基于AVR的湖泊水质远程监测系统设计
2016-04-27申海洋巢湖学院机械与电子工程学院安徽合肥238000
申海洋 (巢湖学院机械与电子工程学院,安徽 合肥 238000)
李林 (北京航空航天大学电子信息工程学院,北京 100000)
基于AVR的湖泊水质远程监测系统设计
申海洋(巢湖学院机械与电子工程学院,安徽 合肥 238000)
李林(北京航空航天大学电子信息工程学院,北京 100000)
[摘要]为准确有效地对湖库水华现象进行监测和预测,在分析湖泊水质特征的基础上,研究提出了一种基于AVR的水质远程监测系统。系统由下位机数据采集终端和上位机管理平台2部分构成:下位机对湖泊水质的各参数进行实时采集,再通过GPRS网络传输至上位机;上位机对水质数据进行管理,进行存储、显示和预测,并生成叶绿素变化趋势图。该系统具有性能高与低功耗等特点,同时实时性高、误差低,可以满足监测的需求。该系统的研究设计有助于掌握水质近况,为制定治理方案提供了一定的依据。
[关键词]AVR;远程水质采集终端;水质监测管理平台;GPRS
随着人口的增加和工农业的快速发展,我国内陆湖泊水资源受到来自生活水污染、农业生产污染和工业生产污染的多重压力,部分地区湖库水质日趋恶化,湖泊蓝藻现象屡见报端。研究表明,在影响湖泊水质的众多因素中,以水富养化现象尤为严重,严重超标的N、P含量导致浮游植物滋生,进而导致蓝藻现象。因此,如何快速有效地对其水质进行监测和预测,为水环境治理的决策者提供依据,成为当前亟需解决的问题。
国外研究者从20世纪70年代开始着手开展对水质监测系统的研究,并取得了一定的成果。而我国对水质监测系统的研究起步晚,技术水平较为落后。当前对水质的监测仍普遍使用人工的方式对数据进行采集和分析。这样人工的方法需要投入大量的人力物力,耗费较长的测试周期。此外,对水质参数地测试较为单一,且不能实时传输数据[1]。总体而言,我国当前水质监测工作自动化程度低,无法满足当前监测和预测水华的需要[2]。基于当前我国多数湖泊水质成分的分布特点和水质监测的需要,笔者设计了一种基于AVR的远程水质监测系统。

图1 系统总体结构图
为实现对湖库水质参数的监测和水华预警功能,系统由远程水质采集终端和水质监测管理平台2个部分组成,其总体结构如图1所示。
1.1远程水质采集终端
远程水质采集终端由水质参数采集模块、AVR单片机、GPS定位系统、GPRS无线传输模块组成,实现对水质参数的采集和无线传输功能。首先通过YSI6600多参数水质监测仪采集水中的总含盐量(tds)、盐度(PPt)、溶解氧(DO)、溶解氧饱和度(DOSAT)、酸碱度(PH)、氧化还原电位(orp)、叶绿素(chl)、电导率(spcond)、水温(temp)等9种水质参数,采集到的参数及GPS地理位置信息通过AVR单片机预处理后经由GPRS无线网络传输至水质监测管理中心。
1.2水质监测管理平台
水质监测管理平台硬件部分由计算机、数据库服务器两部分构成。系统软件部分在win2000操作系统平台下搭建,使用MFC编程实现。接收到由水质采集终端传送来的水质参数后,系统自动对水质参数数据进行存储、分析水质参数并输出叶绿素变化趋势图。再通过对历史水质参数的处理分析,使用灰色神经网络算法对水华的未来发生的概率进行预测、预警。
2系统硬件设计
系统总体硬件结构如图2所示。硬件部分主要由水质参数采集单元、控制单元、GPRS无线远程传输单元、数据处理服务器、数据库服务器几部分构成。水质参数采集单元、控制单元及数据传输单元3个部分组成了水质采集终端,各单元之间通过串口进行通信:YSI通过串口1与AVR通信; AVR同GPRS无线模块和GPS之间通过串口0进行数据通信。数据处理服务器和数据库服务器两部分构成水质监测管理平台。数据处理服务器对接收到的水质参数进行处理,并将数据存储在数据库服务器中。
本次采样地点露头新鲜,剖面岩石发育良好,按照不同岩性变化采取等间距采集样品,在地层分界处(图2a)则加密采样,共采集硅质岩、泥质硅质岩、硅质泥岩样品15件,其中采集上泥盆统6件,下石炭统9件,样品产出地质剖面图见图3。
2.1水质参数采集单元
为实现水质监测系统的水华预测、预警功能,需要建立水华预测模型。水华预测模型的建立依据在各个时刻同时采集的9种水质参数进行建模。为满足水质参数获取的准确性和实时性要求,系统选用YSI6600水质检测仪来采集水质参数。YSI6600是一款多参数水质检测仪,它可同时监测多达17个参数,且具有电池寿命长、体积小、功能强等优点,适用于不同水体的多点采样、定点式数据采集、长期连续在线监测和剖面分析[3]。由于YSI6600只能进行单工通信,即只能发送数据,一旦YSI接收到数据就会发生重启,因此YSI6600通过RS232与AVR串口1连接时,将YSI6600的发送端TXD端口连接RS232的接收端RXD端口;YSI的接收端RXD不得与RS232的发送端TXD相连接。
2.2控制单元
水质采集终端中使用AVR的ATMEGA128的单片机作为控制器,ATMEGA128是ATMEL公司的8位系列单片机的最高配置的一款单片机,其内部集成了高性能、低功耗的AVR8位微处理器、先进的RISC结构和非易失性的程序和数据存储器等特性。AVR单片机使用C语言进行编程,实现了对水质参数的采集、处理、传输等功能。
2.3GPRS无线远程传输单元
将获取到的水质参数通过GPRS无线远程进行传输,解决了传统RS232信号传输距离短、抗干扰能力差、费用高的缺点,有效提高了数据通信的可靠性、安全性和保密性[4]。系统采用SIM300模块实现水质采集终端与水质监测管理平台之间的无线远程通信。SIM300是一个三频GSM/GPRS模块,工作频率EGSM 900MHz,DCS 1800MHz和PCS 1900MHz。 其内部集成有射频天线、TCP/IP协议、GSM控制器等。由于SIM300内部集成了TCP/IP指令,可以使用AT指令控制数据的传输。其传输距离远,精度高,速度快,且可以适应恶劣的环境,可以满足系统的设计要求。
此外,为了获取监测点的地理信息参数,在水质采集终端中加入了GPS芯片,GPS位置信息经由AVR处理后经由GPRS网络传输[5]。
2.4数据处理服务器
为提高系统处理数据的运算速度和保证系统的稳定性,采用IBM企业级服务器IBM System X 3100M4作为数据处理服务器,系统软件平台在WIN2000平台下运行。
2.5数据库服务器
为保证水质参数数据的安全性和方便数据的维护,系统使用了独立的数据库服务器对数据进行存储和管理,使用SQL2008数据库软件来对数据进行管理。
3系统软件设计
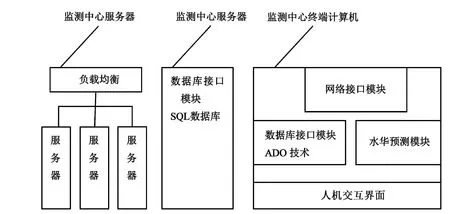
图3 软件模块关系图
系统软件包括了水质采集终端下位机和监测管理平台上位机2部分,其总体模块关系如图3所示。水质采集终端软件实现水质参数的采集与处理和远程数据传输2个功能;监测管理平台软件实现对水质数据的基础管理,包括显示、存储等功能,此外还实现对水华预测、预警。
3.1下位机软件设计
1) 水质参数采集与处理。水质监测终端不仅要采集水质参数,还要对水华的数据和GPS位置信息进行增加校验位的预处理,以提高检测管理平台的运行速度。
通过串口把YSI 与服务器连接起来,用串口调试助手接收YSI发送来的数据,通过串口调试助手上的数据可以发现YSI发送的数据之间用空格隔开,一组数据结束后回车换行。虽然一组数据之间空格隔开,但是空格的个数不全一样,所以要对数据之间的空格进行处理,用一个逗号来代替2数据之间的所有空格,这样,每组数据中2数据之间就具有相同数目的间隔标志,这为下一步数据处理奠定了基础。
在通过GPRS无线传输水质数据和GPS地理信息前,需在数据中增加校验位,使得水质监测管理平台运算的准确性得以保障。程序设计采用“和校验”的算法,将各组数据内的数据全部加起来,将取和操作的后8位加入到传输的各组末端,再一并传输至监测管理平台,通过检验接收的数组验证数据相加的最后8位的和是否相等,若相等,则数据正确,否则数据错误,舍弃。和校验对该水华预警系统的准确性也提供了重要保证。
2) 数据传输。系统选用TCP/IP协议作为水质监测系统的数据传输协议。数据包以独立包的形式进行透明传输,TCP/IP协议提供了面向对像的连接和可靠的数据传输服务。数据无差错、无重复的发送,且按顺序接收[6],保证了数据传输的准确性,为准确的预测水华奠定了基础。GPRS模块中集成了TCP/IP协议,通过AT指令来控制GPRS模块以实现无线远程传输,配合上位机通信程序与监测终端实现通信[7]。
上位机与下位机的通信是水质监测的重要环节,对水华预警的准确性有至关重要的影响。由于TCP/IP协议的无差错性,因此上位机编程时选用基于面向连接的socket编程实现与监测终端的通信。对下位机发送来的数据包,去除其人为加入的包头包尾,把数据显示在上位机的接收模块上。
3.2上位机软件设计
监测中心上位机软件主要由数据接收单元、数据存储单元、数据处理单元3大模块组成。
1)数据接收单元软件功能设计。上位机与下位机的数据通信是水质监测的基础,直接影响了水华预警的准确性。鉴于TCP协议的无差错性,因此在上位机编程时同样采用基于面向连接的socket编程实现与客户端的监测终端的通信的。
对下位机传送的数据包,去除先前人为加入的包头和包尾,把数据显示在上位机的接收模块上。
2)数据存储单元软件功能设计。系统采用SQL Server 2008对水质数据进行管理,以便快速、有效地对水质参数数据进行存储、访问。
3)水质数据处理单元软件功能设计。接收到水质参数后,系统对数据进行统计分析,并绘制出叶绿素变化趋势图,便于用户直观地观察叶绿素水平的变化。
系统最后要对水华发生的可能性进行预测,因此该预测模块软件系统的设计是整个系统核心部分之一,预测算法采用了灰色神经网络系统[8,9]算法,对前期历史数据就行统计分析,绘制水华的发展趋势图。监测与预测单元如图4所示,在该模块上可以监测到下位机发送来的水质参数,并通过这些水质参数对水华进行预测,最终管理平台生成水华预测趋势图,如图5所示。

图4 监测单元

图5 水华预测
4结语
针对传统湖库水质监测的缺陷,研究设计了基于AVR的远程水质监测系统,该系统实现了数据的远程采集和传输,有效提高了水质参数传输的准确性和实时性。管理中心设立使得水质参数的管理、监测更加便捷、有效,提高了水华预测的实效性。在软件系统中增加了生成叶绿素曲线图功能,便于直观观察叶绿素变化。该系统具有一定实用价值,具有良好的应用前景。在后期的研究中,将结合光伏技术、远程遥控技术和GPS定位技术[10],将水质采集终端通过太阳能小船自动投送到湖库中央指定区域,以便更好地采集到湖库中心地带的水质参数,进一步提高监测、预测的准确性。
[参考文献]
[1]廖海洋,杜宇,温志渝. 嵌入式多参数微小型水质监测系统的设计[J]. 电子技术应用,2011,37(1):35~41.
[2] 于强. 水质远程监测数据采集系统设计[D]. 大连:大连理工大学,2008.
[3] 朱世平. 湖库水质评价与水华预测方法研究及系统实现[D]. 北京:北京工商大学,2010.
[4] 王朋,刘毅敏,徐望明. 一种基于GPRS技术的远程水质监测系统[J]. 微计算机信息,2010,26(1):79~80.
[5] 杨小东,陆以勤,叶睿,等. 一种新型的船载防碰撞装置的研究[J]. 微电子学与计算机,2011,28(8):204~205.
[6] 孙鑫. VC++深入详解(修订版)[M].北京:电子工业出版社,2012:531~532.
[7] 黄战华, 魏凯. 基于GPRS和Socket机制实现多媒体消息传输的研究[J]. 通信技术, 2007, 11(40): 376~378.
[8] 刘东君, 邹志红. 灰色和神经网络组合模型在水质预测中的应用[J]. 系统工程, 2011, 29(9):105~109.
[9] 曾小倩,周新志.基于新陈代谢无偏灰色神经网络的水质预测模型[J].水电能源科学,2012,30(2):35~37.
[10] 张庭荣. 基于GPRS/GPS远程遥控水面移动平台系统的设计[D]. 杭州:浙江大学, 2012.
[编辑]洪云飞
[文献标志码]A
[文章编号]1673-1409(2016)07-0072-05
[中图分类号]TP751
[作者简介]申海洋(1984-),男,硕士,助教,现主要从事信号处理方面的教学与研究工作; E-mail:shen_haiyang@163.com。
[基金项目]安徽省高校自然科学研究项目(KJ2015A281);巢湖学院校级科研项目(XLY-201505)。
[收稿日期]2015-11-28
[引著格式]申海洋,李林.基于AVR的湖泊水质远程监测系统设计[J].长江大学学报(自科版),2016,13(7):72~76.
