一类基于比率与时滞依赖的捕食-食饵系统的随机模型
2016-04-16孙杰
孙 杰
(南京财经大学 应用数学学院,江苏 南京 210046)
一类基于比率与时滞依赖的捕食-食饵系统的随机模型
孙 杰
(南京财经大学 应用数学学院,江苏 南京210046)
摘要:研究一类两种群随机Lotka-Volterra捕食-食饵模型.在时滞作用的影响下,在外界环境噪音的假设下,证明系统存在唯一正的全局解,并且这个解是随机最终有界的.
关键词:随机捕食-食饵系统;伊藤公式;随机最终有界
研究者对捕食-食饵系统的研究持续不断.20世纪20年代Vito Volterra提出,是否存在这样一种模型,可以解释Adriatic海中鱼种群数量的波动,因为渔民们非常关注这种波动,特别是出现较少鱼群的时段.在假设鲨鱼和其他小鱼群处于捕食者-被捕食者关系的基础上,Volterra(1926)构造了一个模型,A·J·Lotka(1925)在同一时间不同场合也构造了类似的模型,后来人们称它Lotka-Volterra模型.
这里描述的模型是按Volterra建议的,设x(t)和y(t)为在t时刻其他小鱼群与鲨鱼的数量,假设为鱼种群提供的浮游生物是无限制的,因此,鱼种群的平均增长率在没有鲨鱼时是常数,从而,如果没有鲨鱼则鱼种群满足微分方程dx/dt=λx.另一方面,鲨鱼以鱼种群为食物,假设没有鱼种群时鲨鱼的平均死亡率是常数,因此,在没有其他小鱼群时鲨鱼种群满足微分方程dy/dt=-μy.假设鱼的出现使得鲨鱼的平均增长率由-μ增长到-μ+cx,鲨鱼的出现使得鱼种群的增长率由λ变为λ-by,这就给出了Lotka-Volterra方程
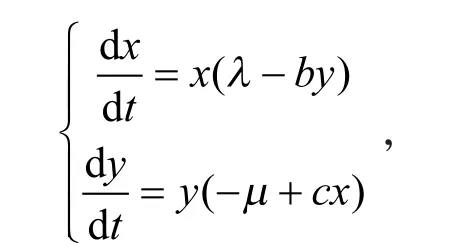
不能解析求这个系统,但可以得到其解的性态的某些信息.Lotka-Volterra 模型代表早期种群生物学尝试用数学建模的一个成功模型.
1965年,Holling在实验的基础上,对不同类型的物种,提出了三种不同的功能性反应函数“R-M模型”,在文献中通常被称为具有Holling II类功能性反应的捕食者-食饵系统.对于“R-M模型”,许多学者进行了深入研究.Rosenzweig和MacArthur[1],Rosenzweig[2-3]和Maynard[4]分析了捕食者-食饵的作用,提出一类比Volterra模型和Leslie模型更为真实的模型,即Rosenzweig-MacArthur模型
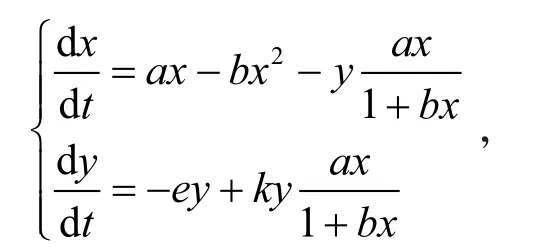
其中a,b,e,k均为正常数.Rosenzweig和MacArthur[1]用图表法结合数值法研究了“R-M模型”的稳定性,陈兰荪和井竹君[5]用微分方程定性分析的方法对“R-M模型”作了详细完整的分析,讨论了极限环的存在性和唯一性;Hsu和Huang[6]研究了“R-M模型”的全局稳定性.最近,这一模型的非自治情形受到学者的重视.贾建文、胡宝安[7]考虑非自治系统的周期解存在性与全局吸引性问题,范猛、王克[8]进一步考虑了时滞的系统,利用重合度理论得到保证系统存在正周期解的充分性条件.
近年来,随机微分方程被广泛的研究,特别是随机捕食-食饵种群动态系统.传统的两种群自治或非自治的确定性的Lotka-Volttera捕食-食饵模型的形式为

式中x(t)和y(t)分别表示食饵种群和捕食者种群的密度.然而,种群的变化难免会受到环境噪声的影响,这种影响是生态系统中的一个重要成分.
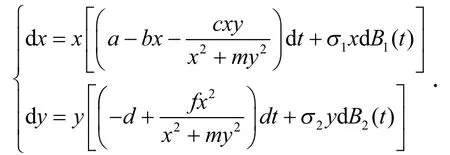
本文把环境噪音的因素考虑在系统(1)中,研究基于一类比率与时滞依赖的捕食-食饵系统

式中:a,b,c,d,f,m都为参数;a/b>0表示食饵种群承载能力;d>0表示捕食者种群的自然死亡率;a,c,m,f都为非负数且分别表示内禀增长率、最大食饵消耗率、半饱和常数和转化率.这里的Bi(t)(i=1,2)是环境污染,称为白色噪音,σi(t)(i=1,2)表示白色噪音的强度,Bi(t)(i=1,2)是标准的布朗运动.
本文将系统(2)化为


本文研究系统(2),在适当的环境污染假设下,随机Lotka-Volterra 捕食-食饵系统有唯一的正的全局解,而且这个正解随机最终有界.
1 预备知识

那么系统(2)被称为随机最终有界[9].

定义3(伊藤公式) 设dx(t)=udt+vdB(t)是n维Ito过程,g(t,x)=(g1(t,x),…,gp(t,x))是从[0 ,∞ ]×Rn到Rp的C2映射,那么过程x(t,w)=g[t,x(t)]也是一个Ito过程,它的分量Yk为

2 定理的证明
定理1 若假设H1成立,那么系统(2)对于任意初值在t≥0上有唯一的正的全局解(x(t),y(t))[11].

并且
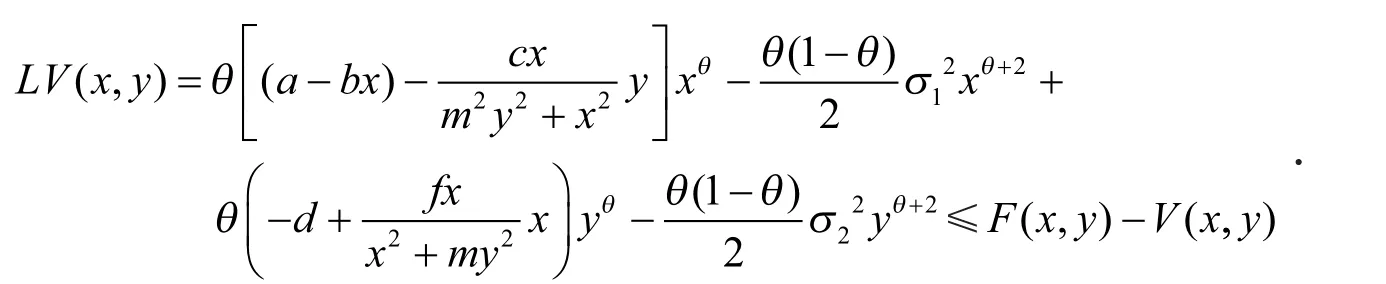
式中

这里的F(x,y)有界,那么存在一个常数K1∈R+,因此有F(x,y)≤K1,从而得到

再次应用伊藤公式,得到


令k→∞,有

这说明

因为且

所以有

这说明
令证明完毕.
定理3 如果假设H1成立,那么系统(2)随机最终有界.
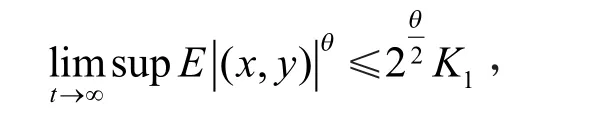
证明 根据定理2,令θ=1/2,那么存在一个常数K2使得

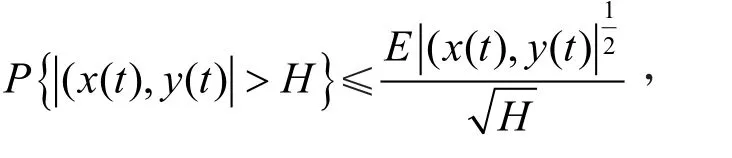
因此

这说明

3 结论
本文研究一类两种群随机Lotka-Volterra捕食-食饵模型,在时滞作用的影响下,在外界环境噪音的假设下,通过应用伊藤公式、 Chebyshev不等式等随机微分方程相关知识,证明系统存在唯一正的全局解,并且这个解随机最终有界.
参考文献
[1]ROSENZWEIG M L,MACAR R.Graphical representation and stability conditions of predator-prey interactions[J].Amer Nat.1963,97:209-223.
[2]ROSENZWEIG ML.Why the prey curve has a hump[J].Amer Nat,1969,103:81-87.
[3]ROSENZWEIG M L.Paradox of enrichment:destabilization of exploitation ecosystems in ecological time[J].Science,1969,171:385-387.
[4]MAYNARDSJ.Models in ecology[M].Cambridge:Cambridge Univ Press,1974.
[5]陈兰荪,井竹君.捕食者-食饵相互作用微分方程的极限环存在性与唯一性[J].科学通报,1984,24(9):521-523.
[6]HSU S H,HUANG T W.Global stability for a class of predator-prey systems[J].SIAM J APPl Math,1995,55:763-783.
[7]贾建文,胡宝安.具Ⅱ类功能反应性的非自治捕食扩散系统的全局稳定性[J].Journal of Biomathematics,2000,15(4):434-442.
[8]范猛,王克.一类具有HollingⅡ型功能性反应的捕食食饵系统全局周期性解的存在性[J].数学物理学报,2001,21(4):492-497.
[9]郭丽娜.具有Holling机能反应的捕食-被捕食随机模型[D].武汉:华中科技大学,2013.
[10]华盈盈,杨志春.具有随机扰动和比率依赖的Holling型捕食食饵的正解存在性[J].重庆师范大学学报,2011(5):41-44.
[11]MAO X.Stochastic diferential equations and applications[M].Chichester:Horwood Publishing,1997.
(责任编辑:沈凤英)
A Stochastic Model on Predator-prey System of Two Species with Ratio and Time Delay Dependence
SUN Jie
(School of Applied Mathmatics,Nanjing Unversity of Finance & Economics,Nanjing 210046,China)
Abstract:A class of two species stochastic Lotka-Volterra predator-prey system is discussed.It shows that under a suitable hypothesis on the environmental noise,the stochastic Lotka-Volterra system has a unique global positive solution and this positive solution will be stochastically ultimately bounded.
Key words:stochastic Lotka-Volterra predator-prey system;ITO formula;stochastically ultimatically boundedness
作者简介:孙 杰(1990-), 男,江苏淮安人,硕士生,主要从事非线性分析与经济应用研究.
收稿日期:2015-11-21;修回日期:2015-12-22
DOI:10.16219/j.cnki.szxbzk.2016.01.012
中图分类号:O175
文献标志码:A
文章编号:1008-5475(2016)01-0054-04
引文格式:孙杰.一类基于比率与时滞依赖的捕食-食饵系统的随机模型[J].苏州市职业大学学报,2016,27(1):54-57,66.