基于STM32的四轴飞行器的研究与设计
2016-04-13金薇
金 薇
(苏州工业职业技术学院,江苏 苏州 215104)
基于STM32的四轴飞行器的研究与设计
金薇
(苏州工业职业技术学院,江苏 苏州 215104)
摘要:四轴飞行器是一种新型无人飞行器,其结构简单,有着卓越的飞行稳定性,具有广阔的应用领域及很强的实用价值。本设计以STM32为主控核心,控制算法采用PID控制,硬件设计包括主控单元、传感器模块、电机驱动模块、无线通讯模块及电源模块等。
关键词:四轴飞行器;STM32;PID控制
四轴飞行器属于旋翼式无人飞行器的一种,拥有四个对称十字交叉分布螺旋桨,机械结构简单,调整两对螺旋桨所产生的扭矩和升力大小可以控制飞行器的飞行姿态。四轴飞行器可以通过附加一些传感器达到控制自主飞行,也可以通过无线遥控技术人为控制飞行。与传统的单旋翼直升机相比,四轴飞行器更适合于航拍、线路巡检,数据采集、近地飞行、通信增强等任务,在军用与民用领域均有着广泛的应用前景。
1四轴飞行器的结构与原理
四轴飞行器的结构图如图1所示,主要由控制中心,螺旋桨和电机组成。
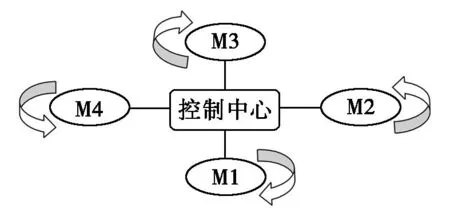
图1 四轴飞行器结构图
在飞行中M1与M3顺时针旋转,M2与M4逆时针旋转,即:相对的两个电机同向旋转,相邻的两个电机反向旋转。通过软件设计来控制四只螺旋桨的转速可以实现飞行姿态的变化[1]。
1) 高度控制。同时增加四只电机的转速,当螺旋桨产生的升力之和大于飞行器重力时,飞行器就会上升;相反,同时减小四只电机的转速飞行器就会下降;当螺旋桨产生的升力之和与飞行器重力相当时,飞行器即可在空中悬停。
2) 俯仰与滚转控制。俯仰动作是以飞行器头部与尾部为基准定义,滚转动作是相对于飞行器侧翼定义。增加电机M2转速的同时减小电机M3的转速,四轴飞行器就会沿M1与M4所在的轴向M3的方向旋转。当M1指向前进方向时,四轴处于滚转状态,当M2指向前进方向时,四轴处于俯仰状态。
3) 航向控制。当飞行器处于悬停状态,同时改变某一对角线两个电机转速,使两个电机所产生的扭矩数值不相等,电机产生的扭矩不能被完全抵消,飞行器会产生旋转动作。要想平稳地控制四轴飞行器的航向,就要同时调整四只电机的转速。若电机M1、M4逆时针旋转,电机M2、M3顺时针旋转,增大M2、M3转速的同时减小M1、M4的转速,根据转动惯量的原理,四轴飞行器就会逆时针旋转以保持惯性矩的平衡。反之,如果M1与M4的转速大于M2与M3的转速,四轴飞行器就会顺时针旋转。在飞行时就表现为四轴飞行器的航向发生了变化。
2硬件设计
本设计总体框图如图2所示,主要包括主控单元,传感器模块,电机驱动模块,无线通讯模块及电源模块等。

图2 总体框图
1) 主控单元。主控模块本设计选用了ARM公司推出的一款接口丰富,功能强大的STM32微控制器,主要功能是采集传感器数据,计算出飞行器的姿态信息、高度信息、位置信息等,接收遥控命令数据,将当前姿态与目标姿态进行比较,计算出各电机PWM脉冲占空比值控制电机驱动模块。
2) 传感器模块。采用IMU传感器测量飞行器在三维立体空间里的加速度与角速度,并通过这两个信号计算出飞行器的飞行姿态,测量数据经主控制器预算后,通过电机驱动模块控制各电机转速。
3) 电机驱动模块。电机驱动模块依据所选电机不同有所不同。无刷电机需单独设计电子调速器作为电机驱动模块,通常与主控制器模块分开设计;有刷电机可以直接采用普通三极管或MOS管元件组成,与主控制器模块集成一体[2]。
4) 无线通讯模块。无线通讯模块本设计选用WFT07 2.4 GHz无线遥控设备,包括WFT07无线遥控器和WFR07S无线接收机,无线数据通信选用了2.4 G无线通信模块E01-ML01DP3无线通信模块。本模块主要用来接收遥控器发送命令,经主控制器运算后,控制飞行器动作,同时也可向地面遥控器发送数据。为了更好地控制飞行姿态,无线通讯模块需具备至少4通道信号,分别控制飞行器升降、俯仰、翻滚及旋转。
5) 电源模块。电源模块为整个系统提供能量,本设计的电源模块采用11.1 V锂电池,给微控制器、无线通讯模块、传感器模块供电时采用LM2576-3.3的开关电源模块,将大容量锂电池的11.1 V电压转换到3.3 V;给电机驱动模块供电时采用LM2576-5.0的开关电源模块,将大容量锂电池的11.1 V电压转换到5 V。
3软件设计
本设计的四轴飞行器控制系统利用定时器中断形式,每1 ms采集传感器数据,每2 ms根据传感器数据分析姿态数据,并根据姿态信息发出控制信息。
具体的控制流程如下:首先读取传感器数据进行姿态计算,接收无线遥控模块的控制信号,解析指令后计算出要求的姿态和位置数据,然后通过飞行控制算法计算出所需的控制量,根据控制量调节PWM的占空比再经过电子调速器控制四个旋翼的转速,通过对转速的控制实现飞行器飞行姿态的控制[3]。
软件总体流程图如图3所示。系统初始化即在执行外部控制前,系统MCU内部进行系统时钟、各模块时钟、内部总线、外部总线、控制参数以及内部资源初始化等。在计算姿态程序设计过程中,采用定时器中断的形式,采样频率固定为1 000 Hz,即每1 ms读取一次传感器的数据,对采集到的原始数据做滑动平均滤波处理,滤波后将陀螺仪数据与加速度计数据进行融合,计算出姿态信息。
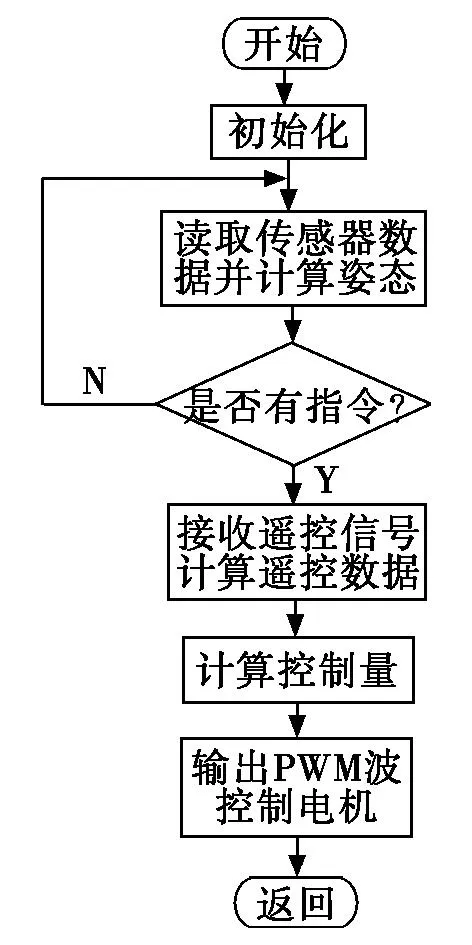
图3 软件总体流程图
4结束语
四轴飞行器与固定翼飞行器相比,具备升力大、稳定性好、动作灵活等优势,在军事领域如秘密地形探测、侦查、军事打击等;自然研究领域:对某些地域人类无法到达或者不适合人类活动的地方进行地形地质探测或环境监测;救援领域;通信领域都有着广泛的应用。
参考文献
[1]许震,毛丽民,刘同连,等.四轴飞行器控制系统设计[J].常熟理工学院学报(自然科学),2013(2):109-113.
[2]黄鹏宇,曾路荣,杨川,等.一种新型灾难救援四轴航拍飞行器设计[J].四川兵工学报,2014(6):124-128.
[3]丛吉,王立忠,宋扬,等.多功能探测安防智能四轴飞行器的研制[J].高师理科学刊,2014(1):41-43.
Research and Design of Four-axis Aircraft Based on STM32
Jin Wei
(SuzhouInstituteofIndustrialTechnology,SuzhouJiangsu215104,China)
Abstract:Four-axis aircraft is a new type of unmanned aerial vehicles, which has the advantages of simple structure, excellent flight stability. It has a broad field for application and a strong practical value. This design takes STM32 as the core of control, the control algorithm adopts PID control, the hardware mainly includes the main control unit, sensor module, motor driver module, wireless communication module and power module, etc.
Key words:four-axis aircraft; STM32; PID control
中图分类号:TP368.2
文献标识码:A
文章编号:1674- 4578(2016)01- 0092- 02
作者简介:金薇(1974- ),女,江苏吴江人,苏州工业职业技术学院电子与通信工程系,副教授,硕士,研究方向:应用电子技术。
收稿日期:2015-11-13
