限制手臂摆动对人体步行影响的生物力学研究
2016-04-13北京体育大学北京100084
北京体育大学,北京 100084
限制手臂摆动对人体步行影响的生物力学研究
The Effects of Arm Swing Restraint on Human Walking
北京体育大学,北京 100084
李秋捷,曲峰,万祥林
LI Qiujie,QU Feng,WAN Xianglin
摘要:目的:探讨手臂摆动对人体行走步态特征的影响,从而为无臂的仿人机器人以及假肢的设计提供理论支持。方法:选用10名青年男性大学生为受试者,以1.5±0.3m/s的速度完成手臂自然摆动和限制双臂摆动的行走运动,研究采用Kistler三维测力台、Motion红外高速运动捕捉系统同步采集受试者行走时动力学和运动学数据。结果:(1)限制摆臂会显著降低步行频率;(2)限制摆臂会显著增大步行时重心的上下摆动、减少骨盆的旋转角度;(3)踝关节的生物力学参数在两种不同运动状态下表现出显著性差异,不摆臂时踝关节屈伸角度增大、屈伸力矩增大、关节做功增大;同时,不摆臂会造成膝伸力矩显著性增大,做功增多;针对髋关节,不摆臂会造成髋关节的屈伸角度增大;(4)下肢各参数在两种走路模式上表现出高度的相关性。结论:步行中手臂自然摆动可以降低腿部的能量消耗,是节省能量的一种行走模式;摆臂与不摆臂两种行走状态下肢的运动模式在不同水平上高度一致。
关键词:步行;限制手臂摆动;生物力学分析;能量消耗
步行在人体日常生活中扮演了非常重要的角色,而人体的步行需要身体各个部分的相互配合,其中摆臂的作用不容忽视。正常的人体步行过程中,相关肢体和关节需要一个很高程度的稳定性和协调性,其中手臂的行为不是像钟摆一样自由摆动的,其摆动也是由多个肌群参与相互作用的结果[1-2]。但对于上肢病变的患者以及安装假肢的康复病人,他们的步行协调性受到了破坏,从而可能会增大跌倒、损伤的可能性。这就使步行中摆臂的研究在骨科疾病的诊断,临床疗效的评估,以及康复指导中发挥越来越重要的作用。
在人类步态的研究中,已做过一些关于手臂摆动和步态关系的研究。有研究表明,手臂摆动产生扭矩是躯干上段轴向旋转的主要贡献者,手臂摆动抑制胸廓轴向旋转,从而使身体弹簧样活动产生的势能驱动骨盆在水平方向上做旋转运动[3]。Murray等[4]研究发现随着速度的增加手臂摆动的幅度也逐渐增加,他们认为正常的手臂摆动有调节步行中身体重心垂直方向上移动的作用。Wannier[5]等人的研究也发现,作为人类行走中的一个附属功能,上肢的摆动频率、幅度的变化都会明显影响下肢肌肉的肌电反应。也有学者从能量消耗方面分析步行中手臂摆动的作用,但不同的学者实验结果差异较大,且采用的实验方法大多从气体代谢方面进行分析,针对运动学参数、动力学参数以及关节做功的研究的较少,对于骨盆的旋转、躯干的旋转、步幅、步频等参数的分析结果各有不同。
近年,涌现出大量的无臂仿真机器人,它们只有头、躯干和下肢,为了模仿人类对于平衡的稳定性控制,机器人在完成行走、站立及各种动作时都需要身体各部分复杂的配合,以代偿没有双臂摆动维持的平衡。在正常的双足步行过程中,矢状面的运动起主导作用,额状面和水平面的运动幅度相对较小,所以很多关于人体步态的研究集中在矢状面的屈伸活动上。
综上所述,人类步行中,手臂自然摆动在身体的姿势控制中扮演一个重要角色,那么步行中刻意改变手臂的运动将有可能影响基本的步态参数,并因此改变步态效率。本实验的目的旨在探讨限制手臂摆动对人体行走步态特征的影响,从而为无臂的仿真机器人以及假肢的设计提供理论支持。
1研究对象和方法
1.1研究对象
10名青年男性大学生(年龄23.8±1.9岁;身高175.7±2.4cm;体重64.7±6.4kg),且受试者身体健康状况良好,无运动系统疾病及其它严重疾患史或异常步态。实验前24h内未从事剧烈运动,无肌肉疲劳症状。
1.2数据采集与处理
受试者着泳裤,在身上贴上29个反光标志点(头顶点,头正中矢状面前/后点,左/右肩峰点,左/右肱骨外侧髁,左/右尺骨茎突与桡骨茎突连线中点,右侧肩胛骨偏移点,左/右髂前上棘,第四、五腰椎棘突中点,左/右大腿前侧,左/右股骨外侧髁,左/右股骨内侧髁,左/右胫骨粗隆,左/右腓骨外踝,左/右胫骨内踝,左/右足尖,左/右足跟、与足尖同高点)。通过三维测力台(Kistler 9281CA,Switzerland,1000Hz)、8镜头红外高速运动捕捉系统(Motion Analysis Raptor-4,USA,200Hz)同步采集动力学和运动学数据。受试者以限制手臂摆动和自由摆臂两种模式进行行走(如图1、2),开始时受试者距离测力台直线距离10m,使用便携式测速系统(Newtest Powertimer)将通过测力台的速度控制在1.5±0.3m/s,两个测速仪红外发射装置位于测力台一侧,间距3m。在规定速度下,受试者以正常步态、无任何步伐调整并以右脚着在台面上视为一次有效测试。经过三维测力台后两个步态周期,步行停止,每人每种步行模式记录3次有效数据,3次数据均用于最后的计算。

图1 自由摆臂行走测试现场
采集的所有标志点三维坐标采用Butterworth低通滤波进行平滑,截断频率为10Hz。根据标志点坐标建立肩部坐标系、骨盆坐标系、大腿坐标系、小腿坐标系、足坐标系,其中,髋关节中心根据Bell[7]的研究计算,膝关节转动中心为股骨内外侧髁中点,踝关节转动中心为内外踝中点;采用欧拉角的方法计算髋、膝、踝关节的三维角度;采用逆动力学[8]的方法计算三维净力矩。关节功率定义为关节净力矩与关节角速度的乘积。

图2 限制手臂摆动行走测试现场
数据通过Motion Analysis自带软件Cortex 2.1.0.1103以及Microsoft Office Excel 2007、 MATLAB R2009a等软件进行处理。
1.3统计分析
两种步行模式下采集的参数用配对T检验分析方法进行比较,以P<0.05作为差异显著性水平,P<0.01作为非常显著性水平,所有统计分析应用SPSS17.0软件完成。
2结果与分析讨论
2.1研究结果
2.1.1步频与步幅如表1所示,摆臂与不摆臂对步频的影响有显著性差异,且摆臂的平均步频要大于不摆臂的平均步频。在一个步态周期中,摆臂和不摆臂对步行的第一、二步在P<0.05水平上均没有差异,但步幅显示出增大的趋势。
表1受试者在两种行走模式下步频和步幅一览
Table 1The step length and frequency during walking with and without arm swing
注:*P<0.05代表摆臂与不摆臂相比有显著性差异。
2.1.2骨盆、躯干旋转如表2所示,摆臂与不摆臂对骨盆沿Z轴旋转的影响有显著性差异,且不摆臂比摆臂,骨盆旋转有减小的趋势。但对比两条件下躯干旋转,并没有显著性差异。
2.1.3重心的摆动如表3所示,摆臂与不摆臂对重心在水平面摆动幅度没有显著性影响。但是,摆臂与不摆臂对重心上下摆动的影响呈现非常显著的差异,且不摆臂会造成重心在垂直面上的更大摆动。
表2本实验受试者在两种行走模式下骨盆、躯干旋转一览
Table 2The rotation angles of pelvis and trunk during walking with and without arm swing

运动形式骨盆旋转(°)躯干旋转(°)摆臂17.1±4.910.1±3.2不摆臂11.8±4.011.3±5.9P值P<0.001**0.243
注:**P<0.01代表摆臂与不摆臂相比有非常显著性差异。
2.1.4下肢运动学、动力学参数摆臂和不摆臂两种步行模式踝关节参数在矢状面变化如表4所示,其中大部分指标表现出显著性差异。两种步行模式对角度最大值有非常显著性差异,且不摆臂会造成背屈显著性增大,而对角度最小值(趾屈)影响不大(P=0.052)。对力矩的最大值、最小值在P<0.05水平上均有显著性差异,且不摆臂会造成力矩的显著性增大。对功率最大值、最小值均有非常显著性差异,且不摆臂会造成功率显著性增加。踝关节做功表现出显著性差异,且不摆臂会造成踝关节做功增加。
表3本实验受试者在两种行走模式下标准化重心摆动幅度一览
Table 3The amplitude of swing of COM during walking with and without arm swing
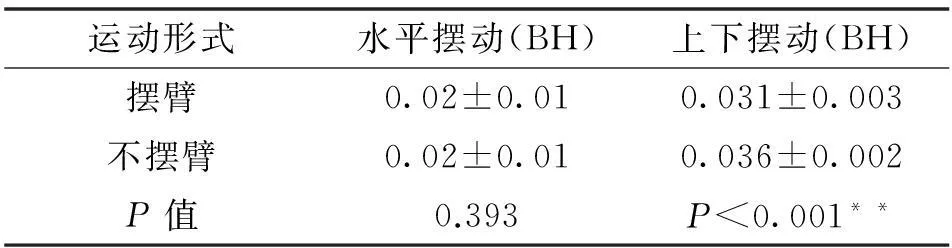
运动形式水平摆动(BH)上下摆动(BH)摆臂0.02±0.010.031±0.003不摆臂0.02±0.010.036±0.002P值0.393P<0.001**
注:**P<0.01代表摆臂与不摆臂相比有非常显著性差异。
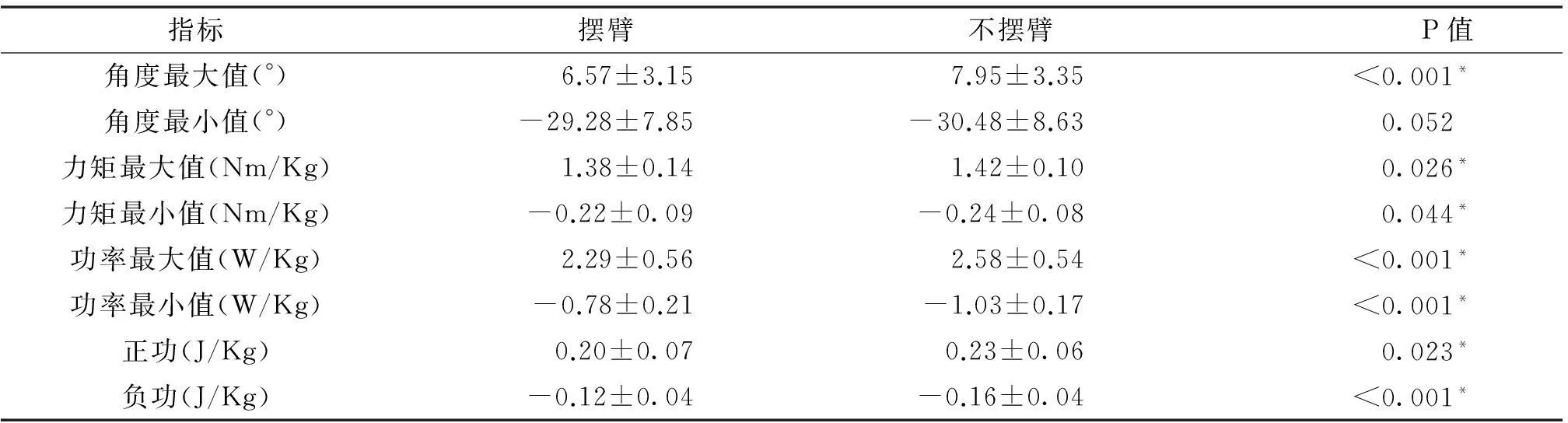
表4 摆臂与不摆臂行走时踝关节矢状面参数比较
注:*P<0.05代表摆臂与不摆臂相比有显著性差异。

图3 摆臂与不摆臂行走时踝关节矢状面
注:TO为脚离地,ST为脚着地。
Fig 3Sagittal plane angles, moments and powers for the ankle during walking with and without arm swing (TO = toe off, ST = foot strike)
摆臂和不摆臂两种步行模式膝关节参数在矢状面变化如表5所示。两种步行模式对膝关节屈角度最大值、最小值均没有显著性差异。对力矩的最大值有显著性差异(P<0.05),且不摆臂会造成力矩最大值(膝关节伸)的显著性增大,而对力矩最小值(膝关节屈)没有显著性影响。对功率最大值没有显著性影响,但不摆臂会造成功率最小值显著性增加。膝关节做功表现出显著性差异(P<0.05),且不摆臂会造成膝关节做功增加。
摆臂和不摆臂两种步行模式髋关节参数如表6所示。两种步行模式对角度最大值、最小值均有显著性差异(P<0.05),且不摆臂后角度最大值(髋关节伸)显著性增大,角度最小值(髋关节屈)减小。对膝关节力矩、功率、做功均没有显著性差异。
摆臂与不摆臂行走时下肢关节角度、力矩相关性系数如表7所示,大部分r值大于0.99,表现出高度的相关性。

表5 摆臂与不摆臂行走时膝关节矢状面参数比较
注:*P<0.05代表摆臂与不摆臂相比有显著性差异。

图4 摆臂与不摆臂行走时膝关节矢状面
注:TO为脚离地,ST为脚着地。
Fig 4Sagittal plane angles、moments and powers for the knee during walking with and without arm swing(TO = toe off, ST = foot strike)

图5 摆臂与不摆臂行走时髋关节矢状面
注:TO为脚离地,ST为脚着地。
Fig 5Sagittal plane joint angles、moments and powers for the hip during walking with and without arm swing(TO = toe off, ST = foot strike)

表6 摆臂与不摆臂行走时髋关节矢状面参数比较
注:*P<0.05代表摆臂与不摆臂相比有显著性差异。
3分析讨论
(1)摆臂对步幅和步频的影响。在本实验中,手臂束缚后,步频显著性减小,可见手臂摆动对步频有显著性影响,通过降低步频来维持身体的稳定性,步幅显现出增大的趋势,以维持特定的速度。Chapman[9]研究发现,限制手臂摆动后步行速度、步幅降低,步频增加,这与本实验的研究结果有所不同,分析其原因,可能是由于实验控制的条件不同,本实验控制受试者步行速度在1.5±0.3 m/s。步行速度的不同,必然会导致步幅和步频的差异。也有文献研究[10],在正常步态中手臂自然摆动,为了维持特定的速度,躯干附近的肌肉紧张,肌电放电增多,而本实验不摆臂的行走模式选用双手抱于胸前,所以,肌肉紧张导致的代偿也可能是致使步频、步幅发生变化的原因,但仍需通过研究进一步探讨。
表7摆臂与不摆臂行走时下肢关节角度、力矩相关性系数
Table 7The correlation of angles and moments forlower limbs between walking with and without arm swing
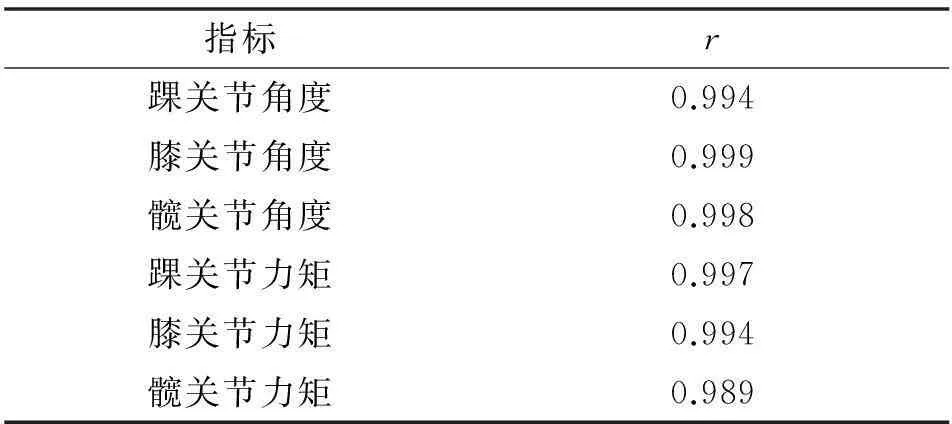
指标r踝关节角度0.994膝关节角度0.999髋关节角度0.998踝关节力矩0.997膝关节力矩0.994髋关节力矩0.989
(2)摆臂对骨盆、躯干旋转的影响。手臂束缚后,骨盆绕垂直轴旋转幅度减少,可见手臂摆动对骨盆旋转运动具有明显的影响。Cappozzo等[11]学者认为,上肢是身体上半部分角动量的主要贡献者,下肢是身体下半部分角动量的主要贡献者,身体上下两部分的角动量需要相互平衡以维持身体水平方向上旋转的平衡。由此推断,当手臂束缚后,身体上半部分的角动量随之明显减小,而下肢可能通过减少骨盆水平旋转幅度来减少身体下半部分角动量,与身体上半部分平衡。另外,手臂摆动抑制了胸廓的轴向旋转运动,使得躯干弹簧样活动产生的势能只能驱动骨盆水平面上的旋转运动。手臂束缚后,减少了对胸廓的抑制,从而减小了躯干产生的势能,降低了骨盆在水平面的旋转。有研究[12]表明,骨盆水平旋转幅度减小可能还与骨盆周围肌肉紧张度增加有关。
林晓聪[13]认为,手臂摆动带动了脊柱整体的旋转。本实验中,躯干角是肩关节运动时序与骨盆运动时序的差值,研究结果表明,两种步行对躯干旋转角度没有显著性差异,这可能是双手抱臂后,上肢及躯干肌肉紧张度增加导致的。
(3)摆臂对重心摆动的影响。从实验结果得知,不摆臂会增大身体重心的上下摆动,但对重心的左右摆动并没有显著性影响。分析实验结果,从下肢的运动学、动力学参数上得知,不摆臂会造成踝关节屈伸活动范围增大,踝关节和膝关节的力矩增大,这可能是致使重心上下产生波动的原因。另外,有研究发现,骨盆在水平面上的旋转是行走步态的首要决定因素,可以减少行走中身体重心在垂直面上的摆动幅度,使重心更趋于稳定。所以不摆臂后,骨盆旋转幅度减小也可能是重心上下摆动增多的原因。
(4)摆臂对下肢运动学、动力学参数的影响。从图3-5中以及表7得知,摆臂组和不摆臂组在下肢运动学、动力学参数上表现出高度的相关性,大部分r值超过0.90,曲线高度吻合,这说明两种行走状态,在不同水平上下肢运动模式高度一致。
在本研究结果中,两种走路模式对踝关节的影响最为显著,膝关节除力矩和功外均没有显著性差异,对髋关节各项参数并没有显著性影响。这与前人的研究结果有所不同,Brain[14]研究发现,两种步行模式对踝关节和髋关节并没有显著性差异。但不摆臂后膝关节屈伸力矩显著性增大,这与本研究结果一致。本实验得出不摆臂造成膝关节力矩、踝关节屈伸角度、踝力矩、踝关节做功及功率均增大。这说明摆臂会减少踝关节用力,减少踝关节和膝关节做功,维持身体平衡。
本实验的某些研究结果与前人的研究结果不同,可能的原因主要有以下两个方面:1.手臂束缚的方式不同,本研究采用的是双臂抱于胸前,而前人研究则选用绷带,使双臂被动束缚在躯干左右;2.实验中控制的步行速度不同,这可能导致步幅和步频的研究结果有所差异。
(5)摆臂对下肢能量消耗的影响。功被定义为功率对时间的积分,并用焦耳每千克体重来表示。当功为正值时,关节内部力矩和关节角速度的方向相同,表示肌肉的向心运动,能量被产生出来。当功为负值时,内部力矩与角速度相反,表示肌肉的离心运动,能量被吸收[15]。行走时负功主要使肢体在抵抗重力时吸收能量,正功使人体向前运动。不管是正功还是负功,肌肉收缩都要消耗能量,不摆臂行走时,踝关节和膝关节的正功和负功均大于摆臂行走,表明不摆臂行走时踝关节和膝关节附近的肌群需要消耗更多的能量。
Elftman[2]是首次提出步行中手臂自然摆动可以降低能量消耗的人。Ortega和Umberger[10]也通过实验证实,人为限制手臂摆动后行走时的能量消耗增加不到10%。后续有学者研究发现,摆臂可以降低人体垂直方向的角动量,地面反作用力的力矩随之减少,由于地面反作用力的力矩需要腿部肌肉产生,所以伴随着腿部肌肉能量消耗的减少[16]。Collins[17]研究认为手臂摆动可以抵消腿部的运动,减少垂直地面反作用力矩和动员的肌肉力量,从而减少能量消耗。本研究虽然只计算了下肢矢状面的变化,但不摆臂比摆臂踝关节和膝关节力矩均增大,伴随着腿部肌肉用力增多。由此可以说明,步行中摆臂可以降低腿部的能量消耗。
4研究结论与建议
4.1结论
(1)步行中手臂自然摆动可以降低腿部的能量消耗,是节省能量的一种行走模式。
(2)对比摆臂与不摆臂两种行走状态,在不同水平上下肢运动模式高度一致。
(3)限制手臂摆动会降低步行频率,增加步行时重心的上下起伏,同时会减小步行时骨盆的水平旋转角度,但对重心的左右摆动以及躯干的旋转角度影响并不显著。
4.2建议
摆臂是人体行走节省能量的重要因素,这就建议无臂的仿真机器人,在模仿人类行走时,应增大驱动力,满足步行中没有摆臂作用带来的更多能量消耗,同时应减少骨盆的旋转驱动,增大髋关节屈曲驱动和踝关节背屈驱动。在诊断上肢活动障碍和肩轴关节损伤的病人时,多关注病人下肢髋、膝、踝关节在屈伸角度上是否出现代偿,骨盆旋转是否正常,从而针对不同症状给予病人康复治疗。
参考文献
[1]Ballesteros M L, Buchthal F, Rosenfalck P.The PatternofMuscler Activity Duringthe Arm Swingof Natural Walking.[J].Acta Physiol Scand,1965, 63: 296-310.
[2]Elftman H.The Function of the Arms in Walking[J].Human Biology,1939, 11(4): 529-535.
[3]Baldissera F, Cavallari P.Neural Compensation for MechanicalLoading of the Hand during Coupled Oscillations of the Hand and Foot.[J].Exp Brain Res,2001, 139(1): 18-29.
[4]Murray M P, Sepic S B, Barnard E J.Patterns of Sagittal Rotation of the Upper Limbs in Walking[J].Phys Ther,1967, 47(4): 272-284.
[5]Wannier T, Bastiaanse C, Colombo G, et al.Arm to Leg Coordination in Humans during Walking, Creeping and Swimming Activities[J].Exp Brain Res.2001, 141(3): 375-379.
[6]伊强, 陈恳, 刘莉.小型仿人机器人THBIP-Ⅱ的研制与开发[J].机器人,2009(6): 586-593.
[7]Bell A L B R A P.Prediction of Hip Joint Centre Location from External Landmarks[J].Human Movement Science,1989, 8(1): 3-16.
[8]Frankel B B J P.The Forces and Moments in the Leg during Level Walking[J].J Appl Mech,1950, 72: 27.
[9]Chapman Wm R H.Effects of Immobilization of the Back and Arms on Energy Expenditure during Level Walking[J].Biomechanics Laboratory,1964.
[10]Umberger B R.Effects of Suppressing Arm Swing on Kinematics, Kinetics, and Energetics of Human Walking.[J].J Biomech,2008, 41(11): 2575-2580.
[11]Cappozzo A.The Forces and Couples in the Human Trunk during Level Walking[J].J Biomech,1983, 16(4): 265-277.
[12]梁勃威.正常骨盆步态及其相关肌肉活动的研究[D].福州:福建医科大学, 2013.
[13]林晓聪.手臂摆动对行走时躯干运动协调性的影响[D].福州:福建医科大学, 2010.
[14]Umberger B R.Effects of Suppressing Arm Swing on Kinematics, Kinetics, and Energetics of Human Walking[J].J Biomech,2008, 41(11): 2575-2580.
[15]Sutherland D H, Cooper L, Daniel D.The Role of the Ankle Plantar Flexors in Normal Walking[J].J Bone Joint Surg Am,1980, 62(3): 354-363.
[16]Meyns P, Bruijn S M, Duysens J.The How and Why of Arm Swing during Human Walking.[J].Gait Posture,2013, 38(4): 555-562.
[17]Collins S H, Adamczyk P G, Kuo A D.Dynamic Arm Swinging in Human Walking[J].Proc Biol Sci.2009, 276(1673): 3679-3688.
Abstract
Objective: This study explores the effects of arm wing restraint on walking patterns so as to provide theoretical support for the design of no-arm human-simulation robots and prosthetic devices. Methods: Choosing ten young male students as subjects and asking them to walk at the speed of 1.5+-0.3m/s while swinging their arms naturally and walking with their arms restrained respectively. Using Kistler’s 3D force platform and the infrared high-speed motion capture system to collect subjects’ kinetic and kinematic data. Results: (1) Arms swing restraint will significantly reduce the walking frequency; (2) arm swing restraint will dramatically increase the vertical range of gravity movement and the rotary angle of pelvis; (3) under the two different motion conditions, biomechanic parameters present significant differentiation; (4) under the two walking patterns, lower limb parameters are highly correlated (r>0,90) . Conclusion: Arm swing during walking will reduce legs’ energy consumption. Therefore it is a kind of energy-saving walking pattern. The motion pattern of lower limbs under the two walking conditions is highly identical.
Key words:Walking; Arm Swing Restraint; Biomechanic Analysis; Energy Consumption
CLC number:G804.6Document code:AArticle ID:1001-9154(2016)01-0103-06
(编辑孙君志)
中图分类号:G804.6
文献标志码:A
文章编号:1001-9154(2016)01-0103-06
收稿日期:2014-12-26
作者简介:李秋捷,在读硕士研究生,研究方向:运动生物力学,E-mail:lqj19921015@sina.com。通讯作者:曲峰。
基金项目:2013年国家高科技研究发展计划(863计划)。
Beijing Sport University, Beijing 100084
