GMR-1卫星通信系统的下行同步研究*
2016-04-28段红光张满军商震钱继坤
[段红光 张满军 商震 钱继坤]
GMR-1卫星通信系统的下行同步研究*
[段红光 张满军 商震 钱继坤]
摘要
在GMR-1卫星移动通信系统中,同步系统占有举足轻重的地位。在2012年最新版本中的GMR-1 3G标准中加入了LDPC编码技术和16APSK及32APSK调制技术,这些技术的引进,降低了系统对性噪比的要求,但是对同步系统提出了巨大的挑战。低信噪比要求同步系统需要有更优的算法。因此文章提出了基于chirp信号傅里叶变换不变性的初始捕获技术和基于DFT的同步跟踪环技术,进一步提高同步精度。
关键词:信号与信息处理 初始捕获 同步跟踪 dual-chirp信号
段红光
男,硕士,正高级工程师,重庆邮电大学通信与信息工程学院,主要研究方向:GMR-1卫星通信系统协议栈开发,TD-LTE协议栈开发。
张满军
商震
男,硕士,重庆邮电大学通信与信息工程学院,学生,主要研究方向:GMR-1卫星通信系统协议栈开发。
钱继坤
男,南京邮电大学地理与生物信息学院,学士,学生,主要研究方向:GPS卫星定位系统。
专项名称:LTE-Advanced MIMO矢量分析仪 编号:2015ZX03001010-003
专项名称:TD-LTE-Advanced大容量MIMO技术应用与验证 编号2015ZX03001033-00
引言
在GMR-1卫星移动通信系统中,利用的是下行信道FCCH或FCCH3实现同步功能的[1]。FCCH和FCCH3信道是用chirp信号调制的[2]。在现有的文献中,都只对GMR-1 3G卫星移动通信系统的初始捕获算法做了大量的研究,对于同步跟踪算法,没有做过多的研究。对于最新演进的GMR-1 3G协议加入了很多新技术(LDPC编码,16APSK和32APSK[2]等),原有的同步技术显得精度不够。本文提出将Chirp信号的同步过程分为chirp信号初始捕获过程(粗同步)和chirp信号同步跟踪(细同步)过程。Chirp信号的初始捕获主要是调整本地chirp信号的时间和频率,使得本地的chirp信号和接收到的chirp信号的定时误差和频率误差减小;chirp信号同步跟踪功能则是自动调整本地chirp信号的定时,进一步缩小定时误差。典型的chirp信号同步策略就是利用chirp信号的脉冲压缩性质,接收信号通过下变频再通过低通滤波器后,与本地的chirp信号进行相关运算或者通过一个匹配滤波器。移动终端的捕获器件调整时钟源。一旦捕获到信号有用信号,立即启动跟踪器件,进一步调整时钟源,使得本地chirp信号发生器与接收的chirp信号保持精确同步。
1 初始捕获
目前常用的初始捕获算法是根据参考文献[3]和文献[4]提出的算法及其改进算法。在2012年最新版本中的GMR-1 3G标准中加入了LDPC编码技术和16APSK及32APSK调制技术,这些技术的引进,降低了系统对性噪比的要求,但是对同步系统提出了巨大的挑战。低信噪比要求同步系统需要有更优的算法。基于此,本文在这里提出了基于chirp信号傅里叶变换不变性和同步跟踪环技术,进一步提高同步精度。
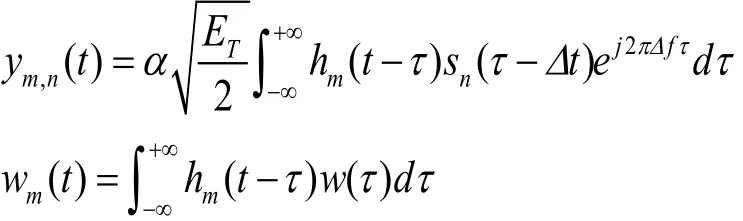
假设发射机发送的信号为:

在单径条件下的接收信号为:

1.1时间延时估计
接收机的上下两路的匹配滤波器的脉冲响应分别为:

接收信号r( t )经过匹配滤波器后,输出信号为:

其中:

这是一个近似的sinc()函数,其峰值对应的时间可以表示为:

所以得到时间延时估计为:

1.2频率偏移估计
根据chirp信号的傅里叶变换不变性可知:chirp信号经过傅里叶变换后的频域信号也是一个chirp信号[5]。因此和时域一样,频域也可以使用匹配滤波器,只不过此时的滤波器是频域匹配滤波器。所以可以利用下面的方法实现频率偏移估计。



这也可以看作一个近似的sinc()函数,其峰值对应的频率可以表示为:

所以得到频率偏移估计为:

具体的实施方案如图1。
2 同步跟踪
经过初始捕获后,本地的chirp信号发生器经过校正,在频率和时间上基本达到同步要求,但是仍然存在部分误差。由于chirp信号具有很强的抗频偏性能,加之经过初始捕获过程的校正,频率偏移基本消除。但是时间偏移仍然存在,这就需要同步跟踪过程进一步消除。
2.1同步跟踪算法
如图2所示,假设在t =0的信号是本地chirp信号(图2中实线所示)。另一个信号(虚线所示)是经过初始捕获算法校正后的chirp信号,与本地chirp信号存在t1∆或t2∆的时间误差,而这时延误差导致了f1∆或f2∆的频率偏移。可以利用相关算法和DFT算法检测误差,算法原理如图3所示。

图2 非同步的两个chirp信号
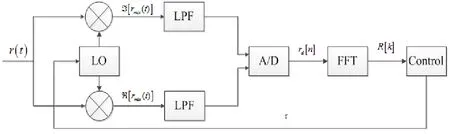
图3 同步跟踪模型框图
设经过初始捕获算法校正过的接收信号为:

本地chirp信号为:

图1 初始捕获系统

经过低通滤波器后:

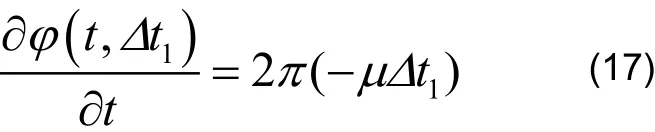
信号的相位表达式为:

相应的频率表达式为:

2.2同步跟踪实现
2.1节提出的算法可以通过DFT算法实现,具体过程如下推导:
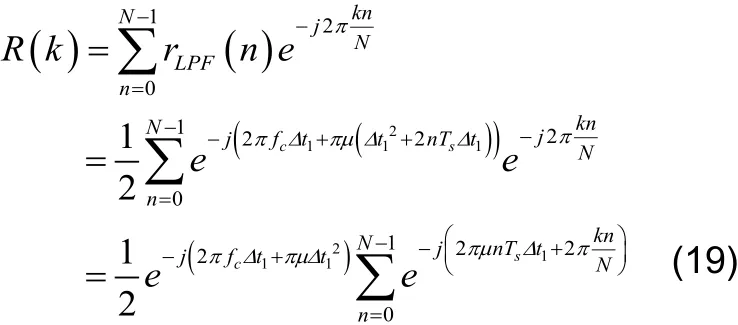
其中Ts为采样周期,表示采样频率。然后检测信号幅度谱的最大值:

公式20取得最大值的条件是:

即时间延时估计为:

3 性能仿真
本次仿真中的数据为:带宽B=32 kHz(GMR-1 3G协议信道最小带宽采用的是31.24KHz),突发持续时间为T=0.5 ms,采样率分别取2倍的带宽。采用蒙特卡罗仿真,取实验数据为5 000个。
3.1初始捕获性能分析
初始捕获的捕获性能如图4,在性噪比为-5dB时,捕获率达到75%左右。正常情况下,移动终端的信噪比为5dB,捕获率接近100%。

图4 突发捕获概率
3.2同步跟踪性能分析
同步跟踪性能仿真曲线如图5,与理论曲线相差4dB左右,如果采用高效的纠错码技术可以进一步降低误码率。
4 小结
本文利用了chirp信号的傅里叶变换不变性(时频对称性)实现初始捕获。此外,为了进一步提高估计精度,又提出了基于DFT的同步跟踪算法,经仿真完全符合GMR-1 3G卫星移动通信系统的要求。

图5 同步跟踪系统误码性能
参考文献
1ETSI TS 101 376-5-7.GEO-Mobile radio interface specifications(Release 3); third generation satellite packet radio service;Part 5:radio interface physical layer specifications;Sub-part 7:Radio Subsystem Synchronization;GMR-1 3G 45.010.2012.12
2ETSI TS 101 376-5-4.GEO-mobile radio interface specifications(Release 3); third generation satellite packet radio service; Part 5:radio interface physical layer specifications;Sub-part 4:Modulation; GMR-1 3G 45.004.2012,12
3Vishwanath.T.G.,Parr.M.,Shi.Z.L.,Erlich,S..Acquisitionmechanism for a mobile satellite system.United States Patent US7245930 B1,2007-01-17
4Vishwanath T.G.,Parr M.,Shi Z.L.,Erlich S..Synchronization inmobile satellite systems using dual-chirp waveform.United States Patent US 6418158 B1,2002-07-09
5Boumard .S.,Mammela.A.Time domain synchronization usingNewman chirp training sequences in AWGN channels.Proc.2005IEEE Int.Conf.Communication(ICC2005),Seoul,Korea,16 –20May 2005.2:1147 –1151
收稿日期:(2015-12-24)
通信作者,男,硕士,重庆邮电大学通信与信息工程学院,学生,主要研究方向:GMR-1卫星通信系统协议栈开发。
DOI:10.3969/j.issn.1006-6403.2016.03.012