电动助力转向电机补偿控制方法
2016-04-12Themotorcompensationcontrolforelectricpowersteeringsystem
The motor compensation control for electric power steering system
李绍松1,2,牛加飞1,盛 任1,于志新1,涂永发1
(1. 长春工业大学 机电工程学院,长春 130012;2.长春工业大学 汽车工程研究院,长春 130012)
LI Shao-song1,2, NIU Jia-fei1, SHENG Ren1, YU Zhi-xin1, TU Yong-fa1
电动助力转向电机补偿控制方法
The motor compensation control for electric power steering system
李绍松1,2,牛加飞1,盛任1,于志新1,涂永发1
(1. 长春工业大学 机电工程学院,长春 130012;2.长春工业大学 汽车工程研究院,长春 130012)
LI Shao-song1,2,NIU Jia-fei1,SHENG Ren1,YU Zhi-xin1,TU Yong-fa1
摘要:搭建电动助力转向(Electric Power Steering,EPS)硬件在环试验平台,基于最小二乘法辨识电机电参数。传统基于转速符号函数或饱和函数的摩擦补偿控制方法,只有在相对转动时补偿系统的动摩擦转矩,为此提出一种动静摩擦共同补偿控制方法。此外,基于电机角加速度进行惯量补偿控制,改善EPS系统惯量对手力的影响;基于电机角速度进行阻尼补偿控制,改善汽车回正性能。
关键词:电动助力转向;硬件在环试验平台;电机参数辨识;电机补偿控制
0 引言
作为电子技术与转向系统相结合的产物,EPS系统紧扣汽车工业发展大主题[1],在提供助力、减轻驾驶员操纵负担的同时,也能够提高汽车转向性能,以其优越的性能和特点有逐步替代液压助力转向趋势,具有广阔的应用前景[2]。
EPS根据车速信号和转向盘转矩信号确定电机目标控制电流,通过PID控制方法消除电机实际电流与目标电流的偏差,控制电机产生助力[3]。EPS电机惯量、阻尼补偿控制分别基于电机角加速度、角速度信号确定补偿控制电流,对EPS基本助力控制电流进行修正,降低EPS电机及减速机构的惯量、阻尼对转向性能的影响[4,5]。EPS电机摩擦补偿控制主要基于转速的符号函数或饱和函数来实现[6],施加的摩擦补偿转矩只有在电机转动时才能融入系统控制中,补偿系统的动摩擦转矩,不能补偿系统的静摩擦力矩。
本文搭建EPS硬件在环试验平台,基于最小二乘法辨识电机电参数,基于电机角加速度、角速度信号施加惯量、阻尼补偿控制。提出种动静摩擦转矩共同补偿控制方法,使摩擦补偿转矩在转向盘转动与停止之间实现平滑过渡。
1 电动助力转向硬件在环试验平台
基于dSPACE实时仿真系统搭建EPS硬件在环试验平台,如图1所示。试验平台硬件系统包括:转向系统操纵机构、电动伺服缸、各种传感器等。软件系统包括:dSPACE实时仿真系统接口软件、整车动力学模型、EPS控制系统模型等。
转向操作时,装有整车模型的DS1103系统采集转向盘转矩、转角等传感器信号,控制电动伺服缸驱动器,模拟转向阻力。装有EPS控制系统模型的MicroAutoBoxII采集转向盘转角、转矩、电机电流等信号,控制助力电机驱动器,实现转向助力功能。
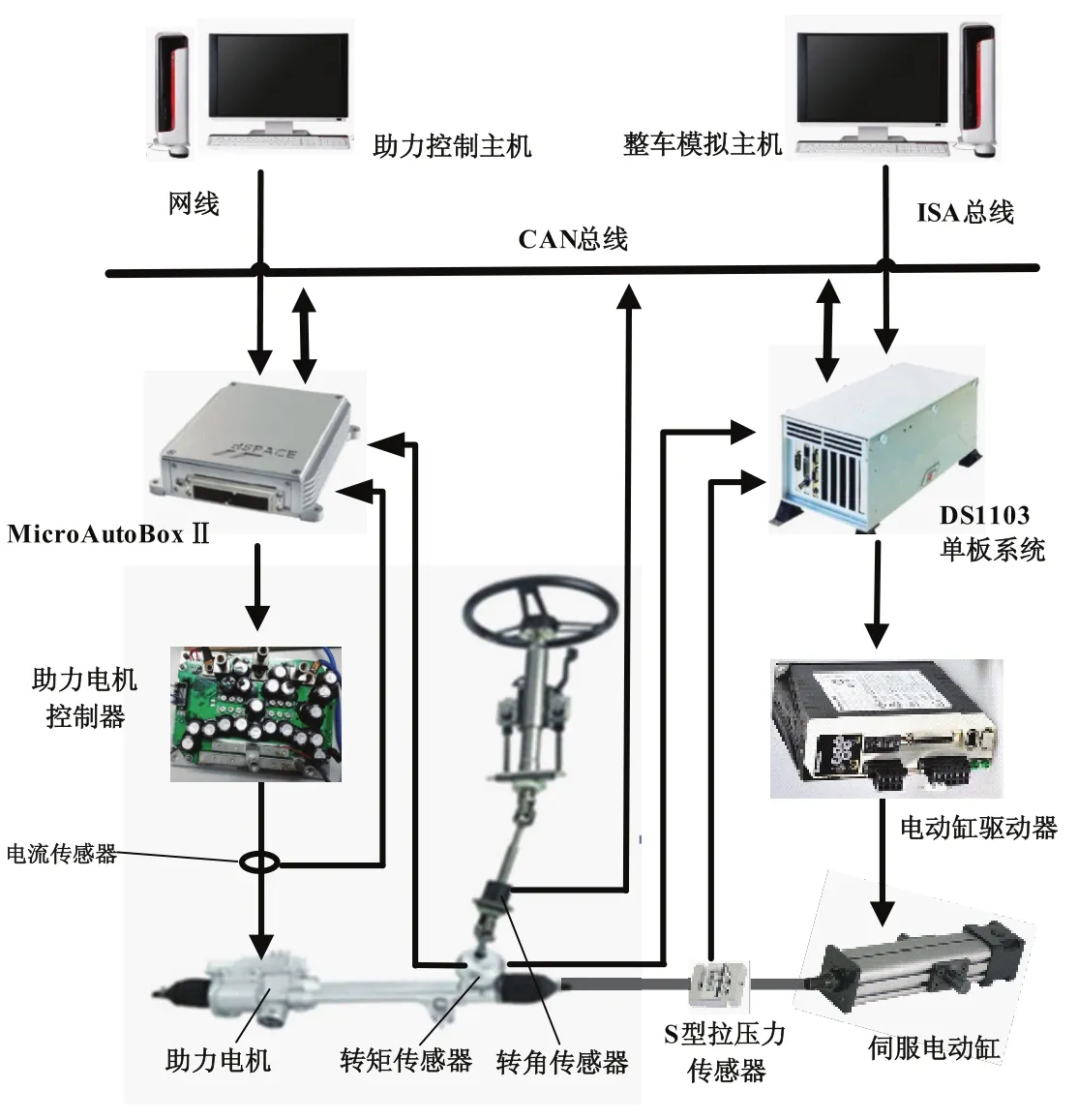
图1 电动助力转向硬件在环试验平台
2 电机电参数辨识
EPS增加了电机及减速机构,增加了系统惯量、阻尼和摩擦,可通过电机惯量、阻尼及摩擦补偿控制降低其对EPS汽车转向性能的影响。准确获取电机电参数,利于仿真平台中设计的控制器在实车上的应用,缩短EPS开发周期。
结合最小二乘法和直流电机模型,理论上可以对电机的所有电参数进行辨识[7]。考虑到电机的电枢电压、电流由传感器测得,转速可以由转向柱转角换算得到。因此,采用电机电压平衡方程作为电机参数辨识的模型基础,写成如下形式:

式中:gc为蜗轮蜗杆减速器速比;为助力电机角速度;u为电机的电枢电压;k为电机反电动势系数;L为电机电枢电感;R电机电枢等效电阻;i为电机电枢电流。


那么:

1)EPS硬件在环试验平台上,助力电机驱动器以80%占空比驱动转向盘右转5s,同时逐渐增加转向阻力;
2)以同样的占空比反向驱动转向盘左转,其余条件与步骤1)致;重复步骤1)和2),各实验3次。电机电参数辨识结果如表1所示。
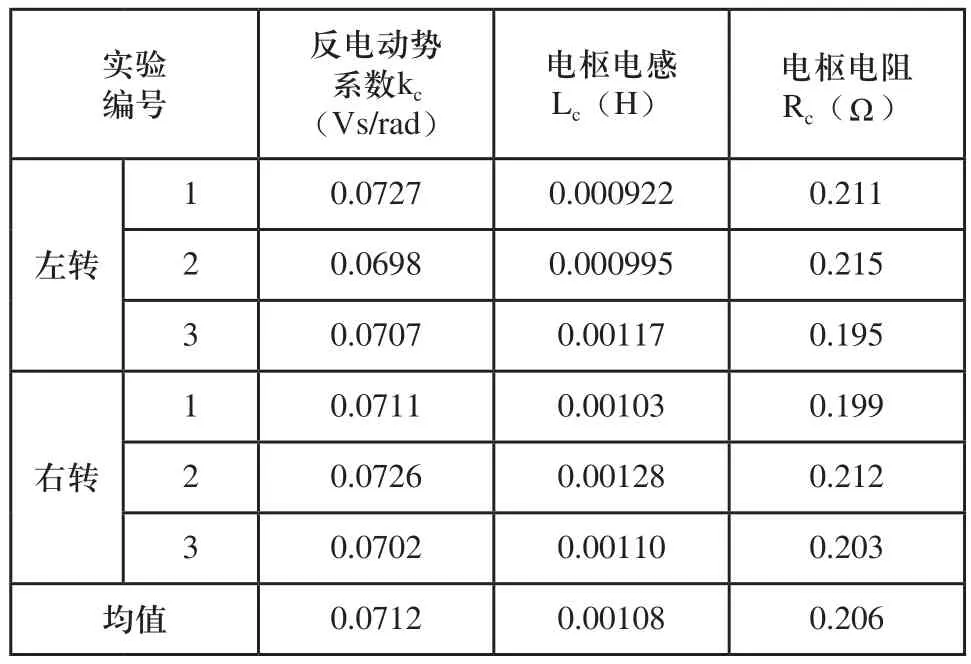
表1 EPS电机参数辨识结果
3 EPS电机补偿控制
3.1EPS电机摩擦补偿控制
多数研究中,对于模型或实际系统控制的摩擦通过转速的符号函数或饱和函数表示,如图2所示。

图2 基于符号函数与饱和函数的摩擦补偿控制
施加的补偿转矩只有在相对转动时才能融入系统控制中,补偿系统的动摩擦转矩,而对于仅有相对转动趋势时的静摩擦力矩则没有作用。因此,本文采用种能够实现动静摩擦转矩共同补偿的摩擦控制方法:

为了考察转向过程中动静摩擦的过渡过程,在没有摩擦补偿情况下,通过助力电机的电流开环控制,获得转向盘的运动过程。转向盘换向过程中,动静摩擦补偿的过渡过程如图4所示,补偿转矩Tfc如图中实线所示,通过调整系数,可以使摩擦补偿转矩在转向盘模块转动与停止之间通过静摩擦转矩的补偿实现平滑的过渡。

图3 动静摩擦补偿变化曲线
3.2EPS电机惯量补偿控制
EPS电机本身的转动惯量并不大,但是等效到小齿轮轴上后,其数值被放大了倍,过大的转动惯量会影响瞬态转向时驾驶员的手力和高速时车辆的回正稳定性[8]。可以对助力电机施加惯量补偿控制转矩:

其中,KJP为惯量补偿控制系数。基于EPS硬件在环试验台,进行转向盘90deg的角阶跃试验,有无惯量补偿控制的转向盘转矩对比曲线如图4所示。可以看出,施加惯量补偿控制后,转向盘力矩峰值降低了38%,善了EPS系统惯量对手力的影响。
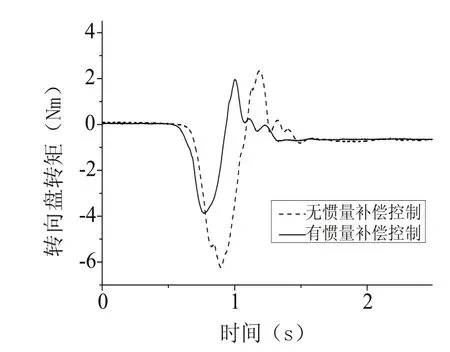
图4 转向盘转矩对比曲线
3.3EPS电机阻尼补偿控制
EPS增加电机及减速机构,增加了EPS系统的等效阻尼,降低了汽车的回正性能。可以对助力电机施加阻尼补偿控制:

其中,KCp为阻尼补偿控制系数。基于EPS硬件在环试验台,进行汽车回正试验,转向盘转角对比曲线如图5所示。看以看出施加阻尼补偿控制后,撒手回正时方向盘残留角度降低了20deg左右,有效善EPS汽车的回正性能。

图5 转向盘转角对比曲线
4 结束语
1)搭建EPS硬件在环试验平台,基于最小二乘法辨识电机反电动势系数、电枢电感和电枢电阻个电参数。
3)基于电机角加速度、角速度进行EPS电机惯量、阻尼补偿控制,善系统惯量、阻尼对转向性能的影响。
参考文献:
[1] Aijun Hu. Development of the Automobile Steering System[J]. Applied Mechanics and Materials,2011,42:272-275.
[2] Baharom, Masri B.; Hussain, Khalid, et al. Design of full electric power steering with enhanced performance over that of hydraulic power-assisted steering[J].Proceedings of the Institution of Mechanical Engineers,2013,227(3):390-399.
[3] Xiang Chen, Tiebao Yang, Xiaoqun Chen, et al. A Generic Model-Based Advanced Control of Electric Power-Assisted Steering Systems[J].IEEE TRANSA- CTIONS ON CONTROL SYSTEMS TECHNOLOGY,2008,16(6):1289-1300.
[4] 孟涛,余卓平,陈慧,等.电动助力转向控制策略研究及实验验证[J].汽车技术,2005(5):26-30.
[5] Yangling Cao,Shusong Yang. Study on Assistance Torque Control Strategyof Electric Power Steering System[C].Electric Information and Control Engineering (ICEICE),2011:5372-5374.
[6] 周金柱,段宝岩,黄进.LuGre摩擦模型对伺服系统的影响与补偿[J].控制理论与应用,2008,25(6):990-994.
[7] Samer S. Saab and Raed Abi Kaed-Bey. Parameter Identification of a DC Motor: An Experimental Approach[C].The 8th IEEE International Conference on Electronics, Circuits and Systems, 2001,2:981-984.
[8] 贝尔恩德.海森英,汉斯于尔根布兰德尔(编),石晓明,陈祯福(译).汽车行驶动力学性能的主观评价[M].北京:人民交通出版社,2010.
作者简介:李绍松(1986 -),男,山东菏泽人,讲师,博士,研究方向为汽车动力学仿真与控制。
基金项目:省级项目:吉林省教育厅“十二五”科学技术研究项目(吉教科合字[2015]第116号)
收稿日期:2015-11-06
中图分类号:U467.3
文献标识码:B
文章编号:1009-0134(2016)03-0082-03