基于Lyapunov的客车稳定域估计*
2016-04-25晏愈光许洪国刘宏飞
晏愈光,许洪国,刘宏飞†
(1. 吉林大学 交通学院,吉林 长春 130025;2. 长春师范大学 计算机科学与技术学院,吉林 长春 130032)
基于Lyapunov的客车稳定域估计*
晏愈光1,2,许洪国1,刘宏飞1†
(1. 吉林大学 交通学院,吉林 长春130025;2. 长春师范大学 计算机科学与技术学院,吉林 长春130032)
摘要:针对平面稳定域在评价车辆稳定性方面的不足,提出了客车空间稳定域的一种估计方法.建立了包含Pacejka轮胎魔术公式的客车三自由度非线性动力学模型,通过仿真和实车试验对比验证了所建模型的有效性.基于客车非线性动力学模型,构建了系统Jacobian矩阵,应用霍尔维茨(Hurwitz)判据分析了车辆系统稳定性随前轮转角变化情况以及车辆的临界状态.在构建客车系统二次型能量函数的基础上,利用Lyapunov法和车辆系统稳定特性确定了客车空间稳定域.客车在满载条件下的蛇形试验结果表明:应用上述方法确定的客车行驶稳定域能够较好地表征车辆系统稳定性,可为客车操纵稳定性评价和控制提供有益参考.
关键词:客车;稳定性;3DOF非线性车辆模型;Lyapunov方法;能量函数;稳定域
当前国内外针对车辆操纵稳定性评价的行驶稳定域分析已开展了广泛的研究.国内外主要利用简化的车辆动力学模型,对车辆系统平面稳定域进行分析和探讨[1].20世纪90年代, Samsundar和Stotsky等利用Lyapunov稳定性定理和简化三次项轮胎模型得到了转向动力学系统稳定区域的解析表达式,并用数值仿真得到了系统保守平面椭圆型稳定边界[2-3].2002年,Ko和Lee基于二自由度车辆模型,利用拓扑理论确定了不同速度和前轮转角输入时,车辆系统的相平面和稳定域[4].2007年,施树明等基于势能函数曲面分析法对二自由度车辆系统稳定域进行估计,揭示了转向车辆失稳的机理[5].2013年,王睿等利用横向载荷转移率对客车阶跃转向条件下的侧倾稳定性进行研究,为车轮侧倾稳定域提供了借鉴和参考[6].
尽管相关成果对于车辆系统稳定域研究起到了推动作用,但仍存在较大的局限性.首先,稳定域分析主要基于二自由度车辆模型,未考虑多参量稳定域问题;其次,二自由度车辆模型主要应用简化的非线性三次项轮胎公式,与实际轮胎力相差较大,显著地影响系统稳定域求解的准确性;此外,分析方法对稳定域边界约束条件的确定依据不足,从而不合理地扩大了初始条件设定的范围,导致估计的稳定域与实际相差较大.
本文基于Pacejca轮胎魔术公式建立了改进的车辆非线性动力学模型,利用Lyapunov稳定理论和系统能量分析法,对双轴客车行驶空间稳定域进行分析.这对于准确分析车辆系统稳定域及评价客车操纵稳定性具有较大意义.
1非线性动力学客车模型
1.1车辆微分方程
根据车辆的运动特点,对动力学车辆模型进行简化.设车辆在无制动力和驱动力状态下转向行驶,忽略车辆纵向和俯仰运动以及载荷转移变化等因素,由此构建包含客车横向运动、横摆运动和侧倾运动3个自由度的二轮模型.车辆平面和侧倾运动如图1所示.模型参数符号见表1.

(a) 平面运动

(b) 侧倾运动
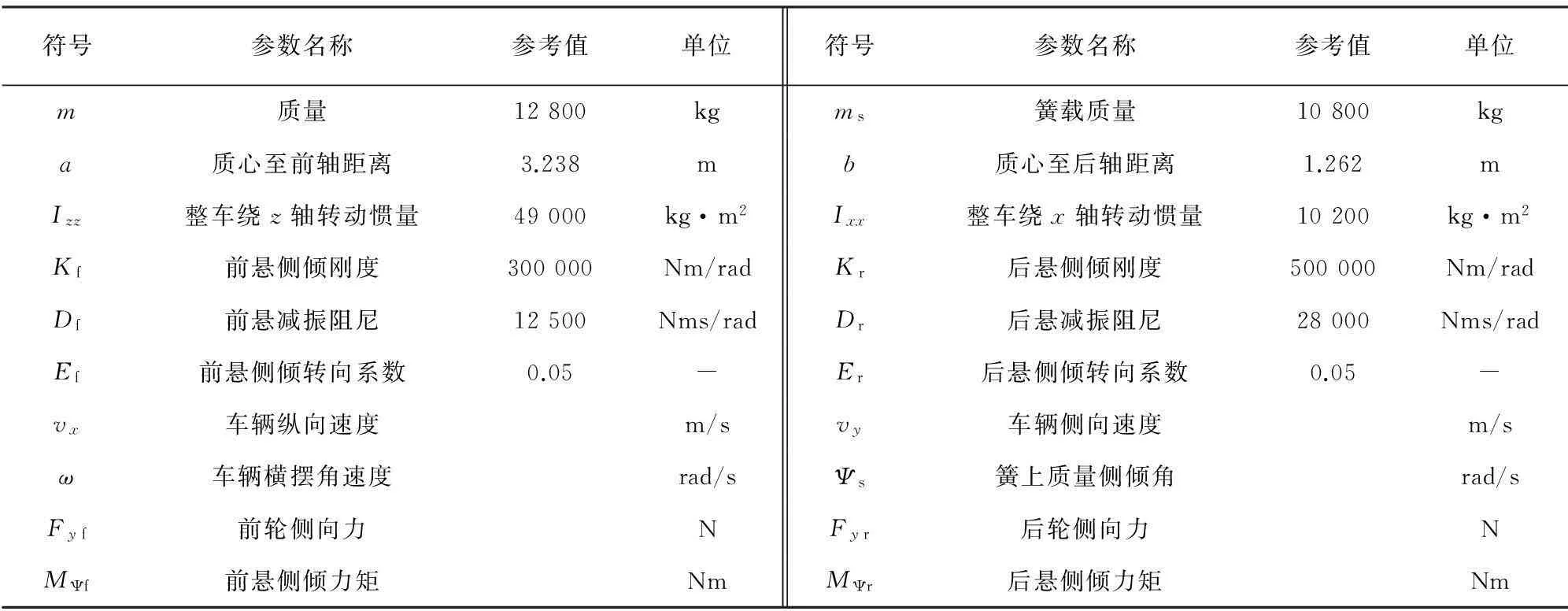
符号参数名称参考值单位符号参数名称参考值单位m质量12800kgms簧载质量10800kga质心至前轴距离3.238mb质心至后轴距离1.262mIzz整车绕z轴转动惯量49000kg·m2Ixx整车绕x轴转动惯量10200kg·m2Kf前悬侧倾刚度300000Nm/radKr后悬侧倾刚度500000Nm/radDf前悬减振阻尼12500Nms/radDr后悬减振阻尼28000Nms/radEf前悬侧倾转向系数0.05-Er后悬侧倾转向系数0.05-vx车辆纵向速度m/svy车辆侧向速度m/sω车辆横摆角速度rad/sΨs簧上质量侧倾角rad/sFyf前轮侧向力NFyr后轮侧向力NMΨf前悬侧倾力矩NmMΨr后悬侧倾力矩Nm
车辆动力学微分方程组可表达为:
(1)
其中,
1.2非线性轮胎模型
轮胎模型忽略左、右车轮的载荷转移变化,近似认为两侧车轮侧向力相等.利用纯侧偏工况下Pacejka魔术公式[6],轮胎侧偏力Fy与侧偏角α的关系可表示为:

(2)
其中,前、后轮侧偏角分别为:
式中:B,C,D,E分别为刚度因子、形状因子、峰值因子和曲率因子.影响轮胎侧偏力-侧偏角曲线因子取值的因素主要包括轮胎相关特性参数(花纹、材料、结构、载荷、气压等)和道路条件(材料、结构、湿度等)[7].干燥水泥路面(μ=0.70)条件下,某型客车各个轮胎在满载状态下的轮胎侧偏力-侧偏角曲线因子取值见表2[8].

表2 非线性轮胎曲线因子
2客车横向稳定性测试及模型验证
2.1车辆横向稳定性测试系统
客车横向稳定性测试系统如图2所示.测试系统主要包括汽车操舵力角测量仪HCZ-1, 双天线GPS运动参数测量仪RLVB20SL, 三轴角速度与加速度陀螺仪IMU02,以及模拟信号采集器RLVB-ADC03,此外还包括笔记本电脑和电源等.该测试系统可测量相关运动学变量,如转向盘转角、车辆行驶速度、加速度、横摆角速度、侧倾角以及制动距离、时间等.

图2 车辆横向稳定性测试系统
2.2试验数据处理
试验采集的数据主要利用VBOX Tools和Matlab软件进行处理.考虑到实际测量过程中设备安装位置与车辆质心位置的偏差,测试完成后要对采样数据进行后期处理.
2.2.1IMU02陀螺仪测量参数校正
IMU02陀螺仪的坐标系定义如图3所示,箭头指向代表测试参量的正向.

图3 IMU02陀螺仪坐标
由于地面坐标系和车辆坐标系均采用右手定则,因此需根据右手定则对陀螺仪采集数据进行正负坐标变换,见表3.

表3 陀螺仪采集加速度数据方向变换
2.2.2质心位置状态参数确定
由于RLVB20SL测量仪的主天线和陀螺仪未置于车辆质心,为了获得车辆质心的状态参数,就要根据试验车辆上RLVB20SL测试仪的主天线和陀螺仪的安装位置及车辆状态参量间的相互关系对测试数据进行坐标转换.
1)车辆质心纵向速度和加速度:
(3)

2)车辆质心侧向速度和加速度:
(4)

2.3动力学模型验证
通过测量客车在干燥水泥路面(μ=0.70)上的运动特性与仿真结果对比,以验证三自由度车辆模型的可信性.试验车辆实行状态及测试系统布置如图4所示.

图4 试验及测试系统布设情况
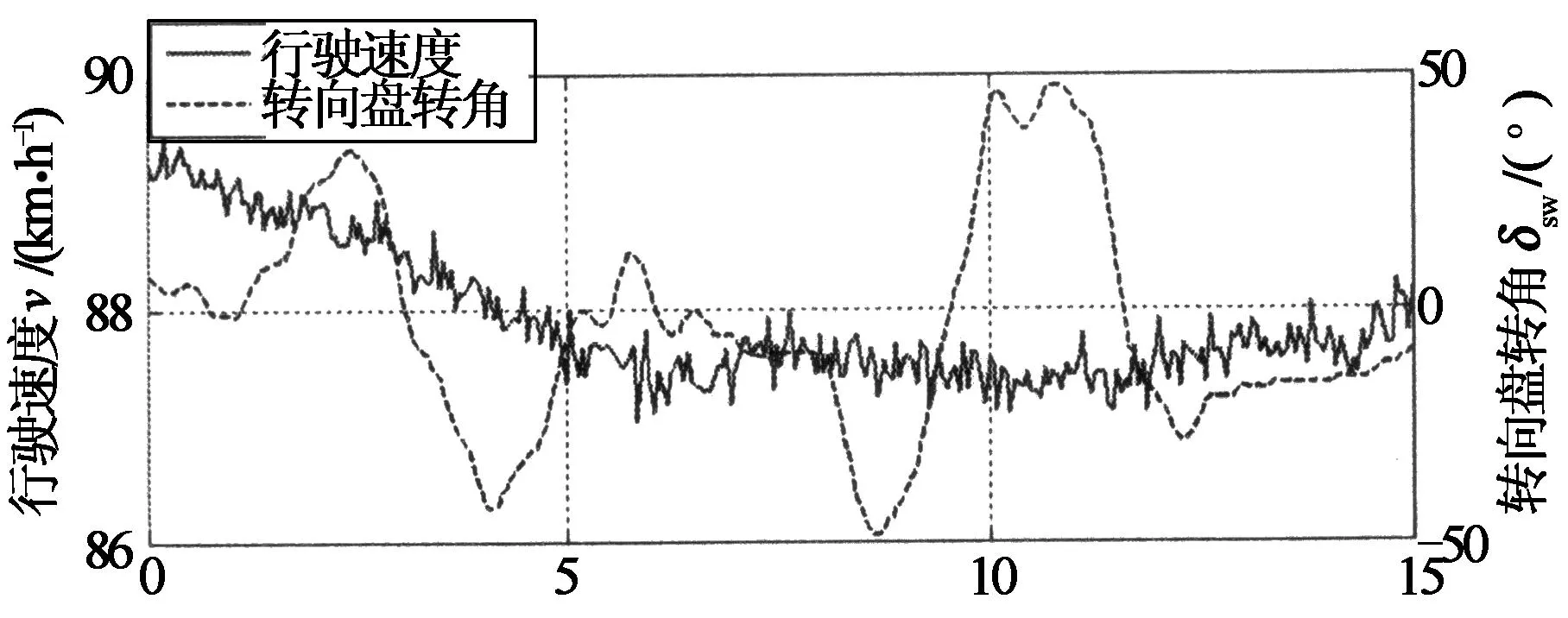
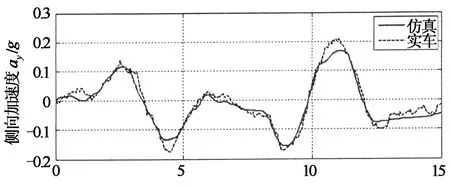
依据ISO 3888-1-1999《轿车急剧变换车道试验程序》,车辆(满载)以约90 km/h进行双移线行驶时,行驶速度和转向盘转角输入及仿真与实车试验得到的车辆侧向加速度对比情况分别如图5所示.
与实车试验结果相比,依据三自由度动力学模型仿真得到的车辆侧向加速度曲线在变化趋势和变化范围方面都具有较好的一致性,误差在10%以内,因此可认为车辆动力学模型是可信的,可为下一步研究提供依据.
t/s
t/s
3客车非线性系统稳定性判定


(5)
当δf≠0时,系统在平衡点处的Jacobian矩阵可表示为:
(6)
Jacobian矩阵A的特征方程为:
λ4+c1λ3+c2λ2+c3λ+c4=0.
(7)
根据Hurwitz判据[9],有:
(8)


特征根实部
图6中箭头所指方向为系统Jacobian矩阵特征根4实部随前轮转角变化方向.由图可见,当前轮转角较小时,系统Jacobian矩阵特征根实部均为负值,特征根3和4虚部为0;随着前轮转角的增大,各特征根有向原点靠近的趋势;当前轮转角约为0.042rad时,特征根4为0,此时系统处于稳定形式改变的临界状态.这说明根据Hurwitz判据,通过车辆系统特征值能够准确地掌握系统状态,系统由稳定向失稳的转变是一个规律性的变化过程,由此可确定车辆系统稳态临界值.
4客车空间稳定域估计
由上述分析可知,当车辆以一定速度转向行驶时,系统Jacobian矩阵特征根是体现系统稳定性的重要方面.传统的基于相平面的稳定域分析没有全面考虑系统稳定性特性,从而不合理地扩大了初始条件设定的范围,导致求得的稳定域与实际相差较大.因此,在分析车辆系统稳定性的基础上,本文基于Lyapunov法结合车辆系统稳定特性估计客车空间行驶稳定域.
4.1Lyapunov函数构建
根据Lyapunov稳定性定理,由于系统的复杂性和多样性,有必要虚构一能量函数作为Lyapunov函数.设定一正定函数V(x):
(9)

并且矩阵P满足[2]:
ATP+PA=-I.
(10)
式中:I为单位矩阵;A是系统在原点的Jacobian矩阵,见下式.

A=

相应地根据式(10),计算Lyapunov函数对应的正定对称矩阵P为:
P=

4.2车辆系统稳定域边界条件

因此,汽车稳定域边界条件可表示为:
4.3车辆行驶稳定域求解
根据稳定域边界条件,当客车纵向速度为20km/h时,包含质心侧偏角、横摆角速度及侧倾角的车辆空间稳定域如图7所示.
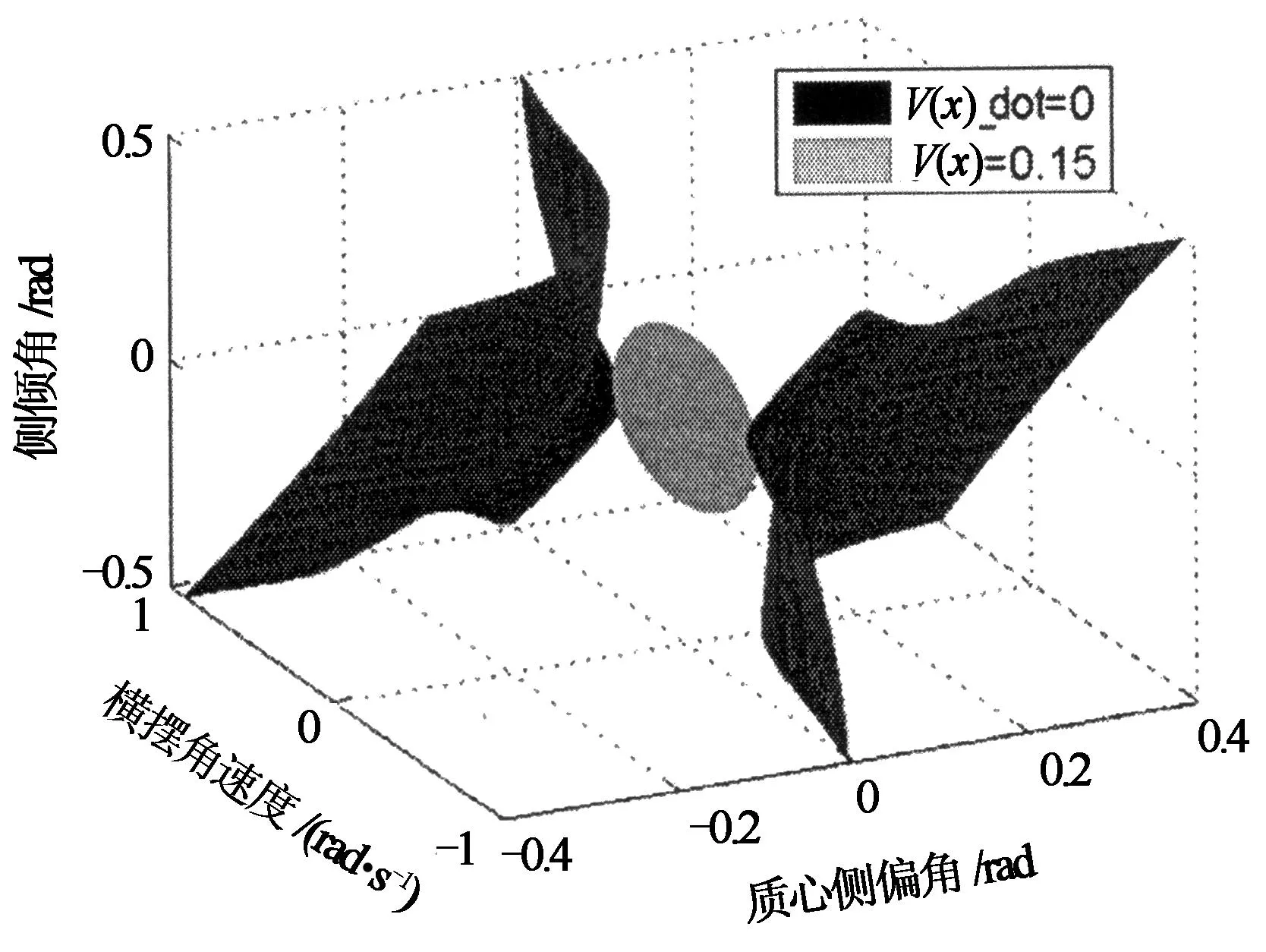
图7 20 m/s时V(x)_dot=0和V(x)=0.15
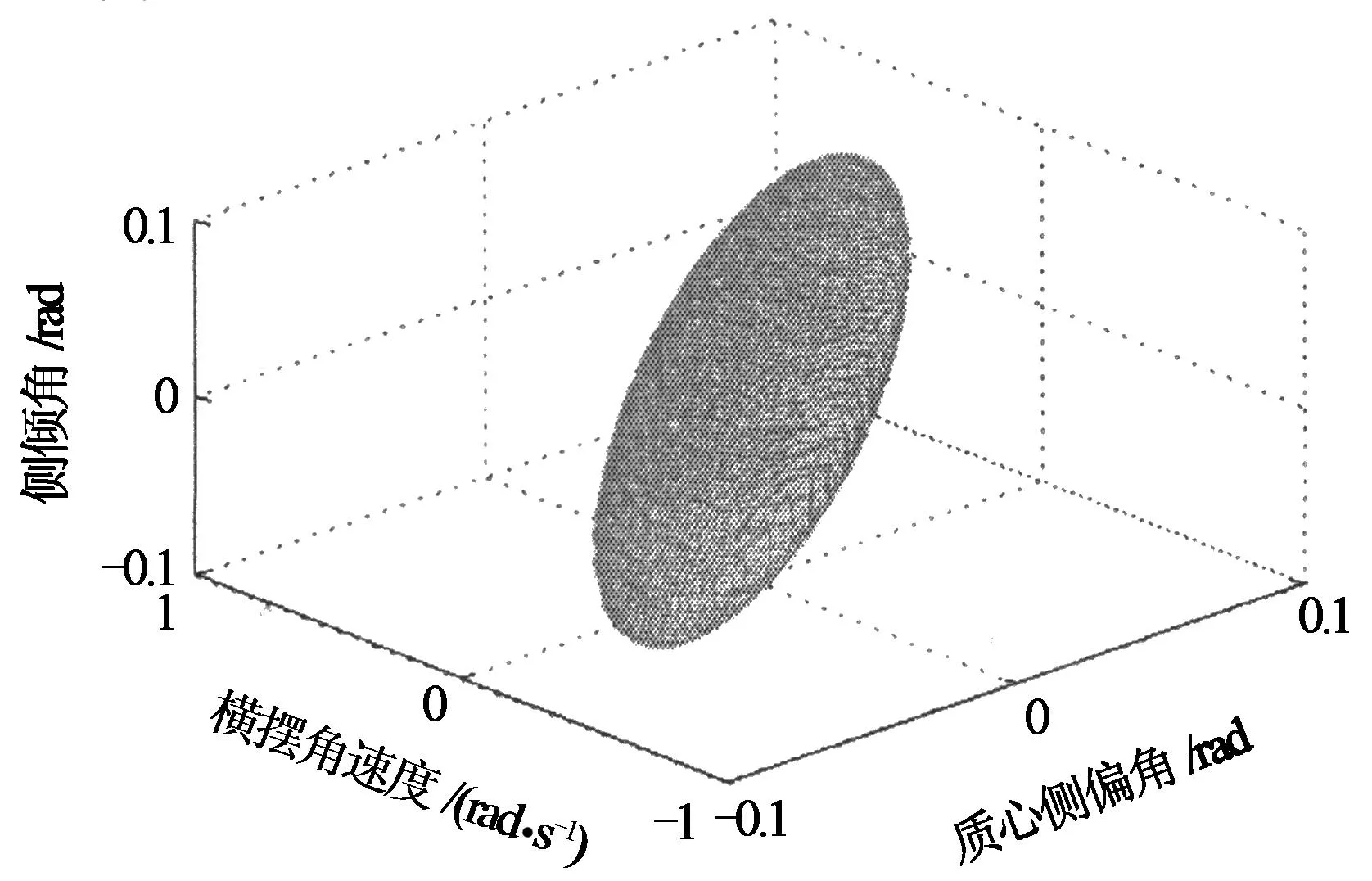
图8 20 m/s时V(x)=0.15确定的空间稳定域
5行驶稳定域试验分析
利用集成测试系统,测量客车在正常路面条件下定车速蛇形行驶时的运动情况.试验车辆在试验过程中保持车速约为20m/s,依据GB/T6323.1—94《汽车操纵稳定性试验方法—蛇形试验方法》进行.试验测得的车辆质心侧偏角和横摆角速度以及侧倾角参量值分布与计算得到的车辆空间行驶稳定域对比如图9所示.
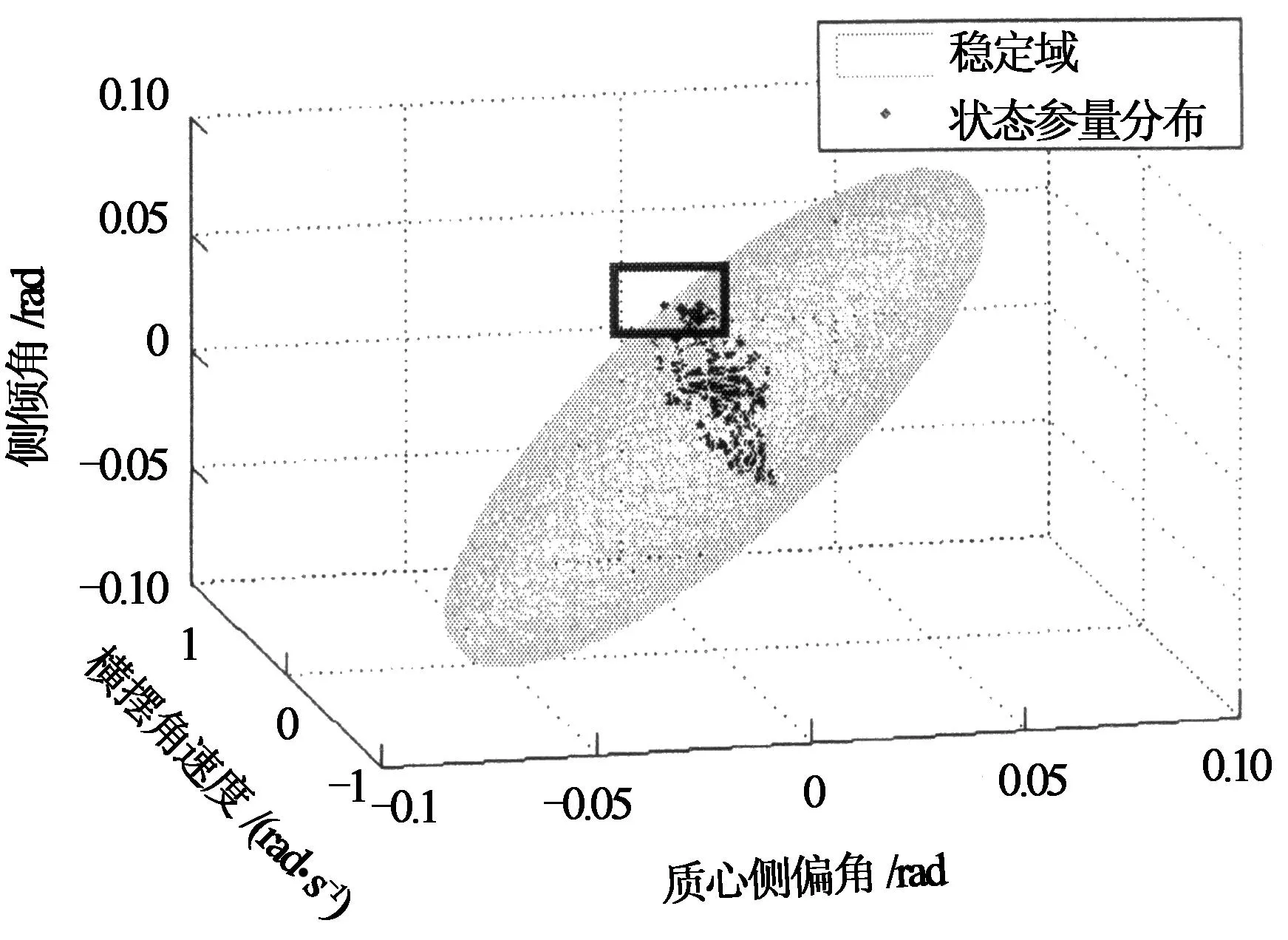
图9 蛇形试验车辆运动参量分布情况
车辆状态参量分布基本在稳定域内,但在峰值转角区附近,车辆状态参量已超出稳定域.这说明当客车高速蛇形运动、转向盘转角达到最大角度时,车辆已经达到极限状态,并且超出自身行驶稳定域范围.如图10所示,此时车辆的最大加速度已超过0.5g,超出车辆极限状态,实际上车辆在行驶过程中已经发生轻微侧滑现象,表明车辆已达到甚至超出极限状态.
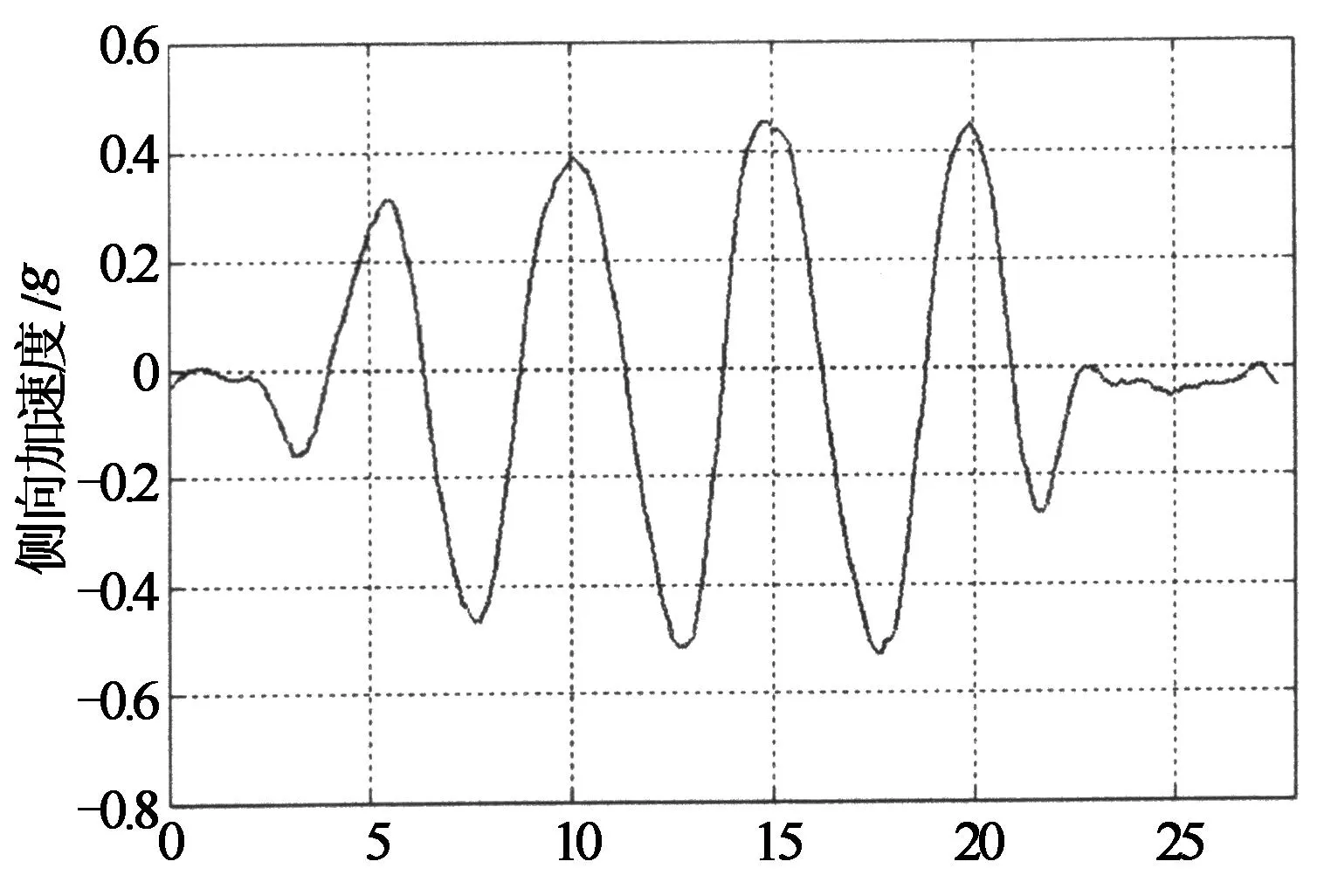
t/s
由试验结果可知,计算得到的稳定域能够较好地界定车辆系统稳定和非稳定状态.常规蛇形试验主要依据通过时间和速度,相比之下,稳定域评价能够更加形象地表达车辆失稳的极限状态,并且通过稳定域的大小可有效评价车辆操纵和行驶稳定性.试验验证结果表明,基于Lyapunov法和系统稳定性理论估计的车辆空间行驶稳定域具有可靠性.
6结论
基于系统动力学理论建立了客车三自由度非线性动力学模型,并通过试验结果验证了模型的可靠性.结果表明,利用Pacejka魔术公式建立的三自由度车辆动力学模型仿真与试验结果具有较好的一致性,能较准确地描述车辆在平直路面、匀速行驶状态下的运动情况.
利用Jacobian矩阵和Hurwitz判据分析了车辆非线性系统稳定性随输入的变化情况.结果表明,一定车速条件下,随着前轮转角的增大,系统特征根变化能够准确地反映车辆横向稳定性.车辆系统由稳定向失稳的转变是一个规律性的变化过程,系统稳定性状态可通过特征根形式的量化值表现,基于此可确定车辆系统稳态临界值.
基于Lyapunov法和车辆系统稳定性理论分析求解了车辆行驶空间稳定域.实车试验和稳定域的分析结果表明,Lyapunov法和车辆系统稳定性理论能够互为补充,真实地反映车辆系统的实际运动状态.利用该方法求得的车辆行驶稳定域能够较好地反映车辆稳定和失稳状态,可为车辆操纵稳定性评价和车辆系统控制提供参考.
参考文献
[1]郭孔辉.汽车操纵力学[M].长春:吉林科学技术出版社,1991:9-10.
GUOKong-hui.Vehiclehandlingdynamics[M].Changchun:JilinScienceandTechnologyPress, 1991: 9-10.(InChinese)
[2]SAMSUNDARJ,HUSTONJ.Estimatinglateralstabilityregionofanonlinear2degree-of-freedomvehicle[R].SAEPaper981172.Washington,DC:SAEInternational, 1998.
[3]STOTSKYA,HUX.Stabilityanalysisofrobustlydecoupledcarsteeringsystemwithnonlineartiremodel[C]//Proceedingsofthe36thIEEEConferenceonDecisionandControl.NewYork:IEEE, 1997:4750-4755.
[4]KOYE,LEEJM.Estimationofthestabilityregionofavehicleinplanemotionusingatopologicalapproach[J].InternationalJournalofVehicleDesign, 2002, 30(3), 181-192.
[5]施树明,毛振勇,向辉,等.车辆转向稳定性非线性分析方法研究[J]. 机械工程学报, 2007,43(10):77-81.
SHIShu-ming,MAOZhen-yong,XIANGHui, et al.Researchonthenonlinearmethodforvehiclesteeringstability[J].ChineseJournalofMechanicalEngineering, 2007, 43(10):77-81. (InChinese)
[6]王睿,李显生,仁园园,等.基于横向载荷转移量的客车侧倾稳定性分析[J].湖南大学学报:自然科学版, 2013, 40(5): 49-54.
WANGRui,LIXian-sheng,RENYuan-yuan, et al.Rollstabilityanalysisofpassengercarbasedonlateral-loadtransferrate[J].JournalofHunanUniversity:NaturalSciences, 2013, 40(5):49-54. (InChinese)
[7]PACEJKAHB.Tyreandvehicledynamics[M].Oxford,UK:Butterworth-Heinemann, 2002:172-175.
[8]BAKKERE,NYBORGL,PACEJKAHB.Tiremodelingforuseinvehicledynamics[R].SAEPaper870421.Washington,DC:SAEInternational, 1987.
[9]黄永念.非线性动力学引论[M].北京:北京大学出版社,2010:32-36.
HUANGYong-nian.Introductiontononlineardynamics[M].Beijing:PekingUniversityPress, 2010:32-36. (InChinese)
[10]刘延柱,陈立群.非线性动力学[M].上海:上海交通大学出版社,2000: 56-60.
LIUYan-zhu,CHENLi-qun.Nonlineardynamics[M].Shanghai:ShanghaiJiaotongUniversityPress, 2000: 56-60. (InChinese)
Estimation of the Stability Region of Bus Based on Lyapunov
YAN Yu-guang1,2, XU Hong-guo1,LIU Hong-fei1†
(1. College of Transportation, Jilin Univ, Changchun, Jilin130025, China; 2. College of Computer Science and Technology, Changchun Normal Univ, Changchun, Jilin130032, China)
Abstract:In order to address the deficiency of vehicle plane stability region, according to the nonlinear vehicle dynamic model, a method of estimating vehicle spatial stability region was proposed. A 3DOF bus model with Pacejka Magic Formula tire model was deduced and verified by comparing vehicle tests. Based on the Jacobian matrix of the dynamic system, the stability of the vehicle system was discussed with Hurwitz criterion. In addition, by establishing a generalized function for bus system, the full loaded vehicle’s spatial stability region in 20 m/s was given on the basis of Lyapunov theory and vehicle system characteristics. A vehicle test in the same condition has shown that the calculated stability region defined by Lyapunov and system stability theorem has a good effect on characterized vehicle stability. It will be a valuable reference for vehicle stability evaluation and control.
Key words:bus; stability; 3DOF nonlinear vehicle model; Lyapunov methods; energy function; stability region
中图分类号:U461.6
文献标识码:A
作者简介:晏愈光(1981-),男,吉林长春人,吉林大学博士,长春师范大学讲师†通讯联系人,E-mail: liuhongfei68@yahoo.com.cn
基金项目:国家科技支撑计划项目(2009BAG13A04);国家高技术研究发展计划(“863”计划)项目(2009AA11Z201)
*收稿日期:2015-01-23
文章编号:1674-2974(2016)02-0015-07
