吴春亚,邹 添,张子健,刘 宏
(机器人技术与系统国家重点实验室(哈尔滨工业大学),150080哈尔滨)
介电弹性材料驱动器在机器人中的应用进展
郭闯强,吴春亚,邹添,张子健,刘宏
(机器人技术与系统国家重点实验室(哈尔滨工业大学),150080哈尔滨)
摘要:简要介绍介电弹性材料驱动器的基本原理、结构组成及其在机器人中的应用现状,重点分析介电弹性材料性能的理论研究进展,包括材料特性、本构理论、失效模式及稳定性等.总结介电弹性材料驱动器对柔性电极性能的要求,并对柔性电极工艺特性进行具体分析,深入探讨介电弹性驱动器目前所面临的挑战,对介电弹性材料驱动器在机器人系统中的应用前景进行了展望.
关键词:机器人;介电弹性材料;驱动器;人工肌肉;柔性电极
从空间机器人到医疗机器人,都要求驱动和组件具有简单、鲁棒、轻质、价廉和容易控制等优点.长期以来,研究人员多致力于金属、陶瓷等“硬质材料”的应用研究;然而,自然界中动、植物的结构和动力源通常是“软质材料”.在人类制造出的“软质材料”当中,高分子聚合物是其中典型的代表[1].软质材料能够在外部机械力、电磁力、热应力和化学反应等的作用下产生一定程度的变形而体现出活性.这些能够对外部环境的刺激进行适当的判断和响应,并具备执行能力的软质材料称为软质智能材料.与传统硬质智能材料相比,软质智能材料具有承受变形更大、生物亲和性更好等特点,且质量轻,成本低.由于软质智能材料的变形能力和驱动力接近于生物肌肉,在智能机器人领域将具有非常广阔的应用前景.作为新型软质智能材料的典型代表,电活性聚合物(electroactive polymer EAP)逐渐显现出其与生俱来的优越性[2].介电弹性材料(dielectric elastomer DE)是EAP材料的典型代表,该材料能够在外部电场应力的作用下产生大幅度形状变化[3].与压电陶瓷(piezoelectricity PE)、形状记忆合金(shape memory alloy SMA)等传统硬质功能材料相比,DE材料具有变形大(最大面积应变可达380%)、响应迅速(微秒级)、机电转换效率高(最高达90%)、功耗小(mW级别)、质量轻、柔性好等优点,详细信息如表1所示.DE材料逐渐成为柔体机械和软物质科学等世界前沿科学与技术发展领域中备受高度关注的研究对象,该材料对传统机、电驱动方式所带来的革命性的意义及其自身所蕴藏的巨大发展潜力,受到《Science》等国内外著名科学期刊的广泛关注,并得到了大量积极评价[4-5].该材料在柔性机器人[6]、自适应光学、球囊导管、盲文显示和能量收集等领域都具有广阔的应用前景.
本文首先概述了介电弹性驱动器的基本原理、主要结构形式以及在机器人领域的应用现状;然后,重点分析了DE材料的理论研究进展,包括超大变形理论,预拉伸、温度、电压、电压频率对DE材料的影响,失效理论等,并介绍了DE驱动器柔性电极的研究进展;最后,对DE驱动器在机器人领域的应用前景进行了展望.

表1 DE与传统功能材料的性能比较
1 DE驱动器的基本原理
以DE材料为基础制作的驱动器,通常是在DE材料上下表面均匀涂上柔性电极构成三明治结构,如图1所示.当在DE材料两侧电极施加了电压U和在x、y、z方向分别施加预应力Fx、Fy、Fz后,DE材料的两个表面由于极化效应分别积累了正、负电荷,正电荷和负电荷之间将相互吸引产生静电库仑力.因为DE材料具有保持恒定体积的特性,在厚度方向上受力压缩的同时平面面积将出现扩张,因此产生驱动力.如果单方向施加预应力,则面积扩展趋向于预应力方向.
根据Maxwell应力原理,DE材料在z方向受到挤压,其在z方向受到的应力可以表述为

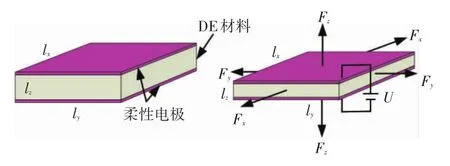
图1 DE材料电致变形工作原理
式中: Fz为z方向所受应力,ε1为相对介电常数,ε0为真空介电常数,E为施加的电场,V为施加的电压,h为聚合物薄膜厚度.从式(1)中可以看出,要想加大z方向的压缩量而得到其他方向的扩张量,则需要尽可能地增大施加电压值,而z方向的最大压缩量受机械强度限制而不能无限制增大;因此,需要多层叠加结构来提高驱动力或扩大变形范围.
2 DE驱动器在机器人领域的应用
DE驱动器弹性模量小,能量密度大,质量轻,成本低,变形范围大和输出力大,拥有较为广阔的应用前景,主要包括泵和阀门[7]、盲文计算机交互[8-9]、可穿戴硬件和生理传感器[10]、智能表面或皮肤[8]、仿生[11-12]、虚拟现实触觉交互[13-14]、扩声器[15]、柔性可充气太空反镜[16]、MEMS、移动机器人和机械臂[17-18]等应用领域.
目前,DE驱动器主要有菱形、卷轴型、平面纤维、堆叠、螺旋、锥形、平面多段等结构形式,表2详细对比分析了这些结构形式的特点,其中卷轴结构能够实现多个自由度运动,且输出最大力达到15 N,从而展现出DE驱动器的巨大应用潜力.
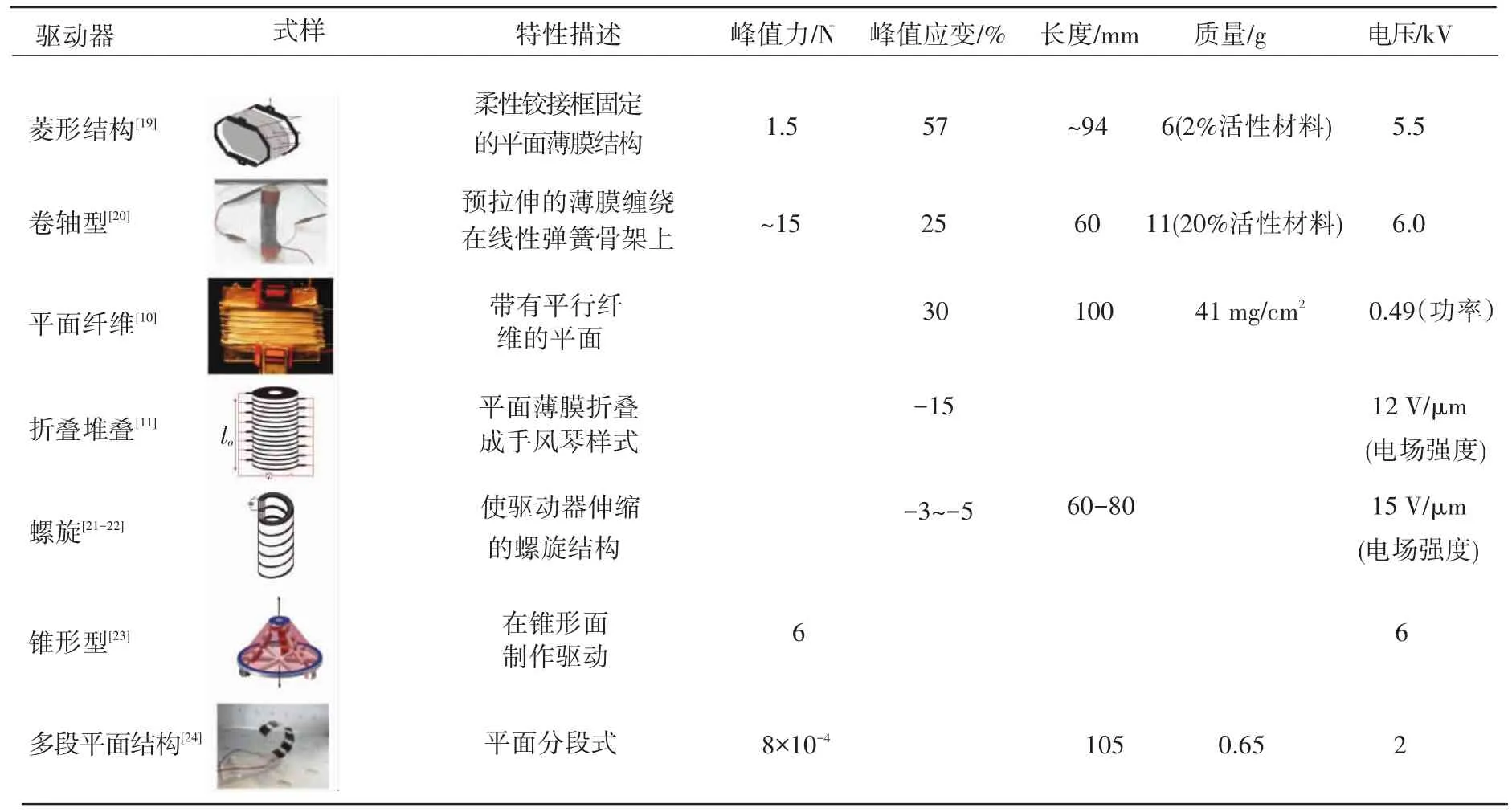
表2 典型DE驱动器及特点
2.1 DE驱动器在类人机器人中的应用
介电弹性体的可塑性、可控制性以及被动柔顺等特性,逐渐在人造假肢和类人机器人的快速发展中显现出推动作用.如图2所示,美国汉森机器人技术公司于2005年11月在韩国釜山APEC最高首脑会议上展示了DE材料在类人面部表情控制领域应用的潜力,它能够模仿爱因斯坦的面部表情,表现出喜、怒、哀、乐等丰富的情绪,从而引起世界范围内的广泛关注[25].人们设计研制各种类型的机器人都是希望它们具备一定的力、位输出能力,从而能够完成某些操作工作.图3给出的是基于介电弹性体驱动的人工肌肉手臂,它与17岁女学生进行了长达26 s的掰手腕比赛,显示出介电弹性体在人工肌肉、仿生领域的巨大应用潜力,这是一个重要的里程碑[26].

图2 基于介电弹性体的面部表情驱动[25]
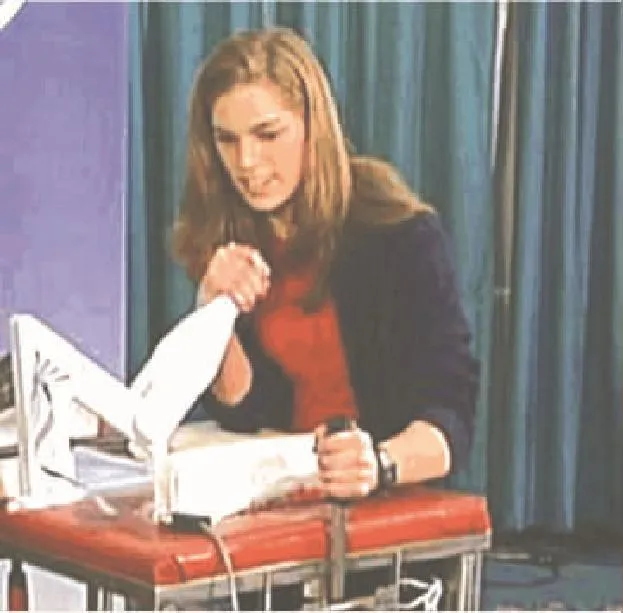
图3 基于介电弹性体的人工肌肉手臂[26]
2.2 DE驱动器在仿生机器人中的应用
获得与生物体性能相媲美的仿生机器人是研究人员不懈追求的终极目标.自然界生物体的肌肉除了能够提供动力之外,还能够起到重要的支撑作用,并且它的刚度和硬度具有无级变化的特点.为达到理想的仿生学性能,研究人员期望所采用的驱动方式能够拥有生物体肌肉的重要特征,包括驱动方式、出力大小、反应速度和工作效率等方面.具有“人工肌肉”之称的DE材料已经在仿生机器人领域得到初步应用.
图4是类昆虫爬行机器人[20],其动力来源于DE材料制成的卷型驱动器.图4(a)中机器人的每个“腿”,采用了2个仅能够实现沿着轴线方向伸缩运动的单自由度驱动器,共用了12个驱动器,机器人运行速度为3.5 cm/s;图4(b)采用6个同样的驱动器实现了机器人的运动,运行速度达到7 cm/s;图4(c)采用了6个2自由度卷型驱动器,运行速度达到了13.6 cm/s[27].

图4 基于DE材料的仿生机器人[27]
上述卷形驱动器主要由柔性支架、DE材料薄膜(被动薄膜)和柔性电极(主动薄膜)等3大部分构成.首先,通过支架对被动薄膜施加一定的预紧力,并且在它的两个平面上印制特定图案的主动薄膜;然后,在维持预紧力的条件下将其卷在柔性支架上并加以固定,从而完成驱动器的制作.通过设计主动薄膜图案,卷形驱动器可以实现不同自由度配置,图5给出了3自由度4相卷形驱动器的制作过程[27].柔性支架在驱动器中起到支撑作用,是驱动器实现往复运动的基础,根据其结构形式的不同可分为弹簧式、枢轴式和脊柱式等,分别如图6(a)、图6(b)和图6(c)所示.弹簧式具有轴向伸缩和侧向弯曲的能力,但弯曲的角度有限;枢轴式和脊柱式只能够弯曲,但由于支架之间距离较大,因此能够弯曲很大的角度(达到270°,见图7),其中枢轴式能够向各个方向弯曲,脊柱式虽然只能够单方向弯曲但是制作要比枢轴式容易.
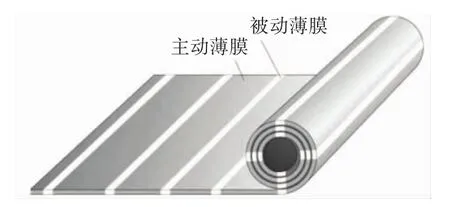
图5 卷形驱动器的制作过程[27]
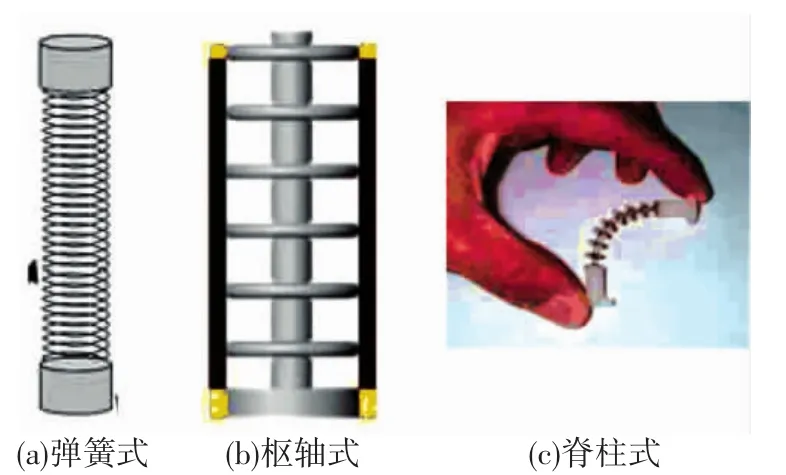
图6 柔性支架的结构形式[27]
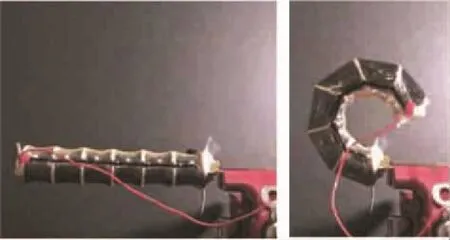
图7 枢轴结构支架驱动器[27]
2.3 DE驱动器在飞行机器人中的应用
DE材料所固有的重量轻和柔性好等优点使其在航空、航天等领域同样具有广阔的应用前景.国内外主要的航空航天研究机构都已经积极开展了DE驱动器在飞行机器人中应用的探索研究,并取得一系列研究成果.
图8(a)给出了Jun[28]等设计的一种基于DE材料的双向驱动驱动器,并通过在支架中设计柔性铰链使其具有折叠的能力.该驱动器外围尺寸为70 mm× 130 mm,已经用于翼展为400 mm、质量130 g飞机模型的副翼,并进行了飞行试验,如图8(b)所示.
如图9(a)所示,瑞士联邦材料测试研究实验室于2007年研制出基于DE材料制作的飞艇舵机驱动器,并能够实现飞艇转向的自由控制[29];从2002年开始,美国俄亥俄航天局开始了新概念飞行器——固态飞行器SSA的研究[25],该飞行器的模型如图9(b)所示,采用DE材料进行驱动,并由柔性太阳能薄膜提供动力.
2.4 DE驱动器在空间机器人中的应用
随着人类发射卫星数量的大幅度增加,空间运行轨道变得越发拥挤,移除废弃卫星等空间碎片的任务日益紧迫.由于这些非合作目标没有设计对接接口,急需一种通用性强、质量轻便、可重复利用的软捕获系统.对卫星结构分析可发现,太阳能帆板、通讯天线等是卫星表面必备的大型功能部件,通过杆件结构与卫星本体相连接,且连接处的尺寸远小于部件本体的尺寸.如果能够开发出在3维空间内自由弯曲变形的机器人,将连接杆件缠绕、固定,则可实现对目标卫星的捕获,且不需要机器人本体精确的位姿控制,通用性强、可反复使用.因此,基于软体机器人的空间目标捕获机构具有较大应用前景,吸引了国内外研究机构的广泛关注.
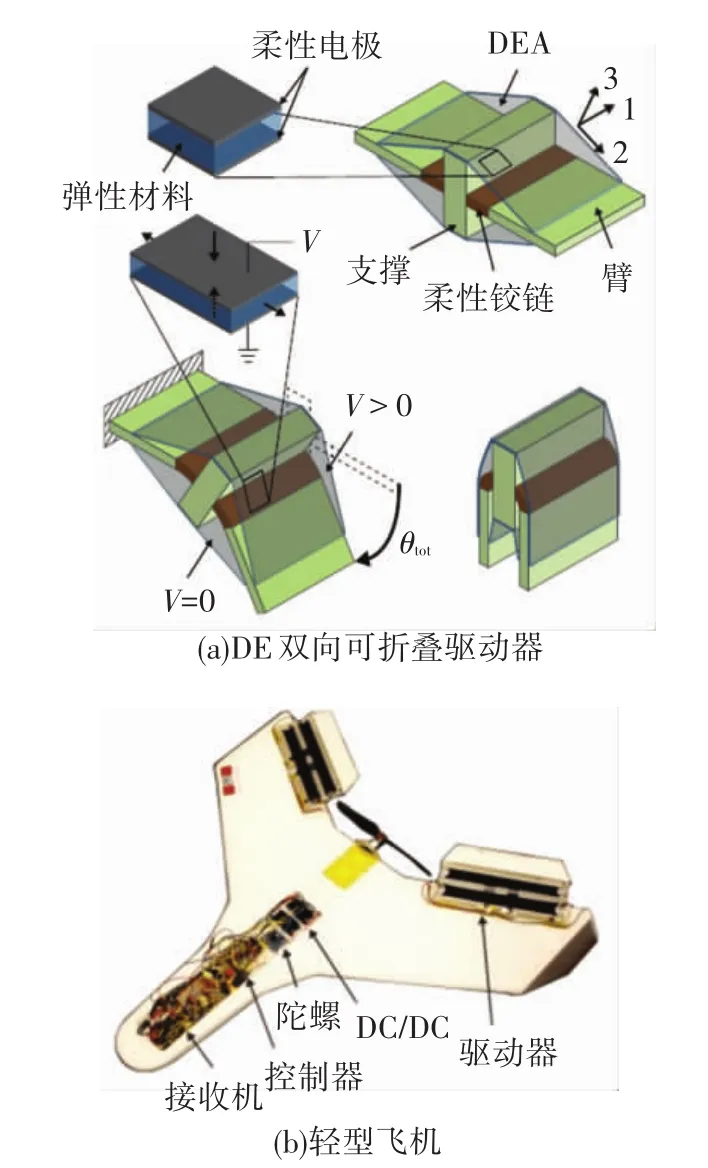
图8 DE双向可折叠驱动器和应用的轻型飞机[28]
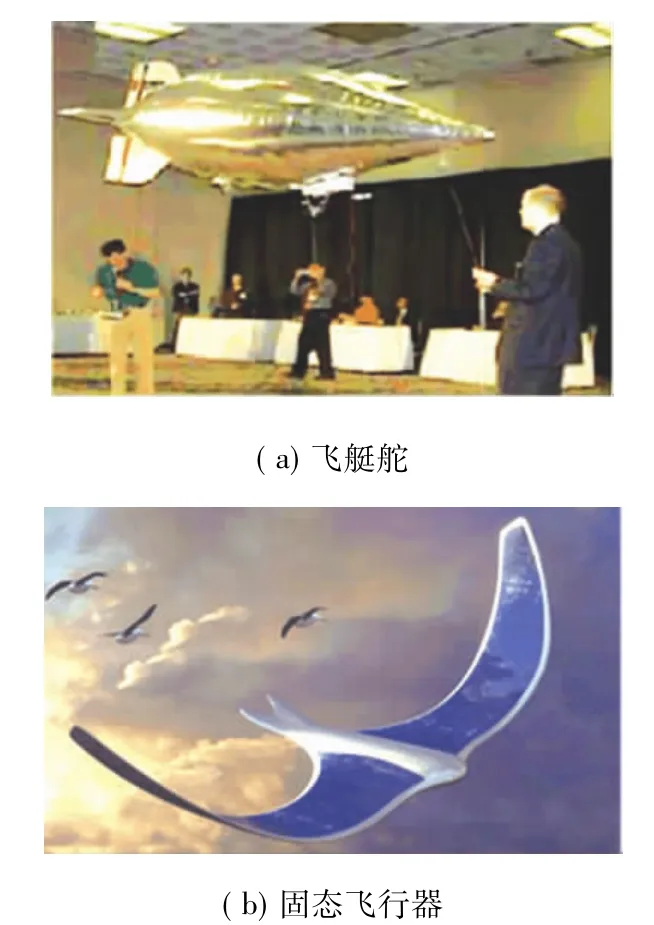
图9 基于电活性聚合物的飞艇舵[29]和固态飞行器[25]
瑞士宇航中心与研究机构合作开发了一种碎片清理卫星——CleanSpace One.该卫星采用了一种基于DE材料的多段柔性轻质捕获机构,该捕获机构可以抓取小的卫星或碎片而不产生新的太空垃圾,具有质量较轻,可折叠,占用空间较小,并且对于空间碎片的外形具有顺从的特性[24].该捕获机构能够多次反复使用,通用性强.图10(a)为卫星概念图,在卫星的前端安装有该DE材料捕获机构; 图10(b)为拟抓取的目标;图10(c)为研制的多节式夹持器实物图;图10(d)给出了该夹持器的工作过程示意.在随卫星发射过程中,夹持器处于卷曲状态(阶段1) ;卫星入轨后夹持器被释放,在弹性势能的作用下恢复至初始状态(阶段2) ;当接近目标卫星时,给夹持器施加电压,使其进一步展开(阶段3) ;当目标物体进入捕获范围后,夹持器电压卸载,在自身弹性势能作用下可将目标捕获并固定(阶段4与5).目前,已制作出夹持器样机用于概念验证,经测试,该样机的结构质量仅有0.65 g,然而最大弯曲角≮60°,最大夹持力为2.2 mN.
2.5 DE驱动器在力反馈控制中的应用
人机交互是目前影响机器人推广应用的主要问题,力反馈手套能够直接向操作员反馈机器人与环境之间力的交互作用信息,在机器人控制、虚拟现实、宇航员训练等领域具有较大的应用前景.目前,基于传统机械结构的外骨骼力反馈手套体积较为庞大,应用不便.为了解决这个问题,Zhang等[13]开发了基于DE驱动器的力反馈手套,如图11所示.当手处于自由运动状态时,通过力补偿来抵消手套应力的影响;当被控对象与环境接触时,则限制人手的运动,从而给人以机器人与环境之间接触力的反馈.然而,由于DE材料具有较大的非线性特征,DE驱动器的力、位置难以精确控制,给精确的力、位反馈控制带来了较大的困难[30].

图11 基于DE驱动器的力反馈手套[13]
3 DE材料及其理论的研究进展
3.1 DE材料及特性
目前,大部分研究是围绕聚丙烯酸酯(Acrylic)和硅橡胶(Silicone)两类主要的DE材料开展的,这两类材料在应力响应方面都展现出巨大的潜力,具有应变大、频率响应快等优点,详细信息见表3[31].Acrylic主要是3M公司生产的VHB-4905/ VHB4910系列压敏人造橡胶粘贴薄膜[32-33].可以在市场上以胶带的形式购买到厚度为100~1 000 μm、长度和宽度几百mm的Acrylic薄膜,然后裁剪成不同的形状加以使用,由于该薄膜的两侧都有粘接剂,有利于柔性电极的附着,相对于硅橡胶应用会更为方便.Silicone主要有Nusil R31-2186、CF19-2186、Dow Corning HS3[34-35]等,需要一定比例的软化剂、硬化剂等催化剂,并在特定的模具中固化来获取需要的形状,能够更加灵活地获取不同形状和机电特性的弹性体.通过调研,这两种DE材料的特点总结如下:
1)两者都需要较高的驱动电压(>1 000 V) (成为限制其推广应用的主要原因之一) ;
2) Acrylic的应力响应能力比Silicone要好,而Silicone的相应速度要比Acrylic快;
3)试验研究发现,预拉伸能够显著提高DE材料的机电稳定性[36].Silcone相对于Acrylic对预应力要求较低,在较小或没有预应力条件下也能够表现出适中的驱动应变;
4)测试发现VHB4910的介电常数对低频电压依赖性不强,但高频时随着频率的变化较为明显[37-40].Silicone相对于Acrylic具有较低的黏弹性,因此能够工作在更高的频率;
5) Acrylic的特性随着温度会产生较大的变化,而Silicone则没有表现出这一缺点,其弹性能在很宽的温度范围内保持稳定[6],更适合驱动器设计.
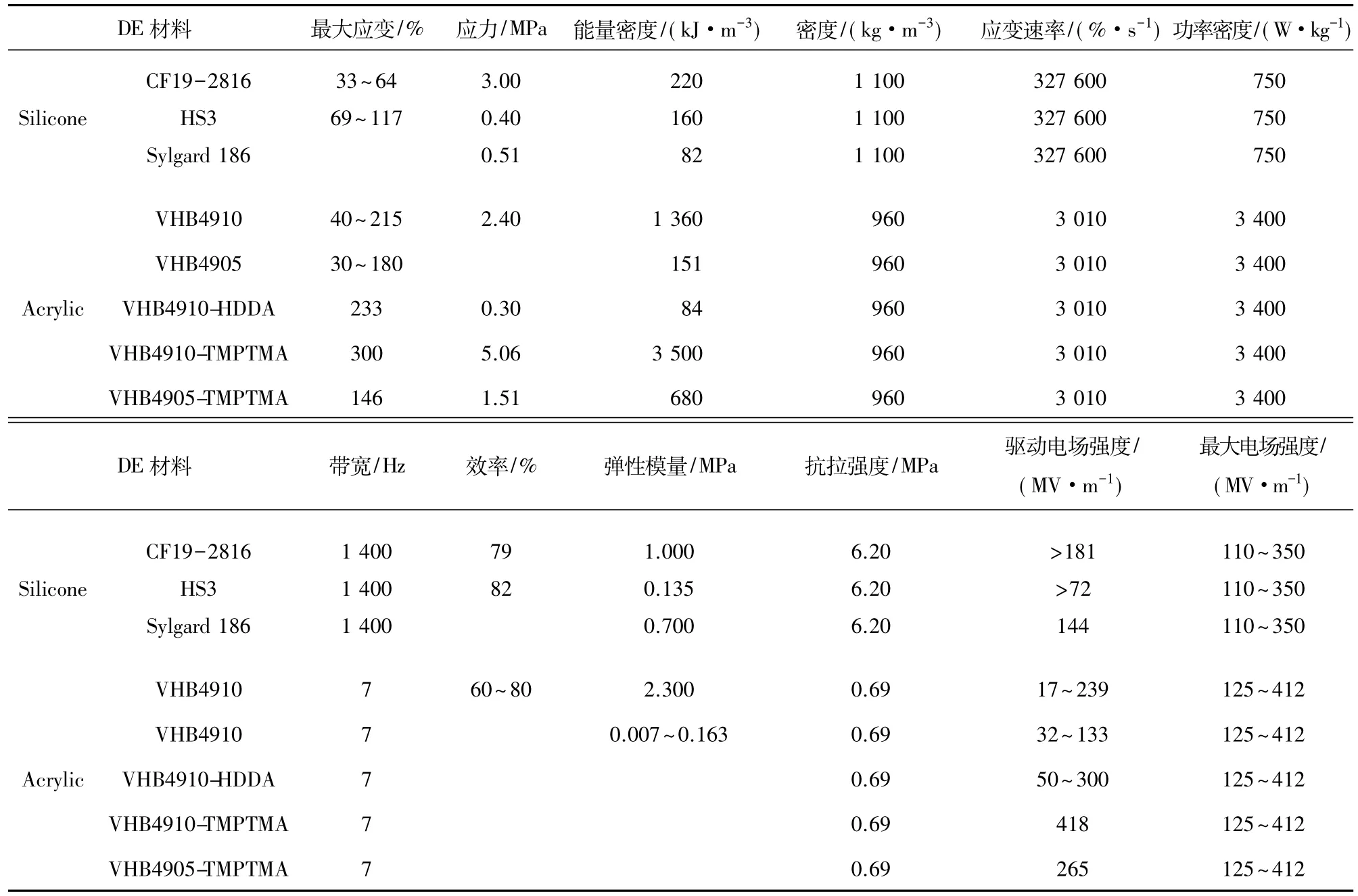
表3 常用DE材料特性信息[31,41]
3.2 DE材料本构理论研究进展
DE属于大变形超弹性材料,关于DE材料的非线性大变形理论的研究一直是该领域的热门方向,目前主要有3种代表性的研究方法.
1)基于超弹性或粘弹性理论来建立介电弹性体的本构关系[2],主要有Yeoh模型、Mooney-Rivlin模型和Ogden模型等[42].Yeoh模型为高阶模型且涉及的参数很多; Kofod通过进行丙烯酸单向拉伸实验,证明了包含有4个参数的Ogden模型能够与实验结果较好吻合[43],较高阶的参数可得到更精确的解;然而,由于要求在用户所期望的变形范围内有足够的数据,实际很难做到对大量参数进行精确估计.Mooney-Rivlin模型假定应变能密度是主应变常量的一次项函数,虽然能够较好地描述橡胶类超弹性体材料在大变形下的力学特性,但结果不够精确[44].Lochmatter等[45]基于超弹性理论研究了DE平面驱动器的力学行为; Yang[46]、Plante[47]、Wissler等[48]分别提出了DE材料环形驱动器、圆形驱动器和菱形驱动器的粘弹性解析模型.
2)基于经典连续介质力学和麦克斯韦-法拉第电磁学理论建立DE材料机电耦合系统的基本理论框架[2].主要代表性成果如下: Goulbourne等[49]综合考虑材料非线性、几何非线性和机电耦合场作用,推导出DE材料的本构关系; Dorfmann等[50]提出了非线性弹性电介质的基本理论框架,用于求解电场对系统性能影响的边界值问题; Mcmeeking等[51]给出了电介质、电极和环境所构成的热力学系统在等温过程中的能量平衡方程; Trimarco等[39]提出了弹性固体的拉格朗日静电学理论框架,推导出应力张量的解析表达式.
3)基于热力学理论,建立可变形电介质的热力学理论框架[2].Harvard大学Suo教授团队[52]基于热力学自由能理论,提出了电活性聚合物的非线性本构方程,该方程能够实现对电活性聚合物力电耦合过程的理论分析,且具有明确的物理意义,已经得到国内外广泛认可.基于该理论框架,Liu等[53]进一步结合超弹性理论、机电耦合理论以及实验测试数据,推导出不同条件下的本构关系.
3.3 DE材料失效模式及稳定性研究进展
3.3.1 DE材料失效模式
DE驱动器是一种基于电致变形原理的驱动器,虽然能够在电场下产生较大的变形,但在发生形变的过程中还可能会发生多种失效破坏模式,主要有电击穿、力电耦合失稳、强度破坏和褶皱等[41].这些失效现象在一定程度上制约了DE驱动器的推广应用[54-55].
3.3.1.1电击穿
当DE薄膜两侧所施加的电场过大时,高电压会使DE材料中的带电微粒发生位移,并逐渐形成电流通路,此时DE薄膜由介电状态变为导电状态,即发生电击穿.研究表明,DE的电击穿强度与预拉伸、材料薄膜的厚度、材料的刚度等有关,适当施加预拉伸有利于提高电击穿强度[56-57].
3.3.1.2力电耦合失稳
当DE薄膜两侧电极施加电压时,DE薄膜的厚度将在电场应力的作用下受挤压而变薄,薄膜两侧电极的间距变小,电场强度随之变大,进一步压缩DE材料薄膜的厚度,从而形成一种正反馈作用过程.如果施加的电压过大会使DE材料内部分子链塌陷,造成材料内部特性的破坏,即产生力电耦合失稳现象.
3.3.1.3强度破坏
受材料机械强度的限制,当DE材料在外力(预拉力、电场力)作用下产生的变形过大时,就会发生强度破坏,造成材料撕裂.
3.3.1.4褶皱
DE材料在外力作用下所承受的应力超过薄膜的第三原理应力时,会产生褶皱现象[47],如图12所示,褶皱现象一般在撕裂之前出现.
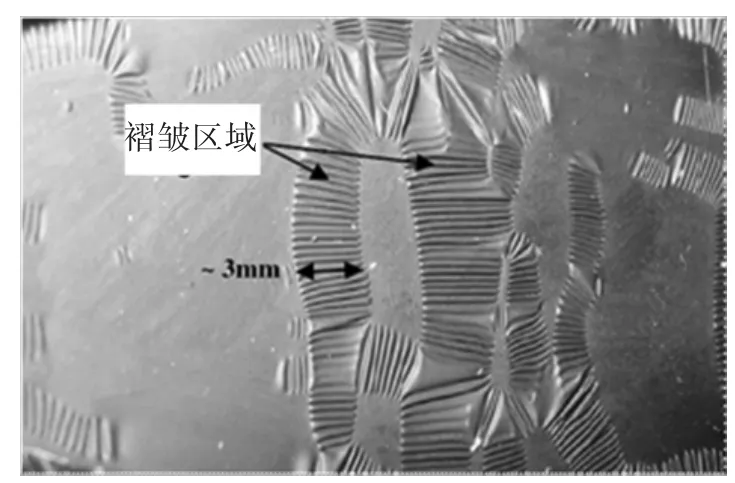
图12 DE材料褶皱现象[47]
综上,DE材料不仅存在上述多种失效模式,且各种失效模式之间还存在着耦合和相互转化的过程,只有对这些问题进行深入理解,并掌握其运行规律,才能进一步推进DE材料的发展[47,58].为此,国内外大量学者针对介电弹性材料的稳定性开展了广泛而深入的研究.
3.3.2 DE材料稳定性研究进展
Zhao等[59]提出应用自由能分析介电弹性体机电稳定性的方法,以Neo-Hookean弹性应变能为例,给出了介电弹性体所承受的名义电场和产生的名义电位移之间的关系,理论证明了预拉伸在提高DE材料机电稳定性上的显著作用,且理论计算出的临界击穿电场能够与实验测试结果很好吻合.Liu等[60]应用Mooney-Rivlin弹性应变能模型对介电弹性体的机电稳定性行为进行分析发现:随着材料常数比K的增大,不同类型或结构的介电弹性体机电稳定性将逐渐增强.Norrisa[30]给出了Ogden模型的简化形式,简单、精确地描述了临界真实电场、名义应力与拉伸率之间的关系.
大量研究表明,介电弹性体在经历大变形时,自身的变形会对介电常数产生影响.Zhao等[61]将介电常数拟合为依赖于拉伸的线性变化函数,Liu等[62]进一步根据实验结果用非线性变化函数来描述介电常数与拉伸的关系,并从解析表达和数值模拟两个角度对DE材料的机电稳定进行了深入、系统的研究.兰州大学的Yong等[63]分析了DE材料非均匀变形以及失稳行为,西安交通大学陈花玲等[64-65]实验验证了预拉伸、温度、电压频率等对DE材料性能的影响,并进行了深入的理论分析.
4 DE驱动器柔性电极的研究进展
DE弹性体在两个电极的电场作用下变形而产生驱动力,在整个驱动变形的过程中导电电极薄膜要求能够与弹性体均匀接触,随着弹性体变形而变形,且不产生相反的应力或丧失传导能力,因此,柔性电极性能和发展潜力也成为制约DE驱动器发展的核心因素之一.
4.1 DE驱动器对柔性电极性能的要求
DE驱动器的性能部分依赖于其使用的电极材料,电极薄膜的缺陷(凝胶颗粒、厚度不均匀、交联不均匀、应力集中)都会大幅度降低DE驱动器的性能[66],用于DE驱动器的电极需要满足以下要求[67]:
1)高柔性(如: Young氏模量<100 MPa)[68];
2)在较大应变条件下保持较小的电阻;
3)在较大应变条件下保持较高的表面密度;
4)相对于电介质薄膜具有较小的厚度;
5)能够绘制高分辨率图案;
6)对电介质层具有较好的吸附能力;
7)满足典型的DE驱动器生产工艺要求,在层叠、卷轴等过程中不易产生损坏;
8)长寿命,如在高低温、辐射等环境条件下,长期保持稳定的性能.
4.2柔性电极材料工艺性能分析
虽然DE驱动器的响应频率受电极的充电时间和电阻的影响,但更受制于高粘性材料的机械响应时间,因此,DE驱动器电极的柔性是驱动器设计需要考虑的主要因素,而相对较低的传导性(例如10-3s/cm)是可以接受的[68].常用的电极材料包括导电碳膏、炭黑、碳粉(含硅油或不含)、石墨粉、石墨喷雾、金、铂、银等,这些电极材料的特性和优缺点详见表4[69].
碳膏是最常用的柔性电极解决方案,能够在较大的应变条件下保持良好的传导特性.碳膏便宜且容易获得,并且能够在大多数的DE材料上具有较好的粘附性的同时对于驱动特性的影响最小;但是碳膏属于“湿”性电极,随着时间的推移会变干,应用寿命较短,且较难均匀地制成很薄的导电层.干石墨和碳粉同样具有便宜、易于操作的优点,相对于碳膏这种干粉末材料更加适合制成多层驱动器(碳膏会在驱动器变形过程中产生滑动而导致厚度不均匀) ;然而碳粉等电极的导电性会随着变形量的增大而减小直至丧失,另外同样较难均匀地制成很薄的导电层[70].文献[67]通过对比粉刷和溅射石墨工艺的效果,指出溅射石墨得到电极的电阻是前者的2倍以上,且不是同质分布.
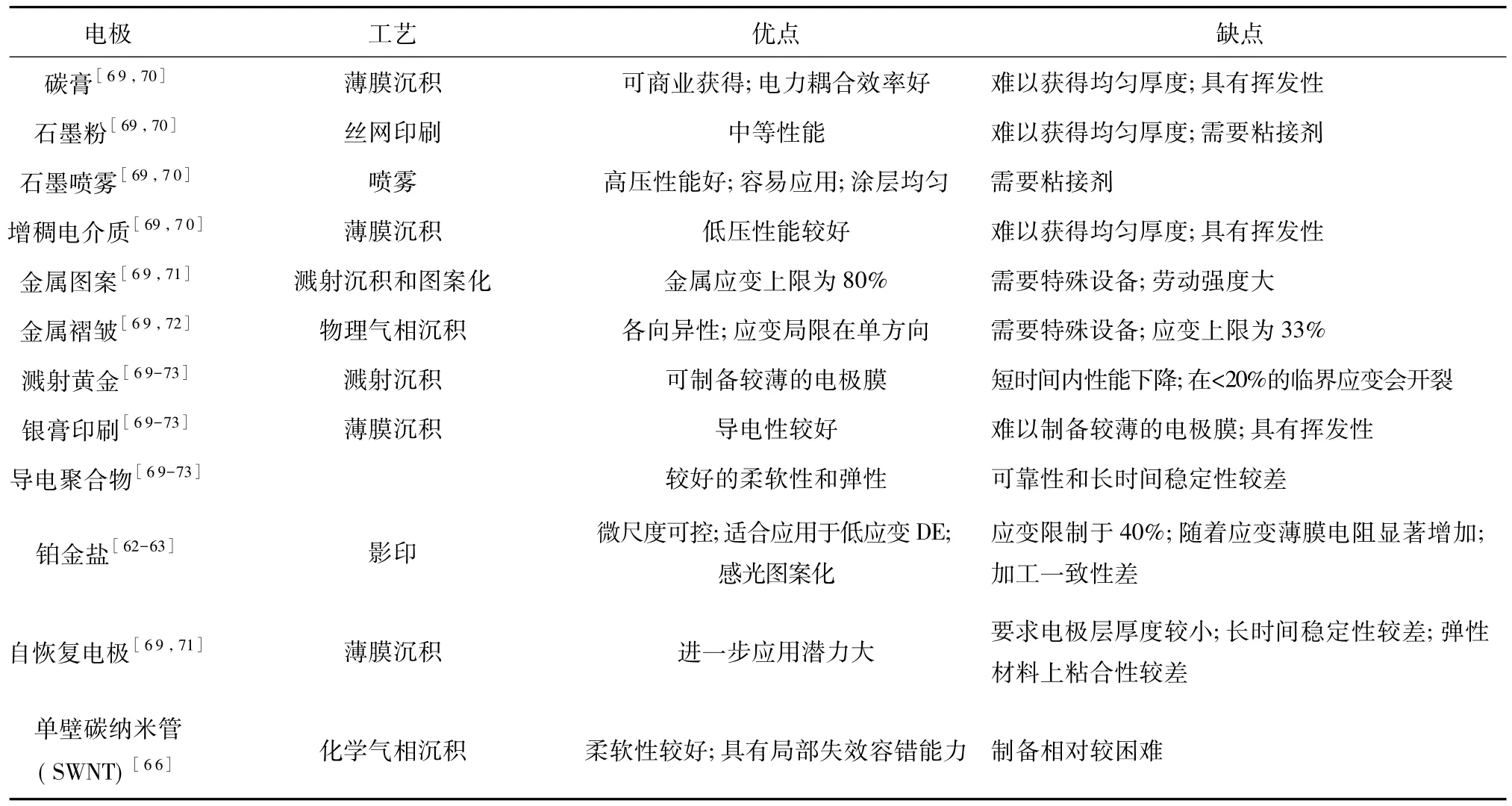
表4 常用电极材料特性
Benslimane等[72]采用物理气相沉积方法在DE薄膜上绘制特殊设计的金属褶皱图案,这种银电极只能在褶皱的方向延伸,最大应变达到了33%,但是制备相对较为困难.与之相似,Trujillo等[73]采用溅射的方式在DE薄膜上制作了金电极波纹,产生的应变达到20%.Yuan等[66]采用的单壁碳纳米管(SWNT)制作的具有自我清洁能力的柔性电极,具有更好的容错能力.最近研究表明,制备多层DE驱动器时,建议采用导电粘合剂喷雾工艺[62,68].
5 DE驱动器面临的技术挑战
国内外学者对于DE驱动器已开展了广泛而深入的研究,但是目前的研究都是在实验室开展的,尚没有成熟的DE驱动器投入实际生产和生活应用,仍面临着大量富有挑战性的问题有待解决.除了上述DE材料、柔性电极等主要因素外,还有来自高驱动电压和精确运动控制等方面的挑战[74-75].
5.1高驱动电压挑战
开发DE驱动器主要挑战之一是需要很高的驱动电压来产生适当的形变,甚至高达150 V/μm.针对这种高电压的要求,研究者正在采取不同的方式加以解决.瑞士联邦实验室的Zhang等[76]针对预应力、电介质添加剂对硅橡胶的驱动电压的影响开展了深入研究,取得的研究成果令人印象深刻.研究发现,随着在硅橡胶中添加的硬化剂的增加,Young氏模量增加而介电常数却在下降,而Young氏模量增加和介电常数的下降又都使得驱动应力降低,介电常数与Young氏模量的比率是决定DE驱动器应力响应的关键参数.因此,不同的硬化剂含量展现出不同的应力响应特性,Zhang等[76]这一研究成果为后续研究开拓了新的领域.
5.2精确控制挑战
由于DE薄膜的弹性系数和黏滞特性的非线性特征较强,很难建立一个准确的模型来描述其动力学和相应的阻抗特性.Choi等[77]建立了弹簧-阻尼简化集总模型来描述DE驱动器的动力学特性,并通过仿真和实验进行了验证.Carpi等[78]基于小变形假设,建立了应变ε<10%条件下的螺旋驱动器的机电模型,并用以预测所施加的电压与产生的应力、应变之间关系.然而,DE驱动器要实现位置、力的精确控制还有很长路要走[79].
6 结论及展望
本文简要描述了介电弹性材料作为一种新型的驱动器在机器人领域的应用进展,给出了DE驱动器的基本原理和常见结构形式.对比分析了几种常用DE材料的特性,从材料特性、本构理论、失效模式和稳定性等方面总结了DE材料驱动器的理论研究进展,说明了DE驱动器对柔性电极的要求和柔性电极研究进展,分析了DE驱动器面临的挑战及发展方向.
DE材料作为一种新型的驱动方式吸引了大量学者开展广泛而深入的研究,DE材料初步展现出其内在的大变形、生物亲和性好,轻质廉价等特点,并在多种领域得到初步应用,但是DE驱动器真正进入生产和生活还需要克服诸多挑战.
参考文献
[1]SUO Z G.Theory of dielectric elastomers[J].Acta Mechanica Solida Sinica,2010,23(6) : 549-578.
[2]刘立武,李金嵘,吕雄飞,等.电活性介电弹性体的本构理论和稳定性研究进展[J].中国科学(技术科学),2015,45(5) : 450-463.
[3]de GENNES P G.Soft matter[J].Reviews of Modern Physics,1996,64(3) : 645-648.
[4]JOHN D M.Motor robots: motor challenges and materials solutions[J].Science,2007,318(5853) : 1094-1097.
[5]FEDERICO C,SIEGFRIED B,DANILO D R.Stretching dielectric elastomer performance[J].Science,2010,330 (6012) : 1759-1761.
[6]AILISH O,HALLORAN,FERGAL O,et al.A review on dielectric elastomer actuators,technology,applications,and challenges[J].Journal of Applied Physics,2008,104(7) : 071101.
[7]PRAHLAD H,PELRINE R,KORNBLUH R,et al.Programmable surface deformation: thickness-mode electroactive polymer actuators and their applications [C]/ /Proceedings of SPIE-The International Society for Optical and Engineering,Smart Structures and Materials 2005-Electroactive Polymer Actuators and Devices (EAPAD).San Diego: SPIE,2005: 102-113.
[8]SCHLAAK HF,JUNGMANN M,MATYSEK M,et al.Novel multilayer electrostatic solid-state actuators with elastic dielectric[C]/ /Proceedings of SPIE-The International Society for Optics and Engineering,Smart Structures and Materials 2005-Electroactive Polymer Actuators and Devices (EAPAD).San Diego: SPIE,2005: 121-133.
[9]CHOI H R,LEE S W,JUNG K M,et al.Tactile display as a braille display for the visually disabled[C]/ /2004 IEEE/RSJ International Conference on Intelligent Robots and Systems.Piscataway: IEEE,2004: 1985-1990.
[10]BOLZMACHER C,BIGGS J,SRINIVASAN M.Flexible dielectric elastomer actuators for wearable human-machine interfaces[C]/ /Proceedings of SPIE-The International Society for Optics and Engineering,Smart Structures and Materials 2006-Electroactive Polymer Actuators and Devices(EAPAD).San Diego: SPIE,2006: 27-38.
[11]CARPI F,de ROSSI D.Contractile dielectric elastomer actuator with folded shape[C]/ /Proceedings of SPIE-The International Society for Optics and Engineering,Smart Structures and Materials 2006-Electroactive Polymer Actuators and Devices (EAPAD).San Diego: SPIE,2006: 99-104.
[12]CARPI F,FANTONI G,GUERRINI P,et al.Buckling dielectric elastomer actuators and their use as motors for the eyeballs of an android face[C]/ /Proceedings of SPIE-The International Society for Optics and Engineering,Smart Structures and Materials 2006-Electroactive Polymer Actuators and Devices(EAPAD).San Diego: SPIE,2006: 61681A.
[13]ZHANG R,KUNZ A,LOCHMATTER P,et al.Dielectric elastomer spring roll actuators for a portable force feedback device[C]/ / 2006 14th Symposium on Haptic Interfaces for Virtual Environment and Teleoperator Systems.Washington DC: IEEE Computer Society,2006: 347-353.
[14]ZHANG R,LOCHMATTER P,KUNZ A,et al.Spring roll dielectric elastomer actuators for a portable force feedback glove[C]/ /Proceedings of SPIE-The International Society for Optics and Engineering,Smart Structures and Materials 2006-Electroactive Polymer Actuators and Devices(EAPAD).San Diego: SPIE,2006: 61681T.
[15]HEYDT R,KORNBLUH R,ECKERLE J,et al.Sound radiation properties of dielectric elastomer electroactive polymer loudspeakers[C]/ /Proceedings of SPIE-The International Society for Optics and Engineering,Smart Structures and Materials 2006-Electroactive Polymer Actuators and Devices (EAPAD).San Diego: SPIE,2006: 61681M.
[16]KORNBLUH R D,FLAMM D S,PRAHLAD H,et al.Shape control of large lightweight mirrors with dielectric elastomer actuation[C]/ /Proceedings of SPIE-The International Society for Optics and Engineering,Smart Structures and Materials 2003-Electroactive Polymer Actuators and Devices (EAPAD).San Diego: SPIE,2003: 143-148.
[17]CHOI H R,JUNG K,RYEW S,et al.Biomimetic soft actuator: design,modeling,control,and applications[J].IEEE/ASME Transactions on Mechatronics,2005,10 (5) : 581-593.
[18]CHOI H R,JUNG K,CHUC N,et al.Effects of prestrain on behavior of dielectric elastomer actuator[C]/ / Proceedings of SPIE-The International Society for Optics and Engineering,Smart Structures and Materials 2005-Electroactive Polymer Actuators and Devices(EAPAD).San Diego: SPIE,2005: 283-291.
[19]WINGERT A,LICHTER M D,DUBOWSKY S.On the design of large degree-of-freedom digital mechatronic devices based on bistable dielectric elastomer actuators [J].IEEE/ASME Transactions on Mechatronics,2006,11(4) : 448-456.
[20]PEI Q,PELRINE R,ROSENTHAL M,et al.Recent progress on electroelastomer artificial muscles and their application for biomimetic robots[C]/ /Proceedings of SPIE-The International Society for Optics and Engineering,Smart Structures and Materials 2004-Electroactive Polymer Actuators and Devices(EAPAD).San Diego: SPIE,2004: 41-50.
[21]CARPI F,MIGLIORE A,SERRA G,et al.Helical dielectric elastomer actuators[J].Smart Material and Structure,2005,14(6) : 1210-1216.
[22]WACHE R,MCCARTHY D N,RISSE S,et al.Rotary motion achieved by new torsional dielectric elastomer actuators design[J].IEEE/ASME Transactions on Mechatronics,2015,20(2) : 975-977.
[23]GIOVANNI B,ROCCO V,GABRIELE V,et al.Optimal synthesis of conically shaped dielectric elastomer linear actuators: design methodology and experimental validation [J].IEEE/ASME Transactions on Mechatronics,2011,16(1) : 67-79.
[24]ARAROMI O A,GAVRILOVICH I,SHINTAKE J,et al.Towards a deployable satellite gripper based on multisegment dielectric elastomer minimum energy structures[C]/ /Proceedings of SPIE-The International Society for Optics and Engineering,Smart Structures and Materials 2014-Electroactive Polymer Actuators and Devices(EAPAD).San Diego: SPIE,2014: 90562G.
[25]BAR-COHEN Y.Worldwide electro active polymer (WWEAP)[J].Newsletter,1999,7 (2) : 1-16.
[26]BAR-COHEN Y.Electroactive polymers as artificial muscles: a review[J].Journal of Spacecraft and Rockets,2002,39(6) : 822-827.
[27]CARPI F,de ROSSI D,KORNBLUH R,et al.Dielectric elastomers as eletromechanical transducers: fundamentals,materials,devices,models and applications of an energing electroactive polymer technology[M].Amsterdam: Elsevier,2011: 91-96.
[28]SHINTAKE J,ROSSET S,SCHUBERT B E,et al.A foldable antagonistic actuator[J].IEEE/ASME Transactions on Mechatronics,2014,20(5) : 1-12.
[29]BAR-COHEN Y.World wide electro active polymer (WWEAP)[J].Newsletter,2007,9(2) : 1-15.
[30]NORRISA A N.Comment on Method to analyse electromechanical stability of dielectric elastomers[J].Applied Physics Letters,2007,92: 026101.
[31]MADDEN J D W,VANDESTEEG N,ANQUETIL P,et al.Artificial muscle technology: physical principles and naval prospects[J].IEEE Journal of Oceanic Engineering,2004,29(3) : 706-728.
[32]MIRFAKHRAI T,MADDEN J D W,BAUGHMAN R H.Polymer artifical muscles[J].Materials today,2007,10 (4) : 30-38.
[33]YANG E,FRECKER M,MOCKENSTURM E.Finite element and experimental analyses of non-axisymmetric dielectric elastomer actuators[C]/ /Proceedings of SPIE-the International Society for Optics and Engineering,Smart Structures and Materials 2006-Electroactive Polymer Actuators and Devices (EAPAD).San Diego: SPIE,2006: 61680H.
[34]KOFOD G,SOMRNER-LARSEN P.Some aspects of large strain actuation in dielectric elastomers[C]/ /2005 12th International Symposium on Electrets.Piscataway: IEEE,2005: 208-211.
[35]TANAKA T,SATO M,KOZAKO M.High field Maxwell stress-strain characteristics of conventional polymers as actuators[C]/ /2004 Annual Report Conference on Electrical Insulation and Dielectric Phenomena.Piscataway: IEEE,2004: 364-367.
[36]LI B,CHEN H L,QIANG J H,et al.Effect of mechanical pre-stretch on the stabilization of dielectric elastomer actuation[J].Journal of Physics D: Applied Physics,2011,44(15) : 155301.
[37]SOMMER-LARSEN P,KOFOD G,SHRIDHAR M H,et al.Performance of dielectric elastomer actuators and materials[C]/ /Proceedings of SPIE-The Initernational Society for Optical Engineering,Smart Structures and Materials 2002-Electroactive Polymer Actuators and Devices (EAPAD).San Diego: SPIE,2002.158-166.
[38]MCKAY T G,CALIUS E,ANDERSON I A.The dielectric constant of 3M VHB: a parameter in dispute[C]/ / Proceedings of SPIE-The International Society for Optics and Engineering,Smart Structures and Materials 2005-Electroactive Polymer Actuators and Devices(EAPAD).San Diego: SPIE,2005: 72870P.
[39]TRIMARCO C.On the Lagrangian electrostatics of elastic solids[J].Acta Mechanica,2009,204(3) : 193-201.
[40]盛俊杰,陈花玲,李博.频率对VHB4910介电弹性体材料介电性能的影响[J].功能材料与器件学报,2011,17(6) : 549-554.
[41]BROCHU P,PEI Q.Advances in dielectric elastomers for actuators and artifical muscles[J].Macromolecular Rapid Communications,2010,31(1) : 10-36.
[42]WISSLER M,MAZZA E.Modeling of a prestrained circular actuator made of dielectric elastomers[J].Sensors and Actuators A,2005,120(1) : 184-192.
[43]KOFOD G.Dielectric elastomer actuators[D].Kongens Lyngby: The Technical University of Denmark,2001: 1-83.
[44]陈明,林桂娟,宋德朝.电活性聚合物微型发电机[J].光学精密工程,2010,18(11) : 2413-2420.
[45]LOCHMATTER P,MICHEL S,KOVACS G.Electromechanical model for static and dynamic activation of elementary dielectric elastomer actuators[C]/ /Proceedings of SPIEThe International Society for Optics and Engineering,Smart Structures and Materials 2006-Electroactive Polymer Actuators and Devices (EAPAD).San Diego: SPIE,2006: 61680F.
[46]YANG E,FRECKER M,MOCKENSTURM E.Viscoelastic model of dielectric elastomer membranes[C]/ /Proceedings of SPIE-The International Society for Optics and Engineering,Smart Structures and Materials 2005-Electroactive Polymer Actuators and Devices(EAPAD).San Diego: SPIE,2005: 82-93.
[47]PLANTE J S,DUBOWSKY S.Large-scale failure modes of dielectric elastomer actuators[J].International Journal of Solids Structure,2006,43(25) : 7727-7751.
[48]WISSLER M,MAZZA E.Electromechanical coupling in dielectric elastomer actuators[J].Sensors and Actuators A: Physical,2007,138(2) : 384-393.
[49]GOULBOURNE N C,MOCKENSTURM E M,FRECKER M I.A nonlinear model for dielectric elastomer membranes [J].Journal of Applied Mechanics,2005,72(6) : 899-906.
[50]DORFMANN A,OGDEN R W.Nonlinear electroelasticity [J].Acta Mechanica,2005,174(3/4) : 167-183.
[51]MCMEEKING R M,LANDIS C M.Electrostatic forces and stored energy for deformable dielectric materials[J].Journal of Applied Mechanics,2005,72(4) : 581-590.
[52]SUO Z,ZHAO X,GREENE W H.A nonlinear field theory of deformable dielectrics[J].Journal of the Mechanics and Physics of Solids,2008,56(2) : 467-486.
[53]LIU Y J,LIU L W,ZHANG Z,et al.Dielectric elastomer film actuators: characterization,experiment and analysis [J].Smart Mater Struct,2009,18(9) : 095024.
[54]NGUYEN C H,ALICI G,MUTLU R.Modeling a soft robotic mechanism articulated with dielectric elastomer actuators[C]/ / 2014 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM). Piscataway: IEEE,2014: 599-604.
[55]KEPLINGER C,LI T,BAUMGARTNER R,et al.Harnessing snap-through instability in soft dielectrics to achieve giant voltage-triggered deformation[J].Soft Matter,2012,8(2) : 285-288.
[56]祁新梅,郑寿森,戴丰加.预拉伸电活性绝缘弹性薄膜的机电驱动特性实验及分析[J].高分子材料科学与工程,2008,24(11) : 1-4.
[57]MUFFOLETTO D P,BURKE K M,ZIRNHELD J L.Partial discharge monitoring in dielectric elastomer actuators[C]/ / 2013 19th IEEE Pulsed Power Conference (PPC).Piscataway: IEEE,2013: 1-5.
[58]BUCHBERGER G,MAYRHOFER B,JAKOBY B,et al.Dynamic capacitive extensometry setup for in-situ monitoring of dielectric elastomer actuators[C]/ /2012 IEEE International Instrumentation and Measurement Technology Conference.Piscataway: IEEE,2012: 75-80.
[59]ZHAO X H,SUO Z G.Method to analyze electromechanical stability of dielectric elastomers[J].Applied Physical Letter,2007,91(6) : 061921.
[60]LIU Y J,LIU L W,ZHANG Z,et al.Comment on method to analyze electromechanical stability of dielectric elastomers[J].Applied Physics Letters,2008,93(10) : 106101.
[61]ZHAO X H,SUO Z G.Electrostriction in elastic dielectrics undergoing large deformation[J].Journal of Applied Physics,2008,104(12) : 123530.
[62]LIU Y J,LIU L W,SUN S H,et al.Electromechanical stability of Mooney-Rivlin-type dielectric elastomer with nonlinear variable dielectric constant[J].Polymer International,2010,59(3) : 371-377.
[63]YONG H D,HE X Z,ZHOU Y H.Electromechanical instability in anisotropic dielectric elastomer[J].International Journal of Engineering Science,2012,50 (1) : 144-150.
[64]陈花玲,王永泉,盛俊杰,等.电活性聚合物材料及其在驱动器中的应用研究[J].机械工程学报,2013,49 (16) : 205-214.
[65]SHENG J J,CHEN H L,LI B.Effect of temperature on the stability of dielectric elastomers[J].Journal of Physics D: Applied Physics,2011,44(36) : 365406.
[66]YUAN W,HU L B,YU Z B,et al.Fault-tolerant dielectric elastomer actuators using single-walled carbon nanotube electrodes[J].Advanced Materials,2008,20 (3) : 621-625.
[67]SCHLAAK HF,JUNGMANN M,MATYSEK M,et al.Novel multilayer electrostatic solid-state actuators with elastic dielectric[C]/ /Procceding of SPIE-The International Society for Optics and Engineering,Smart Structures and Materials 2005-Electroactive Polymer Actuators and Devices (EAPAD).San Diego: SPIE,2005: 121-33.
[68]DELILLE R,URDANETA M,HSIEH K,et al.Novel compliant electrodes based on platinum salt reduction [C]/ /Proceeding of SPIE-The International Society for Optics and Engineering,Smart Structures and Materials Symposium: Electroactive Polymer Actuators and Devices (EAPAD).San Diego: SPIE,2006: 6168Q.
[69]BIDDISS E,CHAU T.Dielectric elastomers as actuators for upper limb prosthetics: challenges and opportunities [J].Medical Engineering&Physics,2008,30 (4) : 403-418.
[70]CARPI F,CHIARELLI P,MAZZOLDI A,et al.Electromechanical characterisation of dielectric elastomer planar actuators: comparative evaluation of different electrode materials and different counter loads[J].Sensor and Actor A,2003,107(1) : 85-95.
[71]KORNBLUH R,PELRINE R,JOSEPH J,et al.High field electrostriction of elastomeric polymer dielectrics for actuation[C]/ /Proceeding of SPIE-The International Society for Optics and Engineering,Smart Structures and Materials 1999-Electroactive Polymer Actuators and Devices(EAPAD).San Diego: SPIE,1999: 149-161.
[72]BENSLIMANE M,GRAVESEN P,SOMMER-LARSEN P.Mechanical properties of dielectric elastomer actuators with smart metallic compliant electrodes[C]/ /Proceeding of SPIE-The International Society for Optics and Engineering,Smart Structures and Materials 2002-Electroactive Polymer Actuators and Devices(EAPAD).San Diego: SPIE,2002: 150-157.
[73]TRUJILLO R,MOU J,PHELAN P E,et al.Investigation of electrostrictive polymers as actuators for mesoscale devices[J].The International Journal of Advanced Manufacturing Technology,2004,23(3/4) : 176-182.
[74]TANAKA T,SATO M,KOZAKO M.High field maxwell stress—strain characteristics of conventional polymers as actuators[C]/ / 2004 Annual Report Conference on Electrical Insulation and Dielectric Phenomena.Piscataway: IEEE,2004: 364-367.
[75]BROCHU P,PEI Q.Advances in dielectric elastomers for actuators and artificial muscles[J].Macromoleculat Rapid Communications,2010,31(1) : 10-36.
[76]ZHANG X Q,WISSLER M,JAEHNE B,et al.Effects of crosslinking prestrain and dielectric filler on the electromechanical response of a new silicone and comparison with acrylic elastomer[C]/ /Proceeding of SPIE-The International Society for Optics and Engineering,Smart Structures and Materials 1999-Electroactive Polymer Actuators and Devices(EAPAD).San Diego: SPIE,1999: 78-86.
[77]CHOI H R,RYEW S M,JUNG K M,et al.Soft actuator for robotic applications based on dielectric elastomer: dynamic analysis and applications[C]/ /Proceedings of the 2002 IEEE lntemational Conference on Robotics&Automation.Washington DC: IEEE Computer Society,2002: 3218-3223.
[78]CARPI F,ROSSI D D.Small-strain modeling of helical dielectric elastomer actuators[J].IEEE/ASME Transactions on Mechatronics,2012,17(2) : 318-325.
[79]JIANG C,TAKAGI K,SUZUKI T,et al.Experimental study of position control with tube-type dielectric elastomer actuator[C]/ /2013 International Conference on Advanced Mechatronic Systems.Washington DC: IEEE Computer Society,2013: 352-356.
(编辑杨波)
Application progress of dielectric elastomer actuators in robots
GUO Chuangqiang,WU Chunya,ZOU Tian,ZHANG Zijian,LIU Hong
(State Key Laboratory of Robotics and System (Harbin Institute of Technology),150080 Harbin,China)
Abstract:The fundamental principle and the structure of dielectric elastomer actuators,together with their applications in robotic systems were reviewed briefly,and the special stress was mainly laid on analyzing the progress in theoretical investigations on the properties of dielectric elastomer,including material characteristics,constitutive theory,failure mode and stability,etc.The actuator’s specific requirements and the technique characteristics of the flexible electrodes were also summarized in detail.The application of dielectric elastomer actuators in robotic system was prospected on the basis of a profound discussion of the challenges that the dielectric elastomer actuators still have now.
Keywords:robot; dielectric elastomer; driver; artificial muscles; flexible electrode
通信作者:刘宏,dlrhitlab@ aliyun.com.
作者简介:郭闯强(1982—),男,博士,助理研究员;刘宏(1966—),男,长江学者特聘教授.
基金项目:国家自然科学基金(51505098) ;中国博士后科学基金(2015M571403) ;中央高校基本科研业务费专项资金(HIT.NSRIF.2015059) ;机器人技术与系统国家重点实验室开放研究项目(SKLRS-2015-MS-04)
收稿日期:2015-08-05.
doi:10.11918/j.issn.0367-6234.2016.01.001
中图分类号:TP24
文献标志码:A
文章编号:0367-6234(2016) 01-0001-12
