机载Lidar点云精度检测及误差控制措施
2016-04-13谢春喜
谢春喜
(铁道第三勘察设计院集团有限公司,天津 300251)
机载Lidar点云精度检测及误差控制措施
谢春喜
(铁道第三勘察设计院集团有限公司,天津300251)
Accuracy Detection and Error Control Measure of Airborne Lidar Point Cloud
XIE Chunxi
摘要机载Lidar技术集成了激光、POS、计算机、航空摄影测量等多种技术,相对于传统航测技术,具有点云密度高、工作效率快、受天气影响程度小、数据精度高、成果丰富等特点。结合实际工程项目,应用检测装置进行机载Lidar点云精度检测,并总结出机载Lidar点云数据处理过程中的误差控制措施。
关键词点云检校GPS 测量精度检核误差来源
机载激光雷达系统是一种集全球导航系统、惯性导航系统与激光扫描仪于一体,用于获取三维信息的遥感系统。机载激光雷达技术作为一种信息获取的全新手段,是继GPS空间定位系统之后又一项测绘技术的新突破,被视为航天、航空领域中最具代表性的高新测绘技术之一[1,2]。机载激光扫描传感器发射的激光脉冲能部分地穿透树林遮挡,可直接获取真实地面的高精度三维地形信息。与其他遥感技术相比,该技术具有点云密度高、工作效率快、受天气影响程度小、数据精度高、成果丰富等特点,使其在地形测绘、铁路勘测、资源调查等领域具有独特的优势,机载Lidar已成为工程航测领域的新生代力量,而其精度将影响该技术大规模工程化应用的广度和深度。为此,精度检测和误差控制是进一步大规模深化应用前必须要做而且首先要做的基础性工作[3-5]。
1工作原理
机载Lidar系统的主要组成部分如图1所示[6-7]:①动态差分GPS 接收机,用于确定扫描投影中心的空间位置;②姿态测量装置,用于测量扫描装置主光轴的空间姿态参数;③激光扫描测距系统,用于测量传感器到地面点的距离;④成像装置(CCD相机),用于获取对应地面的彩色数码影像,制作正射影像或其他专题图。
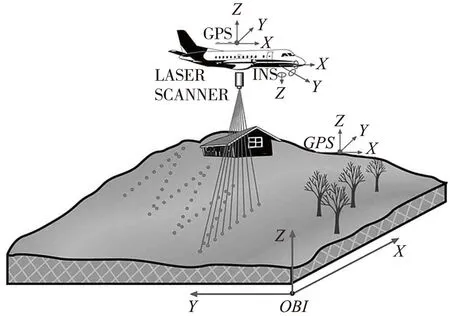
图1 机载Lidar主要组成部分和工作原理
航摄时,由差分全球定位系统确定传感器在空中的三维精确位置,由姿态测量装置(IMU)测定飞机的仰俯角、侧滚角和航向角,由激光测距仪直接测量地形起伏情况。其对地定位原理为[8]:
假设传感器在空中的投影中心G点的三维坐标(XG,YG,ZG)已知,传感器投影中心到待定点P(XP,YP,ZP)的矢量S可以精确测出,根据矢量求解原理,可以求出待定点P的三维坐标。


式中:b=cosω·sinα·cosκ+sinκ·sinω
传感器在空中的投影中心G点的三维坐标(XG,YG,ZG)由差分GPS 提供;传感器空中姿态参数(φ,ω,κ)由IMU提供,θ为激光测距点P对应的像元与扫描周期内中间像元(即所谓的机下点)之间的夹角,由激光扫描器给出。上述(X0,Y0,Z0,φ,ω,κ,θ,S)均为已知,即可求出任意待定点的三维坐标(Xi,Yi,Zi)。
2机载Lidar点云和影像精度检测
2.1机载Lidar点云平面精度检测
Lidar点云尽管有一定的密度,但相对于影像而言是离散的,因此不能用检测影像平面精度的方式检测点云平面精度[9]。由于点云均匀且盲目分布的特点,也不能像全站仪那样通过特定点来检测其平面精度。为此,通过直线拟和求交叉点的方法来检测点云平面精度。
黑龙江省哈尔滨某设定检测区,丘陵地形,植被覆盖率约70%,以3个相对航高总计飞行14条航线,其中相对航高1 350 m的4条,1 200 m的2条,600 m的8条,平均点间距0.45 m,点云密度5个点/m2。实验中用到了发明专利[10]—机载激光雷达点云平面精度检测装置和另一种自制的点云平面检测装置(如图2、图3所示)。

图2 点云平面精度检测装置

图3 点云平面精度检测自制装置
实际飞行航线和装置分布情况见图4、图5。
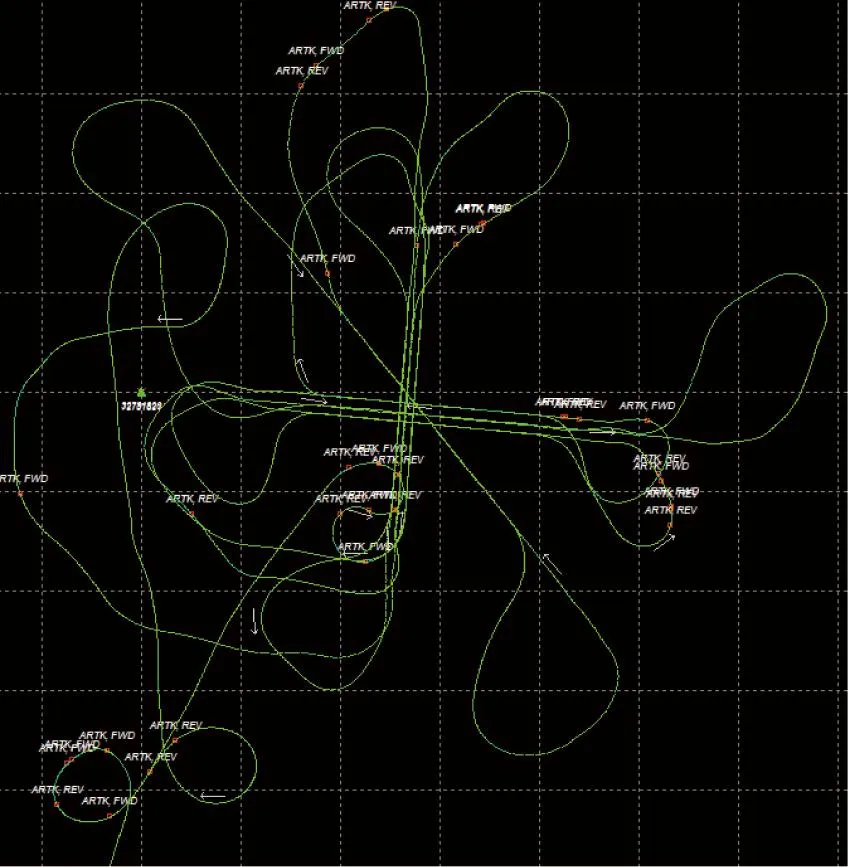
图4 数据获取航迹

图5 点云平面精度检测装置分布
首先,根据高程检测出打到装置上的点云,然后应用线性回归分析法拟和出反射天线,最后根据3条反射天线(检测装置)或两条反射天线(自制装置)计算交叉点坐标。
将拟和后求交叉点坐标与按照四等GPS实测的外业坐标成果进行比对,其差值统计如表1。
统计得出实测坐标与拟和坐标差值在X方向中误差为0.049 m,Y方向中误差为0.032 m。

表1 点云平面检测装置点云拟和坐标与GPS实测坐标差值 m
2.2机载Lidar点云高程精度检测
在测区布设9块材质相同的平板来检测点云高程精度,布设后平板的四角和中心的高差不超过5 mm(如图6)。

图6 点云高程精度检测装置
统计出落在每块平板上点云的高程均值,然后与四等水准测得的平板高程值进行比对,其差值统计如表2。

表2 点云高程检测装置点云高程与GPS实测高程差值 m
统计得出实测高程与Lidar高程差值中误差为0.041 m。
将检测区的点云根据高程控制点进行GeoID改正,在具有一定坡度呈“十”字交叉的两条公路上实测了60个高程点,将经过GeoID改正后的地面点云与实测路面高程点进行比对,其高程中误差为0.037 m。
2.3机载Lidar影像平面精度检测
在检测区范围内均匀布设了9个地面标志,应用无约束自由网平差和约束平差分别进行空三加密,然后与检查点进行精度检核。
(1)自由网平差
基于POS数据进行无约束空三加密,在影像上量测出的地面标志坐标与四等GPS实测的坐标进行比对,差值如表3。

表3 自由网平差后地面标志立体量测值与实测值差值 m
统计得出X方向中误差为0.196 m,Y方向中误差为0.124 m,Z方向中误差为0.151 m,Z方向的立体量测值比GPS实测值高出0.725 m。
(2)约束网平差
基于POS数据,采用4个控制点进行约束平差,在立体像对上量测出3个检核点坐标与四等GPS实测的坐标进行比对,差值如表4。

表4 约束网平差后地面标志立体量测值与实测值差值 m
统计得出X方向差值中误差为0.158 m,Y方向差值中误差为0.099 m,高程差值中误差为0.119 m,高程的立体量测值比水准实测值低0.013 m,相对于无约束平差而言,高程值与水准实测值更加接近、精度更高。因此,应在约束网平差后的立体像对上采集地形特征线和特征点,用于制作精细DEM成果。
2.4点云平面精度与影像平面精度对比
实验中在7个已知点上同时设置点云检测装置和影像检测标志,采用点云拟合反射天线求交叉点坐标得到已知点坐标,并且在约束网平差后的立体像对上量测已知点坐标,得到两套坐标及差值(如表5)。

表5 点云与影像平面精度对比 m
统计得出X方向差值中误差为0.096 m,Y方向差值中误差为0.144 m,表明点云平面精度较高,后续处理时应以点云数据为基准改正影像的平面位置,进而提高立体采集DLG和制作DOM的精度。
3机载Lidar误差控制措施
3.1POS解算
POS系统是机载激光探测与测距系统的关键,也是必备的部件,其核心思想是采用动态差分GPS技术和惯性测量装置直接在飞行中测定传感器的位置和姿态,并经严格的联合数据处理(即卡尔曼滤波),获得高精度的传感器外方位元素,从而实现无或极少地面控制的传感器定位和定向。
机载Lidar采用动态载波相位差分GPS系统,利用安装在Lidar上的动态GPS接收机,与设在一个或多个基准站的至少两台GPS信号接收机同步而连续地观测CPS卫星信号,同时记录瞬间激光和数码相机开启脉冲的时间标记,通过载波相位测量差分定位技术的离线数据后处理获取Lidar的三维坐标。由此可见,GPS信号强度对POS解算后得到的外方位元素成果精度至关重要。为此,在飞行前务必进行GPS星历预测,选择GPS星历好的时间段进行检校场数据获取,条件容许的话设置两个及以上地面基站,附件如有CORS站宜优先采用。采用POS解算软件进行解算时应根据数据质量分时段进行解算。
3.2Lidar检校
目前,Lidar检校有手工检校、基于特征面、基于特征线三种检校方式,基于特征线方式检校效率最高,并且对检校场的地形地貌条件要求相对较低。因此,一般采用基于特征线的Lidar检校方式。为了得到较好的检校精度应选择植被覆盖少、有一定地形起伏、硬质路面和尖顶房较多的区域作为检校场。检校时首先分条带进行点云滤波分类,分离出地面点和建筑物点,根据点云密度情况设置搜寻连接线的最佳参数(搜索范围,连接线长度,XY方向最大容许误差,Z方向最大容许误差等)。然后调整连接线,其中包括删除选定的连接线或者大于某一限差的连接线,同时可以增加地面线、断面线、已知线等,最后根据自动寻找的连接线和手动增加的连接线解算出检校参数。
3.3波动改正
Lidar检校消除了系统安置误差,对飞行过程中由于GPS信号问题可能会造成局部漂移误差所做的波动改正是提高机载Lidar数据精度的另一重要环节。
计算当前特征线相对于通过多航带数据得到的特征线平均位置改正量,航迹线解算后得到的每条航迹定位精度估计值在计算平均位置时将转换为权重因子,低精度条带上的特征线将获得更大的改正量,高精度条带上的特征线将获得更小的改正量。根据改正量拟和出改正曲线,然后对所有点云数据进行改正。处理时需要调整波动曲线的光滑度,光滑度与航迹定位精度估计值密切相关,当精度估计值低时采用更大的改正值。权重因子决定改正曲线的变化速率,权重因子愈小改正曲线愈光滑。连接线质量不太好并且可能包含异常值时应采用较小的权重因子,连接线质量较高时,应该采用较大的权重因子。
统计波动改正前后6条航线间共20个点处的接边差,见图7。

图7 平差前后接边差对比
可见,经过波动改正后航线间的接边差得到明显改善。
4结论
从点云平面装置检测实验得出的结果看, Lidar点云的平面精度与高程精度处于同级水平,只是由于Lidar点云的离散性才使得其平面精度受到点云间距的限制,为此可用影像弥补平面精度不足,加上激光雷达点云本身较高的高程精度,将在铁路勘测领域担当更加重要的角色,发挥更加重要的作用。
参考文献
[1]高文峰,王长进.铁路勘测中使用机载激光雷达测绘横断面相关问题的探讨[J].铁道勘察,2010(2)
[2]王长进.机载激光雷达铁路勘察技术[M].中国铁道出版社,2010
[3]韩改新. 机载激光雷达(Lidar)技术在铁路勘测设计中的应用探讨[J].铁道勘察,2008,34(3):1-4
[4]朱士才.Lidar的技术原理以及在测绘中的应用[J].现代测绘,2006,29(4)
[5]赖旭东,郑学东,万幼川.激光雷达技术在数字流域中的应用探讨[J].长江科学院学报,2005,22(5)
[6]李树楷.机载/车载激光扫描测距/成像制图系统的新进展[J].中国图像图形学报,1999,4(2):89-93
[7]廖丽琼.地面激光雷达的数据处理及其精度分析[J].四川测绘,2004,12:153-155
[8]尤红建.激光三维遥感数据处理及建筑物重建[M].北京:测绘出版社,2006
[9]铁道第三勘察设计院集团有限公司.机载激光雷达点云平面精度检测装置:2011 1 0357366.0[P].2011-05-16
[10]张小红.机载激光雷达测量技术理论与方法[M].武汉:武汉大学出版社,2007
中图分类号:P225.1
文献标识码:B
文章编号:1672-7479(2016)01-0019-04
作者简介:谢春喜(1983—),男,硕士,工程师。
收稿日期:2015-12-15
