一种基于Haar-like特征和Adaboost树形分类器的实时车辆识别方法研究
2016-04-18黄飞
黄 飞
宿州学院机械与电子工程学院,安徽宿州,234000
一种基于Haar-like特征和Adaboost树形分类器的实时车辆识别方法研究
黄飞
宿州学院机械与电子工程学院,安徽宿州,234000
摘要:针对SVM分类器和Adaboost分类器存在识别性能不足和训练时间过长等问题,提出了一种基于Haar-like特征,并结合Adaboost树形分类器的实时车辆识别方法。在训练阶段,提取车辆样本集合中适合描述车辆表观的Haar-like特征,并将这些特征向量引入Adaboost算法中进行最优特征选择和强分类器的训练,最后利用强分类器构建一个决策树(也称为树形分类器)。该阶段进行多轮的反馈迭代训练,且不断添加新的样本以提高识别性能。在识别阶段,使用分类器对视频中的每一帧图像作多尺度遍历搜索,以判定车辆可能存在的区域。实验表明,本文提出的方法在识别性能上有所提高,同时可以有效缩短训练时间。
关键词:车辆识别;Haar-like特征;Adaboost分类器
1问题的提出
特征信息结合机器学习的目标识别方法,由于其识别性能出色、鲁棒性好得到越来越广泛的应用。NOSPIDE介绍了一种PCA提取特征结合SVM分类器的车辆识别方法[1],SUN提出采用Haar小波特征结合SVM识别车辆[2]。这两种基于SVM的机器学习方法在提取特征时计算量过大,且特征描述能力不足,影响算法的识别性能;同时基于径向基核函数的SVM参数选择过程复杂,且易陷入局部极小。另一种机器学习方法Adboost在人脸检测上应用十分成功[3-5],目前也逐渐被引入车辆识别领域,Stojmenovic介绍了以边缘和颜色特征为基础的Adaboost分类器的车辆检测方法[6],CHANG提出一种训练Adaboost级联分类器识别车辆的方法[7]。本文在分析车辆表观特征的基础上,借鉴Haar-like特征在人脸检测的应用经验,提出了一种基于Haar-like特征和Adaboost树形分类器的车辆识别算法。
2基于Haar-like特征和Adaboost树形分类器的实时车辆识别方法
2.1算法结构
算法包括两个过程:训练过程和识别过程。
训练过程的主要工作是收集大量的车辆图像作为正样本以及易于和车辆混淆的图像作为负样本,接着提取适合描述车辆表观的Haar-like特征,并用于Adaboost每一级分类器的训练。训练过程中选取的Haar-like特征十分关键,需要在二维图像中最大可能地和车辆表观特征相吻合,这将决定算法整体的准确率。
识别过程首先确定算法的感兴趣区域ROI,即车辆存在可能性较大的区域,然后利用已经离线训练完成的分类器对ROI区域采用多尺度窗口遍历搜索识别,将区域内的灰度特征输入Adaboost分类器中识别。如果分类器判定区域内特征符合车辆目标,则合并多尺度识别窗口和各级分类器识别区域,锁定车辆的具体位置和尺寸。
为进一步提高分类器的识别效果,采用反馈式训练过程,即将每轮分类器测试中没有被正确分类的车辆目标加入到下一轮训练的正样本集合,将误识别的非车辆目标加入到下一轮训练的负样本集合。训练过程和识别过程算法流程见图1所示。
2.2Haar-like特征
Haar-like特征是一种描述局部灰度变化的矩形特征。本文选用12种Haar-like矩形特征模板表示车辆目标,其中11种来自Lienhart R提出的扩展库,1种为本文添加的一个单矩形特征来表示车辆底部的阴影,如图2所示。

图1 训练过程和识别过程算法结构图

图2 本文采用的Haar特征
灰度图像中车辆目标的局部特征可以由Haar-like矩形特征描述,如车灯比周围颜色要亮,车牌区域比车体颜色要亮,车辆底部的阴影区域相对附近区域颜色要深等。车辆目标由Haar-like特征联合表示,见图3。
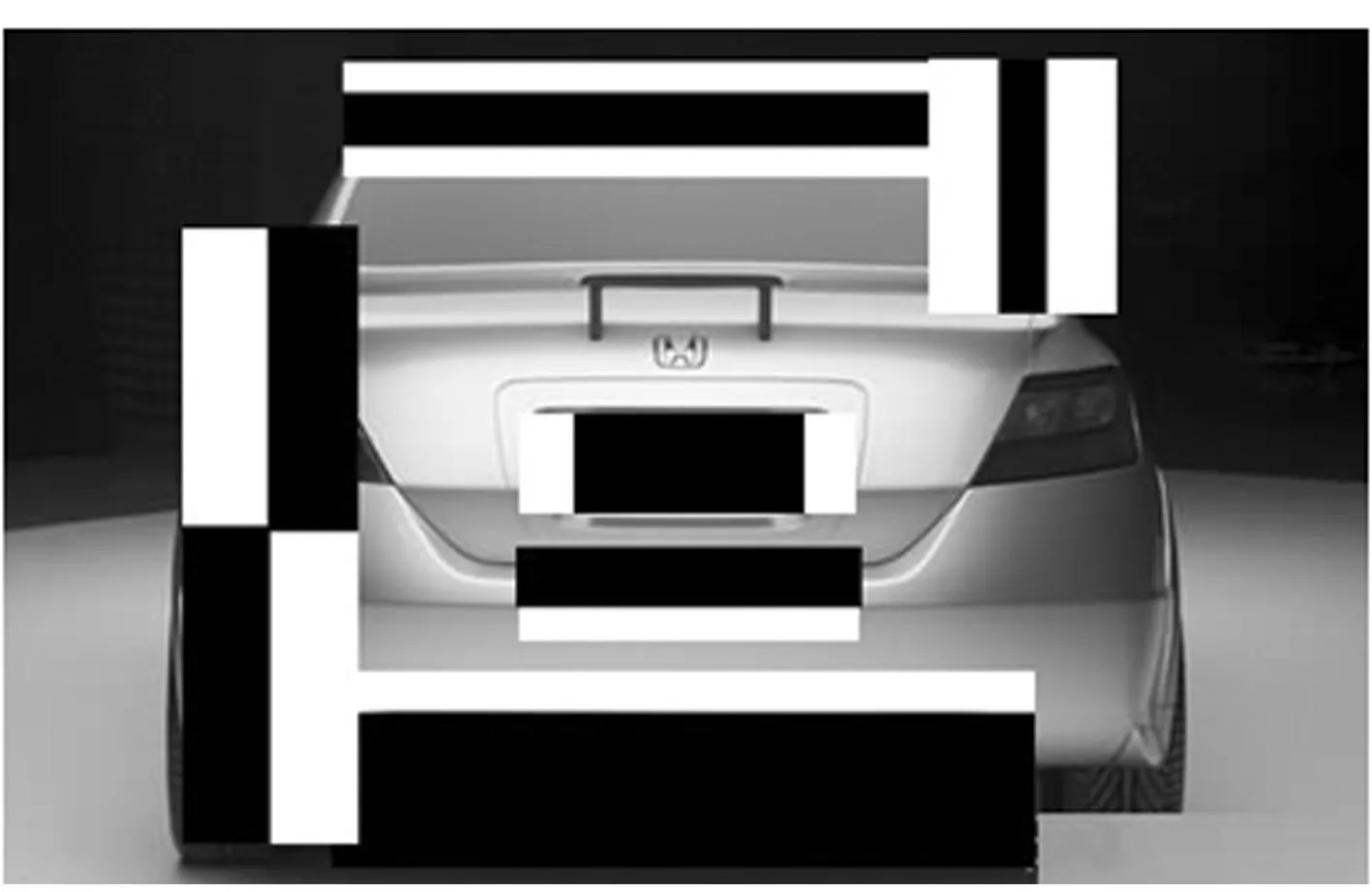
图3 Haar-like特征表示车辆的示例
2.3图像预处理和积分图计算
首先,对所有的训练正负样本进行灰度化和归一化处理(大小为30×30pixel,为表述方便,以下省略单位),然后遍历灰度图像计算该图像的积分图。对于30×30的灰度图像,其中所包含的Haar矩形特征数量十分庞大,如果每次提取Haar特征都要遍历并计算区域内所有像素值,耗时太长,不能满足算法的实时性要求,所以利用积分图方法计算每一个灰度图像,为下一步特征的提取节省时间。在识别阶段,也利用积分图方法统计每一帧图像,优化系统的实时性。
2.4训练弱分类器
一帧30×30灰度图像中提取的Haar-like特征高达数万个,如果将每一个特征都用于目标分类识别,所带来的计算量和耗时都是实际应用时不可能接受的。因此,利用Adaboost算法选取关键特征是分类器训练中至关重要的一步。
Adaboost是一种迭代算法,其核心思想是选取分类错误最小的若干个Haar-like特征分类器作为弱分类器,然后根据分类错误率赋予弱分类器不同的权值,线性组成一个强分类器。
设在所有训练样本中提取的Haar特征集合为A:

其中,n为训练样本的个数,m为30×30大小的灰度图像所提取的Haar-like特征的个数,αij表示第j个样本里第i个Haar特征的值。集合A中的每一个Haar-like特征都可以构造一个分类器,形式如下:

其中,Pk(Pk∈{1,-1})表示分类的类别:1表示车辆,-1表示非车辆。hk表示特征aij构成的分类器,θk为分类器hk的阈值。
弱分类器训练过程是对训练样本集合中的每个样本赋予相等的初始权值,穷举所有特征构成的分类器hk遍历训练集合中的样本进行分类,选择hk中分类错误最小的特征值和适合的阈值θk作为弱分类器。一轮训练结束后,根据弱分类器分类的准确性更新训练集合中每个样本的权值:提高误分类样本的权值,降低正确分类样本的权值,继续对训练样本集合遍历分类。如此反复,经过多轮的迭代训练,在弱分类器分类准确率达到预定值后,训练结束。
2.5训练强分类器
鉴于弱分类器有限的分类效果,根据训练完成后弱分类器的分类准确率赋予其不同的权值,最后将加权的弱分类器线性组合形成强分类器。
训练强分类器的过程如下:
定义X为训练样本集合;Y为样本的标签集合,表示样本的类别:车辆样本或非车辆样本。xi∈X,Yi∈Y={-1.tif,+1},则训练集合Z为(x1,y1),(x2,y2),…,(xn,yn)。初始化时赋予每个样本xi相同的权值1/n,Dt(i)表示经过t次迭代更新后样本(xi,yi)的权值。
(2)分类总错误εt最小的ht确定为本轮的分类器,加入到强分类器;

(4)更新样本的权值:Dt+1(i)=Dt(i)exp[-αtyiht(xi)],归一化∑Dt+1(i)=1;
(5)重复迭代过程T次,最终得到的强分类器输出为:

目标的分类判定由若干个不同权重的弱分类器投票决定,其中权重与训练中的分类错误成反比关系。需要注意的是,如果本轮训练后的强分类器的分类错误率大于50%,则终止训练,需要寻找效果更好的特征加入到训练中。强分类器的训练算法流程图如图4所示。

图4 训练强分类的算法流程图
在实时识别过程中,强分类器的输出首先会同预先设定的阈值进行比较,之后作出结果判定。若阈值设定较低,则识别率会升高,但误识率(即虚警率)也会随之增大。
2.6训练树形分类器
基于Adaboost算法训练的强分类器识别率和误识率之间相互制约,本文提出构建树形分类器的方法,在维持高识别率的前提下,能降低算法的误识率。
树形分类器是由多个强分类器构成的决策树,决策树内部每一层的节点都是一个强分类器。在训练过程中,采用K-means聚类算法,将Haar-like特征值相似的样本划分成一个集合,再利用聚类后的若干个样本集合训练强分类器。这种训练方式允许强分类器在特定条件下拆分成多个分支,可以解决不同拍摄角度所带来的车辆差别问题,提高车辆识别率。整个树形分类器的分支是通过聚类-分支算法递归构造出来的,可以看作是节点的训练和拆分过程,直到达到某个深度结束。
3实验与分析
本文的实验数据来自于交通路口和城市道路的监控视频,目前从视频中收集了20000个正样本和10000个负样本。正样本主要是可见度较好情况下车辆的前后视图,其中涵盖了城市中较为常见的车辆类型和颜色,且对同一车辆截取了5个不同拍摄角度的图像以增强算法的分类性能,见图5所示。

图5 正样本示意图
负样本不含任何的车辆特征,主要是交通场景中常见的目标,包括路边的树木、建筑物、道路路面、交通标识。多轮训练过程中,每一轮的误识别目标也会加入到下一轮训练的负样本集合,例如行人、非机动车辆和阴影区域等被错误分类为车辆的目标。不断更新有针对性的负样本,有利于降低算法的误识率。负样本如图6所示。

图6 负样本示意图
在构建的训练样本库上,采用Visual Studio 2008搭载OpenCV2.4.2库作为实验平台,验证文中算法的有效性和可行性。实验中对3段视频中的1713个有效车辆目标进行识别分类,成功识别1665个车辆,识别率为97.20%。误识的非车辆数为157,虚警率为9.16%。具体统计结果如表1所示。

表1 车辆识别算法测试的统计情况
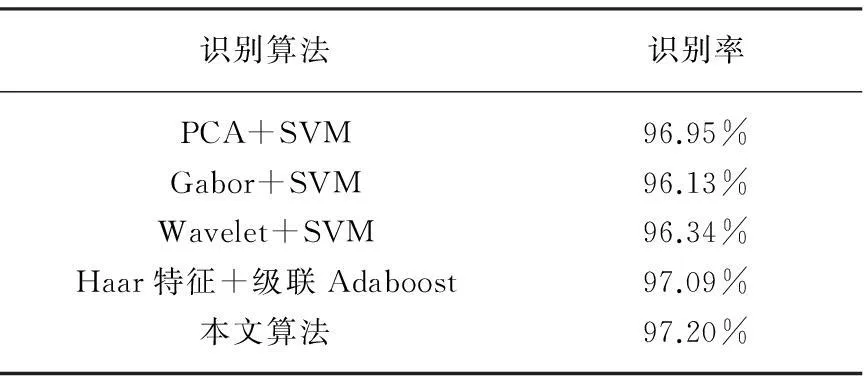
表2 识别算法的比较结果
将文中方法与常见的车辆识别算法比较,评估结果见表2。文中算法在Adaboost级联分类器[8]基础上改进,两者的性能比较如下:在算法的实时性上,级联分类器为87.8帧/s,本文算法为98.4帧/s;在识别率和虚警率上,树形分类器和级联分类器的ROC曲线见图8。

图8 两种分类器的ROC曲线比较
在实际测试过程中,与级联分类器相比,本文提出的算法识别效果更为出色。图9(a)为级联分类器的识别效果图,图9(b)为本文算法效果图,对比后发现,本文提出的算法正确识别的车辆个数更多,而且对拍摄角度不理想的车辆侧面图像和远处图像也表现出优良的识别效果。

图9 两种识别算法的效果图
4结束语
本文对车辆前后视图的表观特征进行研究,提出了一种基于Haar-like特征和Adaboost树形分类器的前后向车辆识别方法。文中采用扩展Haar-like特征描述车辆,训练阶段提取车辆样本集合中适合描述车辆表观的Haar-like特征,并将这些特征向量引入Adaboost算法中进行最优特征选择和强分类器的训练,最后利用强分类器构建一个树形分类器。文中训练完成的树形分类器,在实时性、识别率和虚警率上取得了比传统方法更好的效果,证明了文中算法的有效性。
参考文献:
[1]Nospide J,Salgado L.Region-dependent vehicle classification using PCA features[C]//IEEE International Conference on Image Processing. Washington DC:IEEE Computer Society,2012:453-456
[2]Sun Z,Bebis G,Miller R.On road vehicle detection using Gabor filters and support vector machines[C]//IEEE 14th International Conference on Digital Signal Processing.Santorini,Hellas(Greece),2002:1019-1022
[3]Viola P,Jones M. Rapid object detection using a boosted cascade of simple features[C]//In Proceeding of International Conference on Computer Vision and Pattern Recognition.Kauai HI,USA,2001(1):511- 518
[4]Viola P,Jones M.Robust real-time face detection[J].International Journal of Computer Vision,Published by Springer,2004,57(2):137-154
[5]Lienhart R,Maydt J.An extended set of Haar-like features for rapid object detection[C]//The IEEE International Conference on Image Processing.New York,USA,2002(1):900-903
[6]Stojmenovic M.Real time object detection in images based on an AdaBoost machine learning approach and a small training set[C]//Proceedings of 12th Int Work shop on Systems,Signals&Image Processing. Chalkida,Greece:Inderscience Enterprises Ltd,2005:117-122
[7]Wen Chung Chang,Chi-Wei Cho.Online boosting for vehicle detection[J].IEEE Transactions on Systems, Man, and Cybernetics,Part B:Cybernetics. Published by Institute of Electricaland Electronics Engineers,Inc,2010,40(3):892-902
[8]方学志,方巍,郑钰辉.一种基于类Haar特征和改进Adaboost分类器的车辆识别算法[J].电子学报,2011,39(5):1121-1126
(责任编辑:汪材印)
敬告作者
经中国知网授权,我刊已启用中国知网“学术不端行为检测系统”,对所有来稿在初审时都要进行学术不端行为检测,检测后,凡重合率超过20%(含20%)的稿件一律退稿。若初检遗漏,文章发表后进入相关数据库复检时,重合率超过20%(含20%)的一律不进入数据库,对已进入数据库的一律删除,且发表费用不退。科研诚信是每一位科技工作者基本的职业操守,希望各位作者坚守职业操守,诚信投稿,谢谢合作!
《宿州学院学报》编辑部
中图分类号:TP391.4
文献标识码:A
文章编号:1673-2006(2016)01-0111-04
作者简介:黄飞(1986-),安徽宿州人,硕士,助教,主要研究方向:计算机视觉。
基金项目:宿州学院科研平台项目(2014YKF37;2014YKF11)。
收稿日期:2015-11-18
doi:10.3969/j.issn.1673-2006.2016.01.031
