前桥摆转式四轮底盘转向系统的转向机理研究
2016-04-29李志伟
吕 莹,张 静,李志伟
(1.罗定职业技术学院,云浮 527200;2.华南农业大学,广州 510642)
前桥摆转式四轮底盘转向系统的转向机理研究
吕莹1,张静2,李志伟2
(1.罗定职业技术学院,云浮527200;2.华南农业大学,广州510642)
摘要:四轮底盘在小地块水田作业时,减少地头空行转弯时间是提高作业时间利用率的重要环节。为实现四轮底盘小半径转弯,以提高水田播插底盘作业率为主要研究目标,对四轮底盘在90°、180°等不同转弯形式下进行分析,得出适合小地块水稻播插作业时以较小转弯半径的转弯方式;前桥摆转四轮底盘在转向时,通过控制前桥驱动轮的转动,使前驱动桥主动围绕着转向装置转动,可以带动底盘以任意角度转向。采用ADAMS软件对四轮底盘后轮轨迹进行模拟,在确保后轮完全不吃入已完成作业区的倒U转弯方式的情况下,提出设计前桥摆转式四轮底盘转向系统的可行性。
关键词:四轮底盘,转向,前桥摆转式,小转弯半径
0 前言
由于水田对土地平整度要求比较高,田块面积增大时会增加平整的难度,故水田耕作地块面积一般都比较小,特别是山区丘陵因地形影响,田块大多小于0.133 hm2(2亩),还有很多0.067 hm2(1亩)以下的小田块。不规整的小块水田对田间作业机械机动性与操纵性要求较高,转弯半径大的水田机械不能满足要求,限制了水田机械的推广应用,使得大部分地区的水田机械化程度不高,特别是水稻播插机械化水平难以提高,严重影响着水稻生产机械化的发展。
1 我国水田机械的状况
1.1不同转弯方式对时间利用率影响
现今水田中所使用的拖拉机主要是引进于日本。这种底盘在进行播插作业时,主要采用偏转的方式进行转向[1-4],需要助力装置进行辅助转向。这种底盘需要3.5~4.0 m的地头宽度才能实现转向,作业时增加了空行时间,并且无法实现直接进入下一畦作业,影响了播插作业时间利用率,如表1。表1中主要以偏转转向底盘为例,不同转弯方式下的工作行程率与底盘的转弯半径有着密切的关系,转弯半径越大,工作行程率越小,而工作行程率越小,工作的时间利用率就越低,并且需要多次换挡操作,增大了转弯时的操纵难度。在我国南方小地块水田中使用的底盘,由于地块面积小而短,空行时间率一般都在30%以上,高者竟达50%~70%。在这种小地块中,底盘的尺寸愈大,工作速度愈高,其空行时间率也愈高。这不但要影响作业时间利用率,而且也会影响底盘及其机组的经济性和使用成本。故以实现播插底盘能够在地头转弯时直接进入下一畦为目标,减少空行时间,减小转弯半径是提高我国现阶段不规整、小地块水田作业机械适应性的关键技术难题。
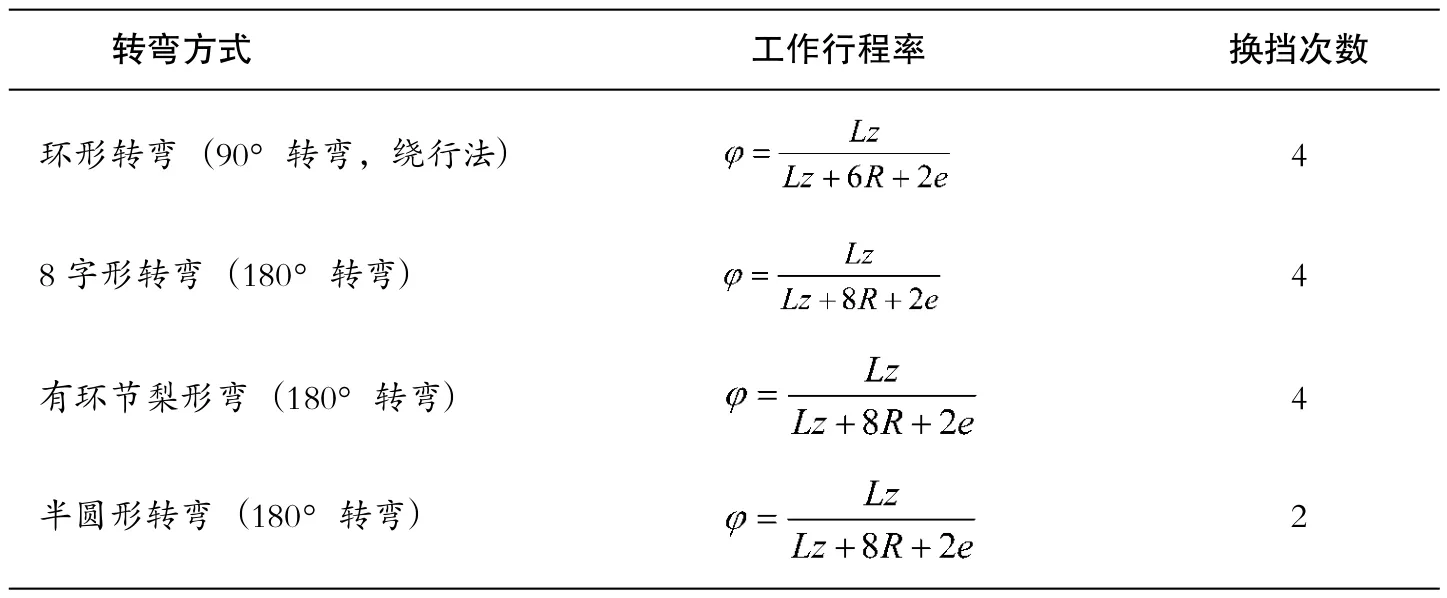
表1 不同转弯下的工作行程率Table 1 Operation working stroke rate under different turning
1.2我国水田机械研究现状
迄今为止,以日本插秧机为代表的插秧机构、以华南农业大学罗锡文院士团队研发的水稻直播机系列及农业部南京农业机械化研究所研发的毯状秧苗播种机系列等播插机具已可实现水稻播插机械化作业,但是仍缺少能够在小地块水田中进行水稻播插的同时具有轻型、打滑率低、不雍泥雍水、转弯半径小等特点的水田农机底盘。日本所使用的插秧机底盘采用中高花纹轮胎和汽油机作为动力,虽然解决了底盘要具有轻型、打滑率底、不雍泥雍水等问题,但采用的前轮偏转转向方式仍无法解决在水田中实现转弯半径小的问题。因此,根据我国水田的特点,需研究适用于小地块水田,具有较小转弯半径,在较小的地头宽度能进行180°转弯模式的四轮底盘,应用于挂接水稻播插机具作业,同时,底盘还要达到轻型、离地间隙大、转向灵活(可在地头宽度小的地方自由转向)、方便进出入田地或过田埂的要求。
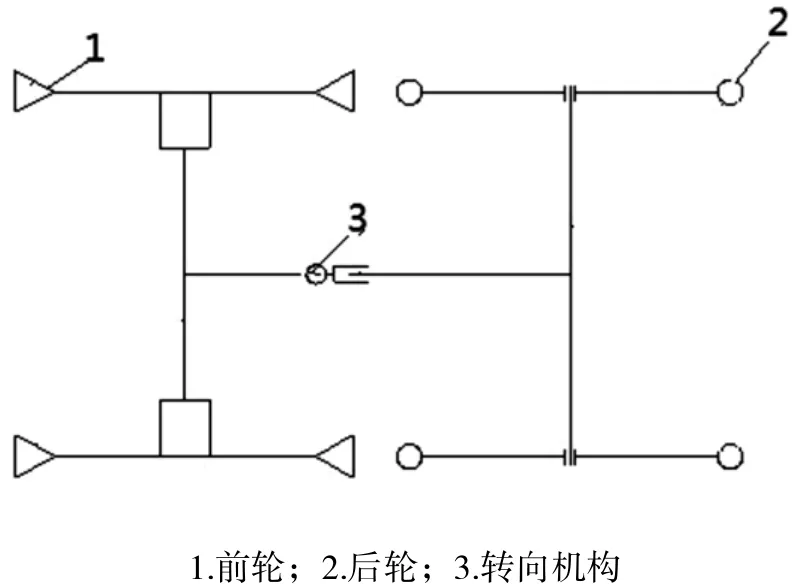
图1 底盘结构原理简图Fig.1 The structure principle diagram of chassis
2 前桥摆转转向式四轮底盘转向机理分析
2.1前桥摆转四轮底盘的转向机理分析
通过对现有所用的四轮偏转转向底盘、前后轮同时偏转以及折腰式偏转的四轮行走底盘的转弯半径的分析,可得出转弯半径对底盘工作效率有着重要的影响。因此,为了满足底盘在小地块旱地和水田中实现底盘转向不进入已完成作业区,并具有转弯半径小、转弯操作简单的高效率转向机构等功能。要研究一种高效率转向的四轮行走底盘,就一定要解决转弯半径的问题,即尽量减少转弯半径。最理想的转弯半径是底盘宽度的一半,即转动方向一边的轮子的转速应该是零。这样底盘车架转弯的时候其前桥的外侧轮就会围绕内侧轮转动,而内侧轮是原地转动,可实现在原地的连续转弯180°如图2所示的倒U型转向,而不需要倒退等的辅助转弯。因此,需研究一种转向系统,使底盘车架在转弯的时候车架能够和前桥中心进行相对转动,其转向结构原理如图1所示。这种新型的转向系统——前桥摆转转向式转向系统,在转向时,一个前轮停止行走,另一个前轮继续行走带动前桥绕停转的前轮转动,同时通过前桥中部与车架的连接铰链带动车架转向。这种底盘的车架要确保前桥的中心可作任意角度的转动,同时还具有横向浮动功能,这就能确保底盘的四个轮子均能同时着地,实现四轮底盘在小地块中能以小的转弯半径、在小的地头宽度能进行轻便和灵活地转向。当该系统底盘在水田作业时,由于行走轮陷入土壤中一定深度,此底盘在水田转向时免除了前轮偏转转向方式存在的转向力的问题,只需控制前桥摆转转向底盘一侧轮的停转,另一侧轮的绕转,就能轻易的实现小转弯半径的转向,并且后桥在转向时可以保证不进入已完成作业区等要求。
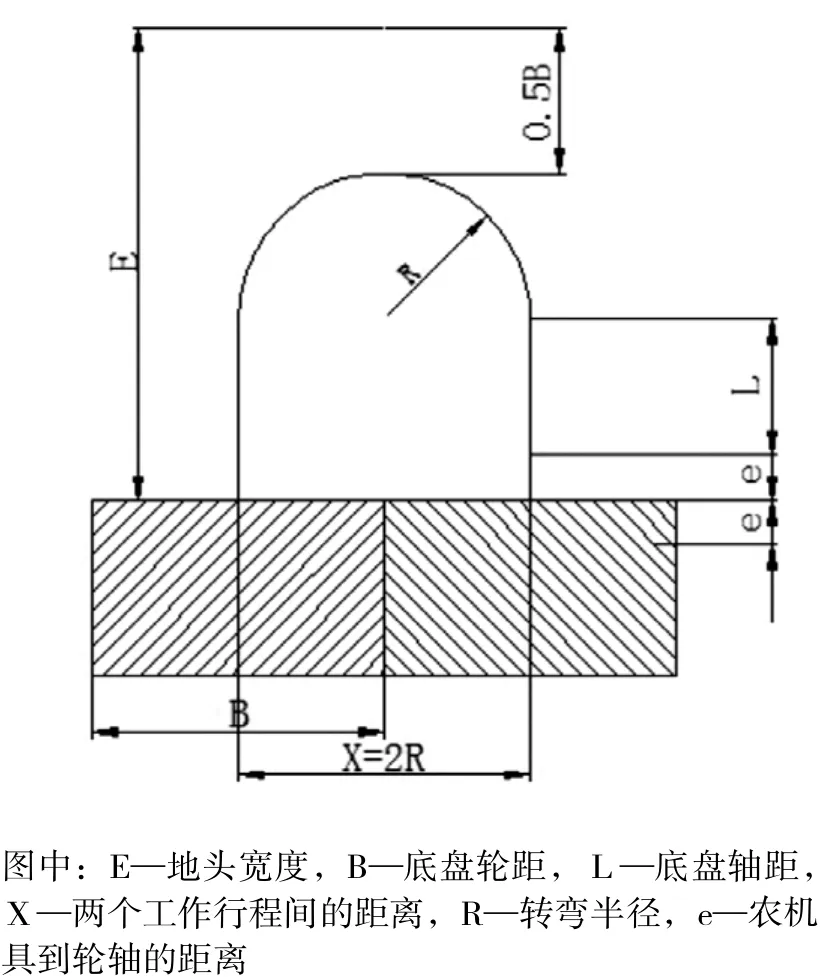
图2 倒U型转弯模式Fig.2 Inverted U curve model
图3 90°转弯时各轮胎轨迹模型Fig.3 The tire trace model under 90°turning
2.2前桥摆转四轮底盘行走轮轨迹模拟
为了更好验证前桥摆转转向四轮底盘在转弯过程中能否实现小转弯半径的目标,通过软件ADAMS对底盘进行模拟仿真。ADAMS/View[13-18]具有较为强大的实体建模功能,能够对零件质量、质心、惯性矩等进行自动计算,并能加入材料、色泽等特征信息。对于外形不是很复杂的零件,用ADAMS/View建模较为方便。
在ADAMS中建立前桥和后桥以及铰接点等,铰接点的位置设置在前桥的中点处,具体尺寸是:轮距为1 440 mm,轴距为900 mm,前轮半径350 mm,后轮半径250 mm。考虑到重心前置的要求,模型中球的位置代表底盘车身的重心,球心位于距地面高度650 mm、距前桥300 mm的对称平面上,车身质量为350 kg。分别建立底盘在90°、180°转向时后轮轨迹,如图3和图4;通过ADAMS软件模拟可得出前桥摆转四轮底盘在转向时转弯半径小,所需要的地头宽度比较小,满足设计要求,适合小地块水田的播插作业。
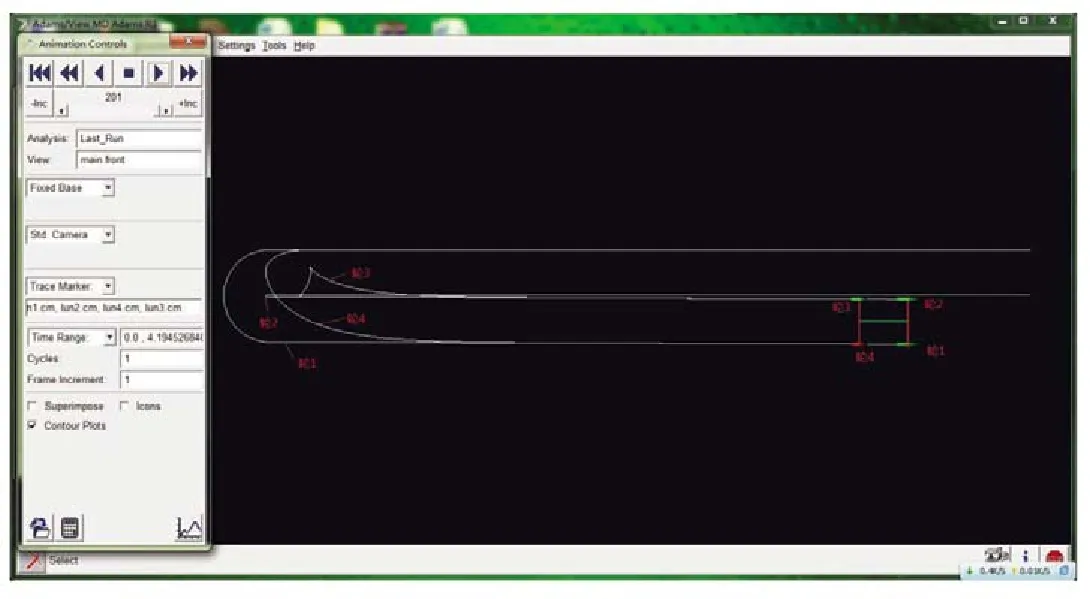
图4 180°转弯时各轮胎轨迹模型Fig.4 The tire trace model under 180°turning
3 小结
前桥摆转式转向系统通过采用前桥中部通过垂直转轴与纵向水平转轴相结合的铰接结构设计方案,可确保前桥绕垂直转轴作任意角度的转动,同时前桥在水平方向作一定角度的浮动,确保四轮能够同时着地;通过ADAMS简化模型,验证了前桥摆转式转向方案满足设计要求,为物理样机能够满足直接作倒U形连续转弯掉头进入下一畦的要求提供了重要的理论依据。
参考文献
[1]聂海强,张佰阳,李正仁.国内水田机械研究现状[J].现代化农业,2011(1):7-9.
[2]陈济勤.农业机器运用管理学(第二版)[M].北京:中国农业出版社,1995:15-35.
[3]陈香香.水旱轮作区现代化田间工程模式研究[D].扬州:扬州大学,2005.
[4]丁颜真.机械化田间作业行走方法的探讨[J].农机使用与维修,2012(4):148.
[5]周志立.拖拉机机组牵引动力学[M].北京:科学出版社,2010.
[6]张扬.铰接撞在机转向系统动力学分析与研究[D].长春:吉林大学,2006
[7]李阳.铰接式履带车辆行驶性能研究[D].长春:吉林大学,2011.
[8]曾爱平,邱秀丽,赵娜,等.液压后驱式轻型农机水田自走底盘的设计[J].农机化研究,2010 (7):149-151,159.
[9] Wang guo-ye,liu zhao-du,ma yue-feng,et al.Reasearch on bi-speed front Axle of four-wheel drive tractor[J].Agricultural Engineering International, 2011, 13(3):56-58.
[10] S.Kim, K.Park, H.J.Song, Y.K.HWang, S.J.Moon, H.S.Ahn and M.Tomizuka.Development of control logic for hydraulic active roll control system[J].International Journal of Automotive Technology, 2012, (13):87-95.
[11]吕莹,吴潇,符耀明,等.四轮底盘转向方式对工作行程率影响的研究[J].农机化研究,2005(5):71-74.
[12]张广庆,朱思洪,李伟华,等.铰接摆杆式大功率拖拉机原地转向仿真与实验[J].农业机械学报,2012(2):10.
[13]赵武文.ADAMS基础与应用实例教程[M].北京:清华大学出版社,2012.
[14]史耀强,厉明勇,顿向明,等.双足机器人基于ADAMS与Matlab的联合仿真[J].机械与电子,2008(1):45-47.
[15]李增刚.ADAMS入门详解与实例[M].北京:国防工业出版社,2006.
[16]赵武文.ADAMS基础与应用实例教程[M].北京:清华大学出版社,2012.
[17]田会方,林喜镇,赵恒.基于Pro/E和ADAMS齿轮啮合的动力学仿真[J].机械传动,2006,30(6):66-69.
[18]吕莹,吴潇,符耀明,等.前桥摆转转向式四驱底盘结构形状指数的优化[J].农机化研究,2015(6):33-36.
Research on the Steering Theory of Front Axle Swing Sowing Four-wheel Chassis
Lv Ying1, Zhang Jing2, Li Zhiwei2
(1.Luoding Polytechnic,Yunfu 527200, China 2.College of Engineering, South China Agricultural University, Guangzhou 510642, China;)
Abstract:Four-wheel chassis when working in a small piece of paddy field, reduce blank line turning time is an important link in work utilization rate operation time.In this paper, in order to realize four-wheel chassis small turning radius, increase the paddy field on chassis operation efficiency as the main research target, 90°, 180°in the four-wheel chassis under different forms of turning modeling analysis, and concluded that suitable turning way of smaller turning radius for small plot rice sowing operations ; When the front axle Swing four-wheel chassis steering, By controlling the rotation of the front drive axle, to the front drive axle can rotate active around the steering device, and drive the chassis steering in an arbitrary Angle; Through ADAMS software for simulating four-wheel chassis rear wheel track, and ensuring the rear wheels do not enter that the assignments section has been completed, put forward to design front axle pendulum type four-wheel chassis steering system operability.
Key words:four-wheel chassis; Steering; Front axle swing type; Small turning radius;
作者简介:吕莹(1982—),女,满族,辽宁本溪市,讲师,博士,罗定职业技术学院教师,研究方向为农业机械装备及设施。广东省罗定市西门岗5号,527200。Email: 26026174@qq.com