一种应用于变频器测试的电力电子负载
2016-04-29马巍凌郝矿荣
马巍凌, 郝矿荣
(东华大学 信息科学与技术学院, 上海 201620)
一种应用于变频器测试的电力电子负载
马巍凌,郝矿荣
(东华大学 信息科学与技术学院, 上海 201620)
摘要提出一种应用于变频器测试的电力电子负载。测试平台由待测变频器和电动机模拟器构成,可以替代传统的交流传动试验平台进行变频器的性能测试和功率考核试验。电动机模拟器具有实际电动机端口的电气特性,能够灵活地模拟电动机在不同负载下的各种运行工况;测试变频器能够适应不同电动机参数、运行工况的变化。与传统的交流传动实验平台相比,该方案不含实际电动机,结构简单,电动机与机械负载均采用数字模型,易于修改,能灵活测试电动机参数和负载变化、异常运行时的变频器性能。仿真验证了该方案的可行性。
关键词电动机模拟器; 变频器; 电力电子负载; 测试
Power Electronic Load for Inverter Testing
MAWeiling,HAOKuangrong
(College of Information Sciences and Technology, Donghua University, Shanghai 201620, China)
AbstractIn this article, a power electronic load for inverter testing is proposed. The test platform is composed of the tested inverter and a motor simulator. The system can replace traditional testing platforms for AC drive inverter performance test and power test. Port attributes of the motor simulator are similar to that of actual motors. It can simulate analog motors under different load operating conditions. The tested inverter can adjust the motor parameters based on different operating conditions. Compared to the conventional AC motor driving test platform, this system is simple as modification of electrical and mechanical load model parameters is easy. Furthermore, it can closely monitor the inverter performance with changes of motor parameters and the load, and even with abnormal operation of the inverter. Simulation results show effectiveness and feasibility of the motor simulator.
Keywordsmotor simulator; inverter; power electronic load; test
变频技术的进步带来了交流电动机调速系统的蓬勃发展[1]。其中,变频器作为现代交流调速系统的“心脏”,不论是在电动机拖动系统中,还是在风机发电系统中,都对整个系统起着决定性影响。为检验变频器在各种电动机运行工况下的可靠性、安全性、灵活性、整机效率等技术指标,在研制过程和出厂考核时一般需要对其进行完整的性能测试实验。
传统的变频器测试多在交流传动平台上进行,通过控制同轴转动的发电机输出功率的大小来获取所需电动机转矩的负载特性,测试变频器在不同工况下的动、稳态性能。但是,该方法存在着硬件成本高昂、结构复杂、故障多、可靠性差、电能效利用率低等缺点,且系统中其他机械构件与电动机一旦定型,设备参数也就确定了,调节起来非常不便,不利于变频器开展各种试验。文献[2-4]中分别设计了应用于电动机驱动器测试的直流电动机、交流异步电动机、永磁同步电动机的传动实验平台;但这些测试平台都是以机械负载模拟为目标,结构参数复杂,调节不易。文献[5]中研究一种基于电力电子负载的动、模实验方法,但该方法仅限于模拟电阻、电容、电感等常规线性负载,不适用电动机这种高阶非线性、动态时变性负载。
为克服上述不足,本文将电力系统中常用的实时数字仿真技术(Real-Time Digital Simulation, RTDS)引入到传统的电力电子负载平台中[6],通过实时仿真电动机模型获得电流指令,控制功率变换器的开关器件生成实际的端口电流,以替代电动机应用于变频器系统的性能测试及功率考核试验,故称为电动机模拟器。利用功率变换器模拟电动机电气特性的方法最初由Atkinson等[7]提出;此后,文献[8-12]中对电动机模拟器进行了拓展性研究,并分别在数值积分方法、锁相环(Phase Locked Loop, PLL)技术、LCL滤波器和功率变换器控制等方面有所研究。本文还将研究应用于变频器测试的电动机模拟系统的工作原理和系统结构,以及系统中各子单元的基本实现技术。仿真分析表明了电动机模拟系统设计的有效性。
1电动机模拟系统的原理及结构
电动机作为一种机电能量转换装置,在运行过程中,既包含了转矩转速等机械量,也包含了电压电流等电气量;而变频器在测试过程中并不以机电能量转换为目标,而是关注电动机在不同工况下端口电压、电流的变化对变频器供电网络的影响。因此,电动机模拟系统的本质是利用功率变换器的开关器件模拟出与电动机运行时完全一致的端口电压、电流特性。由于变频器通常为电压源,故电压不能控制,只能模拟出电流。为此,系统应由3个部分组成: ① 电压采样单元,实时检测变频器的输出端口电压,并从中提取出有效分量;② 电动机模型实时仿真单元,可以根据输入电压的信息准确计算出要模拟的电流;③ 功率变换单元,由电流控制器根据给定的电流指令控制变换器的开关器件输出电动机的端口电流。电动机模拟器的基本结构如图1所示。
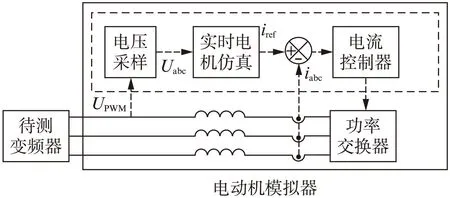
图1 电动机模拟器的基本结构Fig.1 Basic structure of the motor simulator
应用于变频器测试的电力电子负载结构如图 2(a) 所示,由图可见,系统由待测变频器、电动机模拟器两套变流装置和相应的控制系统组成。其中,系统的主电路包含供电电源、变频器、交直流母线、滤波电感、电容和双三相脉冲宽度调制(Pulse Width Modulation, PWN)整流器;双三相PWM整流器左侧与变频器输出端口相连,负责模拟电动机定子电流(即实际电动机端口电流),称为模拟侧变换器(Simulator Side Converter, SSC);双三相PWM整流器右侧与市电网络相连,负责将模拟变换器所吸收的有功电能回馈到电网,并维持直流母线电压稳定,称为并网侧变换器(Gird Side Converter, GSC)。
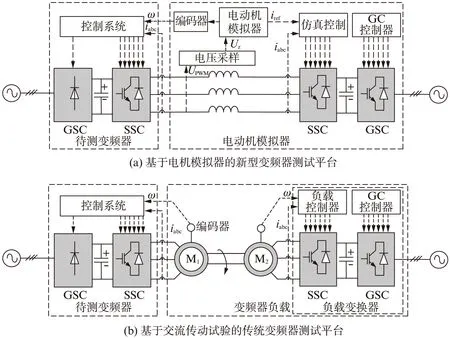
图2 基于电动机模拟器和传统交流传动试验的变频器测试平台Fig.2 Inverter test platform based on the motor simulator and traditional AC drive test
此外,控制系统中还应包含电压采样单元、实时电动机模型仿真器、模拟和并网侧电流控制器、保护单元、隔离驱动器等。与传统的基于交流传动试验的变频器测试平台[13-14](见图2(b))相比,系统少了2台同轴相连的电动机,有效降低了系统成本,且电动机本体参数和机械负载转矩均采用数字模型,易于自行设定和修改,方便测试变频器在电动机参数变化、不同运行工况时的适应性。对电动机模拟系统而言,要想真实、准确地模拟出实际电动机端口的电气特性,必须确保系统中各子单元的设计误差都在容许范围内,故需解决3个问题: ① 输入端口电压的准确无延时采样;② 实时电动机模型的积累误差抑制;③ 电流跟随器单元快速响应追踪电流指令,生成实际电流。
2单周采样单元
变频器输出电压为高频的PWM脉波,瞬时波形不连续,传统的瞬时值采样法无法直接从中提取变频器输出电压中的有效信息;而低通滤波电路会带来采样延时,影响动态响应速度或系统的不稳定,因此,需要一种无延时的采样方式来实时、准确地提取地PWM脉波中的有效分量。
单周采样单元是一种基于时域均值的采样方法。系统由带复位的积分器、离散采样器和复位信号触发器3部分构成,其结构和采样过程如图3、4所示。当单周采样与PWM脉波的起止时刻相同时,很容易知道采样电压等于PWM脉波在上一个周期内的调制量,此时,采样过程可视为PWM脉波调制过程的逆变换。根据冲量等效原则,虽然采样电压与原电压波形不同,但两者分别作用于惯性系统的效果是等同的。
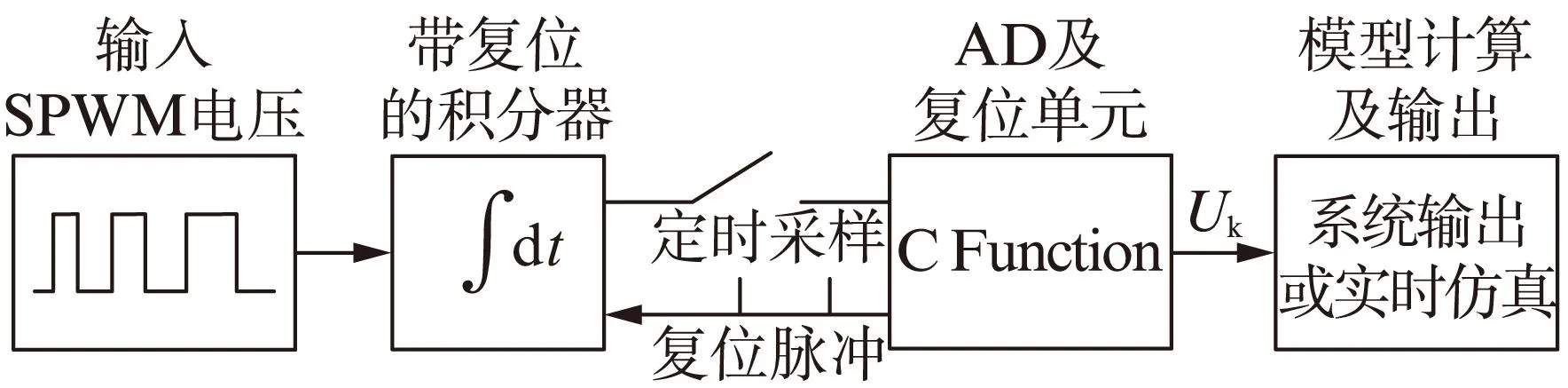
图3 单周采样单元的系统结构图
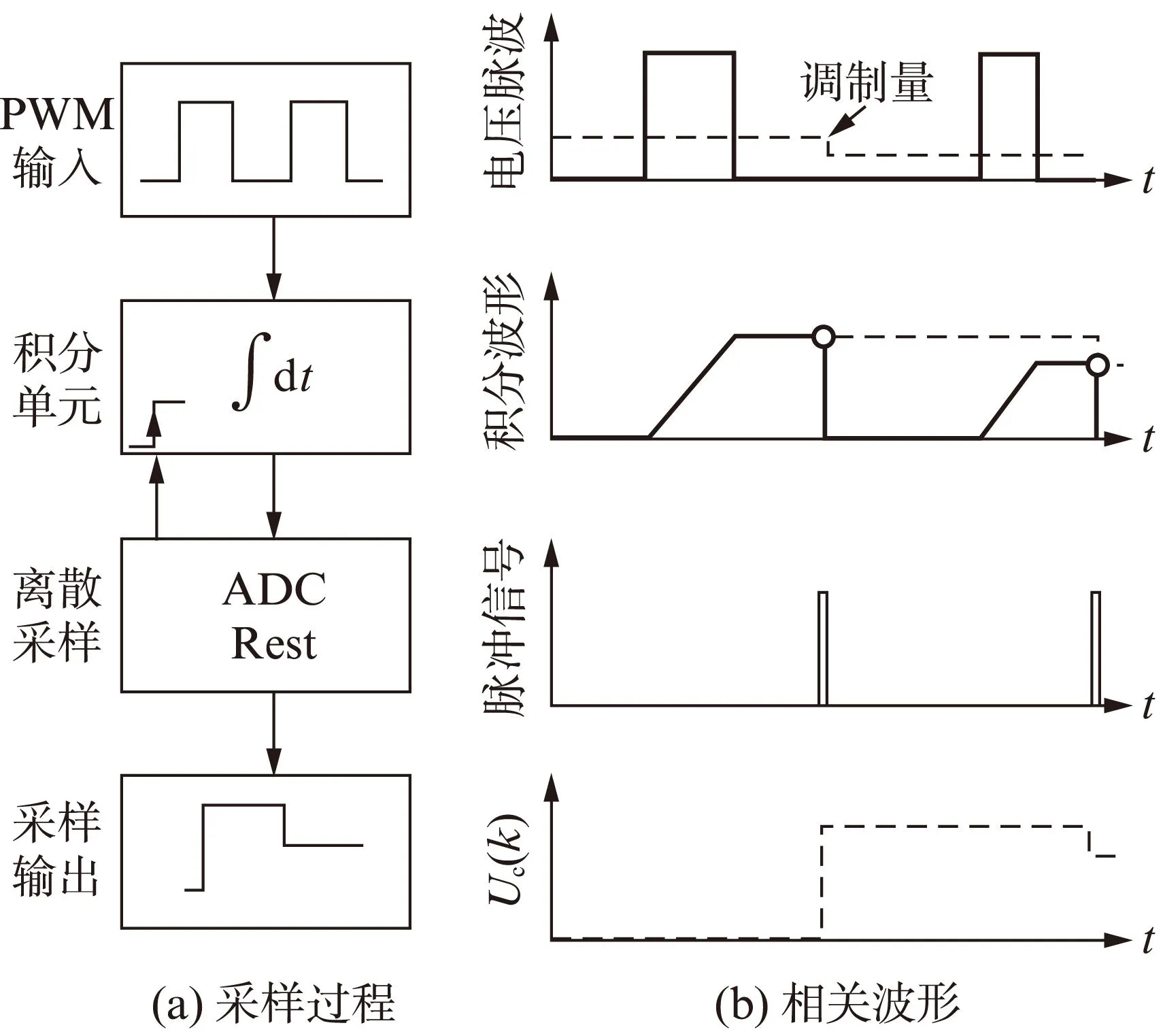
图4 单周采样单元的过程及相关波形
根据上述原理,假定在第k个时刻对系统进行采样,可得采样电压值
(1)
式中,Tc为采样周期;Us(t)为输入电压的瞬时值。
由于采样与PWM周期间可能相互独立,故式(1)中积分区间段存在着随机分布,采样电压值也是波动的,不妨设Tc=m·nTs,其中m、n为系数;Ts为PWM周期。当单周采样过程的起始点位于PWM脉波的不同时刻时,通过时域分析可得采样电压的最大、最小值:
(2)
式中,Udc为PWM脉波电压的峰值;D为占空比的开度。
根据式(2)可知,即使输入为恒占空比的PWM脉波,采样电压也不一定等于调制量,而是在一定范围内波动,波动范围与D相关,与Tc/Ts相关。当0 利用上述方法对变频器输出端口电压进行检测,选定变频器的开关频率fc=10KHz,采样频率fs分别为10、12kHz对其进行采样,可得采样电压波形如图5所示。其中,图5(a)为采样与PWM调制同步时的波形,此时采样系统能准确提取到PWM脉波中的调制量,波形稳定无偏差;图5(b)为采样与PWM调制不同步时的波形,此时采样值与调制波波形间存在较大的波形差异。 图5 不同采样频率对输入SPWM脉波电压的采样波形Fig.5 Sampling waveforms of SPWM input voltage with different sampling frequency 同步能保证采样无误差,但由于有积分环节存在,故单周采样单元具有延时性。根据均值采样系统定义,k时刻的采样电压值是前一周期内的平均值而非采样点的瞬时电压,即电压值有半个周期滞后。在利用该采样电压求解电动机模型时,应将其作为上一个而非下一个周期内的平均段电压,故相当于把此采样电压前推一个周期,超前半拍与滞后半拍两者相互抵消不产生任何延时,如图6中实线。当输入电压呈线形时,其等效于原输入;当输入电压在此时间内呈非线性变化时,均值采样系统必然无法及时响应。因此,采样周期与开关周期最好相同,此时采样准确无延时。 图6 均值采样的作用过程分析Fig.6 Analysis of the mean sampling process 单周采样单元同步采样时得到的电压值是abc坐标系下的瞬时值,是真实的物理量,在αβ和dq坐标系下,应用电动机的状态方程进行计算时,要将其矢量坐标变换得到相应的电压分量。 3电动机模型的实时仿真 电动机模型实时仿真的主要作用是准确计算待模拟电动机的实时状态量(如电流、转速),并将计算得到的电流指令(瞬时值)传送至功率变换单元。 3.1电动机模型 在交流传动系统中,三相鼠笼型异步电动机应用最为广泛,本文将其作模拟对象。三相静止abc坐标系下的电动机模型是一个高阶非线性、强耦合的多变量系统,实时控制和状态分析较为困难,需对其进行矢量坐标变换使其简化。在功率不变条件下,按照磁动势相等的原则,三相静止abc坐标系到两相静止αβ坐标系做如下转换: (3) 该变换也适用于电压和磁势的变换,它们的逆变换同样存在。 两相静止αβ坐标系与两相旋转dq坐标系做如下转换: (4) 其逆变换也存在。 用式(3)对三相定转子绕组进行矩阵变换,得到两相正交坐标系定子静止、转子以角速度ωr逆时针旋转的模型,但此时定转子绕组间仍存在相对运动,需用如图7所示的方法再次简化,得到两相静止αβ坐标系下的动态数学模型如下: 电压方程为 (5) 磁链方程为 (6) 转矩方程为 Te=npLm(isβirα-isαirβ) (7) 式中,Ls、Lr为定、转子电感;Lm为定、转子互感;Rs、Rr为定、转子电阻;ψsα、ψsβ、ψrα、ψrβ为定、转子磁链;isα、isβ、irα、irβ为定、转子电流;np为极对数。 图7 定子、转子坐标系变换到静止两相正交坐标系Fig.7 Transformation from the stator and rotor coordinate system to the two phase orthogonal stationary coordinate system 由式(5)~(7)可知,通过在两相静止αβ坐标系下对转子绕组旋转变换能够消除定、转子绕组间夹角对磁链、转矩的影响,将磁链方程矛盾转移至电压方程;简化后的电动机模型中参数仍是交变的实时变化量。两相旋转dq坐标系下的动态数学模型可通过式(5)~(7)变换等效,本文中不再详述,其磁链方程和转矩方程与式(6)、(7)相同,仅下标变化;但电压方程较式(5)增加一个输入量ω1(ω1为输入定子电压角速度),以提高系统控制自由度,但需对输入电压进行实时锁相。 (8) 由式(8)可见,在αβ坐标系下,电动机的状态方程是usα、usβ、TL3个瞬时量的函数,不需要对输入电压锁相。系统只需对端口电压进行实时采样和数字给定电动机负载转矩,就能准确计算得到待模拟电动机中各变量的实时状态。 3.2电动机模型的实时计算 为实时模拟电动机的端口特性,需要进行在线电动机仿真,利用数值积分方法求解电动机模型获得实时电流和转速值。这涉及数值计算方法和步长的选取,只有选择合适的计算方法和仿真步长才能提高电动机模型的计算精度,并减小运算量。常用的数值积分方法有Euler法、Adams法、梯形法等[15]。Adams法是一种多步长积分方法,相较于Euler法只需增加少量加法运算,具有精度高、计算量小等特点,特别适用于计算能力有限的控制器模型求解。本文采用二步Adams对式(8)的电动机模型进行实时求解,计算表达式为 (9) 式中,h为仿真步长;Fk为k时刻的微分量;xk为k时刻的状态量。 三相异步电动机的参数如表1所示。图8所示为采用二步Adams和Euler法求解得到三相异步电动机空载启动电流波形。由图8(b)可见,在100μs步长下,采用Euler法计算电流值严重偏离实际值,即便将步长减小至10μs,也仍与实际电流值间存在明显误差,为保证计算精度,需进一步减小计算步长,但这会给微处理器的实时计算带来较大运算压力;而图8(a)给出的二步Adams法求解电动机模型时的步长稳定性则较好,其在10~100μs步长下都具有足够高的计算精度,能准确地求解电动机实时状态量,是适合于常规控制器实时求解电动机模型的高效数值积分方法。 表1 三相异步电动机的参数表 图8 采用二步Adams法和Euler法仿真电机空载启动的电流波形 4功率变换器的电流跟踪控制 在实时求解电动机模型获得端口电流指令后,功率变换器需快速准确地跟踪此电流指令,生成实际电动机的端口电流,选用能量可双向流动、电流快速响应可控的三相电压型PWM整流器来构造模拟侧变换器(SSC)。在变频器的动态过程测试中,端口输出电压往往伴随频率和相位信息的突变,造成dq坐标系下的模型端口电压实时锁相困难,故本文选择在αβ坐标系下进行电流控制,控制方法采用经典的PI控制,其控制系统结构和参数参考文献[16]中进行设计,本文不再赘述。 并网侧变换器(GSC)的主要作用是将电动机所吸收的有功电能回馈到电网,并在SSC工作前帮助其建立正常工作时所需的直流电压,维持该电压在一适当范围;GSC的实质是建立待模拟电动机与供电网络间的缓冲,基本功能是维持电网电压和控制电网电流波形。考虑到GSC一端接入的是稳定的工频市电网络,能够被锁相;另一端是电动机传输的有功功率,当电动机动态变化时,有功电能也是动态波动的,故具有风力并网、太阳能并网等逆变器的特点,其控制策略和拓扑结构可参考该类并网逆变器进行设计,文中不再重复。 5电动机模拟系统的仿真及验证 为验证上述分析,本文在Matlab/Simulink中分别构建了变频器与电动机模拟器、变频器与三相异步电动机的仿真模型。表2给出了模拟电动机的参数。另模拟器中的控制系统程序采用 C_Function 编写,以实现对电动机模型实时仿真和功率变换器单元的控制。为验证电动机模拟的准确性,同时采用Simulink/PSB中自带的三相异步电机模块来构造实际电动机的仿真模型,作为比较判断的基准。 表2 模拟电动机的参数表 在电动机端口输入恒压恒频的PWM脉波电压,对电动机的空载启动、电压突变和机械负载突加的过程进行仿真实验: 电动机空载启动,200ms 时刻减小输入电压,300ms时刻突加机械负载。考虑到电动机模拟的本质是对实际电动机端口电气特性的模拟,故将电流、转速等实时状态量变换为真实物理量较为直观;另外,PWM脉波电压观测微小的占空比变化不易,文中给出了PWM脉波电压的调制波形,观测电动机的线电压uab、相电流ia和转速nr,仿真结果如图9所示。 图9 变频器动稳态性能测试时电动机模拟器的仿真波形Fig.9 Simulation waveforms of the motor simulator in testing the dynamic and steady-state performance of the inverter 由图9可见,电动机空载启动瞬间冲击电流很大,之后维持一个较小的电流稳态运行;在200ms 时刻,输入电压幅值突然减小,电动机电流跟随电压的变化,也未立即回归正常的正弦波形,而是经过一段过渡时间,到达新的电流稳态运行点;在300ms时刻,突加机械负载转矩1N·m,电动机的电流平滑响应增大,经过一段过渡时间,到达新的稳态电流运行点,并带载稳定运行;电动机的转速nr则随电流的动态变化而变化。由图可见,实际电动机与模拟电动机的仿真输出波形在时间刻度轴和变化趋势上几乎完全一致。 由此可见,电动机模拟器能够准确模拟实际电动机的端口电压电流特性,可以替代实际电动机用于变频器的性能测试和功率考核试验。仿真验证了电机模拟系统设计的可行性和有效性。 6结论 本文提出一种应用于变频器测试的电力电子负载,通过理论分析和仿真研究可得到如下结论: (1) 当采用单周采样单元对电动机模拟器输入端口电压进行同步采样时,采样系统能准确、无延时地提取PWM脉波电压中的有效基波分量。 (2) 在αβ坐标系下通过实时检测端口电压并数字设定转矩,采用二步Adams法能准确求解电动机模型的仿真实时状态量,与实际电动机的电流指令相比无稳态误差。 (3) 功率变换单元的电流控制器通过PI控制参数设计能实时准确跟踪电流指令,可快速稳定控制功率变换器生成实际电机所需的端口电流。 综上所述,本文提出利用实时数字仿真技术和功率变换器来模拟电动机生成实际的端口电流进行变频器的性能测试方案是可行有效的。相较于传统交流传动平台,少了2台同轴相连的电动机,有效降低了系统成本,且电动机本体参数和机械负载转矩均为纯数字量,方便人为设定和修改,可用于变频器的性能测试和功率考核试验,拥有较大的工程应用价值和市场推广空间。 参考文献 [1]何伟.交流变频调速技术及其发展[J].考试周刊,2011(45): 167-168. [2]郭鸿浩,周波,刘颍,等.基于负载转矩观测的风力机动静态特性模拟[J].中国电机工程学报,2013,33(27): 145-153. [3]乔明,林飞,孙湖,等.基于异步电机的风力机模拟试验平台的研究[J].电气传动,2009,39(1): 40-43. [4]CHEN Jie,CHEN Jiawei,CHEN Ran,et al.Static and dynamic behaviour simulation of wind turbine based on PMSM[J].Proceedings of the CSEE,2011,31(15): 40-46. [5]武恒宝.直流电子负载的设计与实现[D].保定: 河北大学,2014: 3-10. [6]李秋硕,张剑,肖湘宁,等.基于RTDS的机电-电磁暂态混合实时仿真及其在FACTS中的应用[J].电工技术学报,2012,27(3): 219-226. [7]ATKINSON D J, JACK A G, SLATER H J. Real-time emulation for power equipment development. I. Real-time simulation[J]. IEE Proceedings-Electric Power Applications, 1998,145(2): 92-97. [8]RAO Y S,CHANDORKAR MC.Real-time electrical load emulator using optimal feedback control technique[J].IEEE Transactions on Industrial Electronics,2010,57(4): 1217-1225. [9]RAO Y S,IYER S.DSP/FPGA implementation of a phase locked loop for digital power electronics[C]∥IEEE Region 8 International Conference on Computational Technologies in Electrical & Electronics Engineering.Listvyanka,Russia:IEEE,2010: 665-670. [10]RAO Y S,CHANDORKAR M.Electrical load emulator for unbalanced loaded and with power regeneration[C]∥IEEE International Symposium on Industrial Electronics.Hangzhou:IEEE,2012: 320-327. [11]STEURER M,EDRINGTON C S,SLODERBECK M,et al.A megawatt-scalePower hardware-in-the-loop simulation setup for motor drives[J].IEEE Transactions on Industry Electronics,2010,57(4): 1254-1260. [12]VODYAKHO O,STEURER M,EDRINGTON C S,et al.An induction machine emulator for high-power applications utilizing advanced simulation tools with graphical user interfaces[J].IEEE Transactions on Energy conversion,2012,27: 160-172. [13]周元钧.交流调速控制系统[M].北京: 机械工业出版社,2013: 212-239. [14]陈坚.交流电机数学模型及调速系统[M].北京: 国防工业出版社,1989: 83-96. [15]黄云清,舒适,陈艳萍,等.数值计算方法[M].北京: 科学出版社,2009: 224-252. [16]张兴,张崇巍.PWM整流器及其控制[M].北京: 机械工业出版社,2012: 90-91. 文献标识码A 中图分类号TM 343;TN 773.07 文章编号2095 - 0020(2016)01 -0023 - 09 作者简介:马巍凌(1981-),男,硕士生,主要研究方向为电力电子变换与控制技术,E-mail: mwot@163.com指导教师: 郝矿荣(1964-),女,教授,博士,主要研究方向为机器人视觉、机器人视觉伺服、模式识别及智能控制等,E-mail: krhao@dhu.edu.cn 收稿日期:2015 - 12 - 14