一种改进的端头设站三角高程上桥测量方法
2016-04-11杨雪峰刘成龙王利朋
杨雪峰,刘成龙,王利朋
(西南交通大学 地球科学与环境工程学院,四川 成都 610031)
一种改进的端头设站三角高程上桥测量方法
杨雪峰,刘成龙,王利朋
(西南交通大学 地球科学与环境工程学院,四川 成都 610031)
摘要:针对高铁桥梁距离地面较高,CPIII高程网的起闭水准基点需要联测上桥的实际问题,首先介绍《高速铁路工程测量规范》中传统的中间设站光电测距三角高程测量方法,并指出该方法在工程实践中存在不足之处,然后提出一种改进的端头设站光电测距三角高程上桥测量方法,最后通过理论与试验验证,证明该方法是可行的,并且能够显著提高外业作业效率,可以为改进中间设站光电测距三角高程测量方法以及完善《高速铁路工程测量规范》提供参考。
关键词:高速铁路;轨道控制网;三角高程;设站;精度
1概述
2008年8月1日,我国第一条具有世界一流水平、最高运营时速达350 km的高速铁路京津城际铁路正式通车运营[1];2010年9月28日,沪杭客运专线以416.6 km/h的试运行速度创造历史,令世界震惊[2];2个月后的12月3日,新一代高速动车组“CRH380A”在京沪高铁跑出486.1 km/h的速度,我国高铁再次刷新世界铁路运营试验的最高速度[2]。目前,我国正在《中长期铁路网规划》目标指引下,掀起世界高速铁路大发展的新篇章[3]。
无砟轨道具有整体性强、稳定性好以及维修量少的特点[4],能够保证列车在轨道上以高速运行时仍可以保持良好的平顺性。同时,由于无砟轨道铺设工艺复杂,施工精度要求控制在毫米级范围内,一旦建成后将很难进行调整,因此,高精度的测量保障显得尤为重要。轨道控制网(CPIII)是其中的关键,它是沿线路布设且平面和高程共点的三维控制网,CPIII平面网起闭于基础平面控制网(CPI)或线路平面控制网(CPII),CPIII高程网起闭于线路水准基点,轨道控制网一般在线下工程施工完成后进行施测,是轨道铺设和运营维护的基准[5]。现今为了减少对铁路沿线的干扰,高速铁路多以架桥为主,但CPIII高程网起闭的水准基点却在桥下线路两侧,需要将线下水准基点的高程传递到桥上。
针对高程联测上桥的问题,本文首先介绍《高速铁路工程测量规范》中传统的中间设站光电测距三角高程测量方法[6],并指出该方法在工程实践中所遇到的实际问题,针对实际问题,提出一种改进的端头设站光电测距三角高程上桥测量方法,通过理论与试验验证,证明该方法是可行的,并且能够显著提高外业作业效率,可为改进中间设站的光电测距三角高程测量方法以及完善《高速铁路工程测量规范》提供参考。
2改进的端头设站光电测距三角高程上桥测量方法
2.1三角高程测量原理
如图1所示,从A点观测B点,A′为仪器中心,B′为棱镜中心,观测竖直角为αAB,斜距为SAB,仪器高AA′为iA,棱镜高BB′为νB,γAB为在A点观测时的垂直折光角,
H′H=D2/2R.
H′H为地球曲率对高差的影响,D为AB间的水平距离,R为地球的曲率半径,则B点到A点的高差为[7-8]
(1)
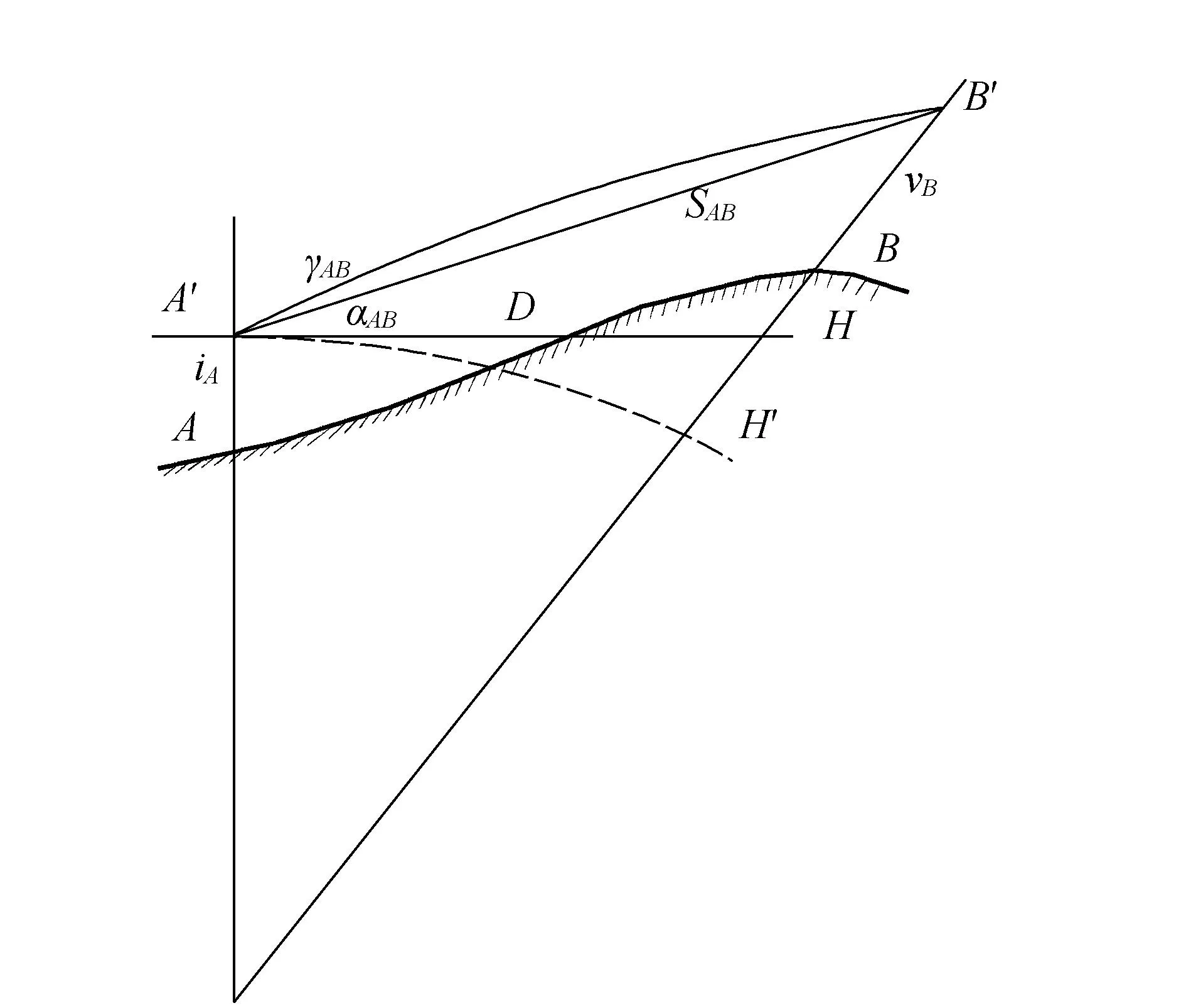
图1 三角高程测量原理示意图
其中,除由全站仪测量斜距SAB及竖直角αAB外,还需要精确的量测仪器高和棱镜高,而在三角高程作业中要将仪器高和棱镜高精确量测到误差不超过0.5 mm是极其困难的。因此,需采用中间设站的光电测距三角高程测量方法,使得在一个测段的三角高程高差测量中各测站的仪器高和棱镜高能够相互抵消,可以实现三角高程测量的高精度作业。
2.2传统的中间设站光电测距三角高程测量方法
在量测仪器高且棱镜高设为相等的前提下,使用中间设站三角高程测量方法求出点A和点B的高差,如图2所示。

图2 不量测仪器高和棱镜高的中间设站三角高程测量原理
分别得出I点到A点和B点的高差hIA,hIB:
(2)
(3)
若要得到点A到点B的高差,则
(4)
考虑到仪器高iI不变,且νA=νB,γa≈γb,Sacosαa≈Sbcosαb(I点到A点和B点的平距近似相等),把式(2)、式(3)代入式(4)得
(5)
通过式(5)可算出AB两点的高差,理论上是可行的,但是在实际的操作中存在以下几个问题:
1)《高速铁路工程测量规范》中要求I点到B点的竖直角不宜过大,为此需要拉长I点到B点的距离,要求I点到A点的距离相应地拉长,而高速铁路沿线路两侧适宜这样的环境太少,线路两侧无论是征地距离或植被均严重影响了线下水准基点高程的联测上桥;
2)仪器在I点测量A点和B点时的垂直折光角γa,γb近似相等,且近似效果与测量方向有关,测量方向不一样,光线影响就不一样,近似相等的程度就不一样;
3)《高速铁路工程测量规范》中要求前后视必须是同一个棱镜且观测时棱镜高度不变,而对于现场(特别是运营后的铁路现场)而言,没有上桥便道,同一个棱镜在桥上桥下反复拆卸、安装不便,增加测量难度,而且无法使用智能型全站仪进行全自动测量,大大降低测量效率,同时时间的跨度过大导致垂直折光角一直在变化,这也增加了测量误差。
针对以上三个问题,本文提出了一种改进的端头设站三角高程上桥测量方法。
2.3改进的端头设站光电测距三角高程上桥测量方法
如图3所示为改进的三角高程上桥测量方法,其改进的地方有以下几方面:

图3 改进的三角高程上桥测量原理
1)把中间设站变为端头设站,即把B点水准联测到桥下某个固定位置处,这样I点到A点和B点的平距是相等的,按式(5)仍然可以计算出AB间的高差,此次改动可降低上桥测量过程中对场地的要求;
2)在A,B两处均使用精密加工可整平的定长棱镜组件(如图4所示,5号点为A点或者B点,1
号点所示盘面具有整平气泡),则A,B两处的棱镜高度相等νA=νB=L1+L2,这样既解决了棱镜组反复上下桥的问题,也可以使用全自动外业采集软件进行自动测量,大大提高测量效率,节约测量时间,保证测量A点和B点时垂直折光角γa≈γb的精度。

图4 改进的可整平定长棱镜组件
3试验验证
为验证改进的端头设站光电测距三角高程上桥测量方法的可行性及其精度,特在某客运专线上桥测量中进行试验。选择两个上桥位置,且均为距离路基段较近的地方,这样便于进行水准测量验证,实验中采取三种测量方法,传统的中间设站光电测距三角高程测量方法,改进的端头设站光电测距三角高程测量方法和二等水准测量,三角高程测量外业技术指标按照规范进行,其外业观测技术要求如表1所示。
经过三种方法的高差测量后,其测量结果以及耗时统计如表2所示。

表1 中间设站三角高程测量外业观测技术要求[6]

表2 三种方法测量高差与耗时统计表
从表2可以看出,采用三种方法均可以进行高程上桥测量,即均可得到桥下高程点与桥上高程点之间的高差,上桥位置1三种方法的最大差异为0.71 mm,上桥位置2三种方法的最大差异为0.76 mm,说明改进的端头设站光电测距三角高程测量方法是可行的。
从表2的上桥位置耗时来看,改进的端头设站光电测距三角高程测量方法的上桥效率明显高于其他方法,因为该方法采用了一对可整平的定长棱镜组件,这样就可以利用智能型全站仪进行全自动外业数据采集,因此耗时最短;而二等水准测量需要绕行,同时需要进行往返测量,所以耗时最长;传统的中间设站光电测距三角高程测量方法需要将棱镜组件在桥上桥下之间反复拆卸、安装,耗时较长,虽然总耗时比二等水准短,但是长于改进的端头设站光电测距三角高程测量方法。
从整体试验结果来看,将改进的端头设站光电测距三角高程测量方法应用于高速铁路高程上桥测量是可行的,由于该方法采用了可整平的定长棱镜组件,因此可以进行全自动外业数据采集,为外业测量限差的实时控制提供可能,同时很大程度上提高外业作业效率。
4结束语
针对《高速铁路工程测量规范》中间设站光电测距三角高程测量方法所存在的一些不足之处,本文介绍传统的方法,在传统方法的基础上进行改进,并从理论和试验两方面验证改进的端头设站光电测距三角高程测量方法是可行的,其特点主要有几方面:
1)采用端头设站光电测距三角高程测量方法可以一定程度上解决线路沿线的场地局限所引起的施测困难问题;
2)采用端头设站光电测距三角高程测量方法可以进一步减少γa,γb近似相等所导致的精度损失,减小二者近似相等所带来的误差;
3)在该方法的施测过程中引入了一对可整平的定长棱镜组件,解决采用同一棱镜组件需要反复上下桥的问题,而且便于引入全自动采集软件,为外业测量限差的实时控制提供条件,同时降低作业人员的劳动强度,提高工程实践的作业效率。
综上所述,采用改进的端头设站光电测距三角高程测量方法不管是在理论上还是在工程实践中均是可行的,并且能够显著提高作业效率,可以为改进中间设站的光电测距三角高程测量方法以及完善《高速铁路工程测量规范》提供参考。
参考文献:
[1]何宣.京津城际铁路开题[J].广东交通,2008(8):53.
[2]李书亮.高速铁路轨道基准网测量及其数据处理方法的研究[D].成都:西南交通大学,2011.
[3]魏宗燕.从京津城际铁路看未来——解读《中长期铁路网规划(2008调整)》[J].铁道知识,2009(4):14-17.
[4]朱颖.客运专线无砟轨道铁路工程测量技术[M].北京:中国铁道出版社,2009.
[5]刘成龙,杨友涛,徐小左.高速铁路CPⅢ交会网必要测量精度的仿真计算[J].西南交通大学学报,2008(6):718-723.
[6]中华人民共和国铁道部.TB 10601-2009高速铁路工程测量规范[S].北京:中国铁道出版社,2009.
[7]刘成龙,杨雪峰,张阅川,等.基于测量机器人的二等高程控制测量新方法[J].西南交通大学学报,2013,48(1):69-74.
[8]孔祥元.控制测量学[M].武汉:武汉大学出版社,2002.
[9]张正禄,邓勇,罗长林,等.精密三角高程代替一等水准测量的研究[J].武汉大学学报(信息科学版),2006,01.
[10] 辛立国,安晓梅.应用全站仪进行淹没面积三角高程测量[J].测绘工程,2006,15(3):46-47.
[11] 张艳,高飞,李晓莉.应用精密三角高程测量实现跨河水准的研究[J].合肥工业大学学报(自然科学版),2007(10):1345-1348.
[12] 马山松.GNSS与三角高程在公路跨河中的应用分析.[J].测绘与空间地理信息,2014,37(8):179-180.
[13] 杨晓明,杨帆,宋玮,等.中间法电磁波测距三角高程代替精密水准测量的研究[J].测绘科学,2012(2):36-36.
[14] 罗涛,董岚,王铜,等.三角高程测量及对向观测法的回归分析[J].测绘工程,2012,22(6):13-15,21.
[15] 付建斌,刘成龙,卢建康,等.基于自由测站的高速铁路CPⅢ高程控制网建网方法研究[J].铁道工程学报,2010(11):32-38.
[16] 郑德华.精密测距三角高程精度分析及高程混合网定权[J].同济大学学报(自然科学版),2004(4):507-512.
[17] 邓兴升,贾莎莎,王文慧.带参数GPS水准拟合实现跨河高程传递[J].测绘工程,2011,20(4):1-4,8.
[18] 章书寿,饶国和,黄腾.精密三角高程测量精度的研究[J].测绘通报,1991(4):35-36.
[责任编辑:李铭娜]
An improved rigonometric leveling method to bridges by setting spot at the ends
YANG Xuefeng,LIU Chenglong,WANG Lipeng
(School of Geosciences and Environmental Engineering,Southwest Jiaotong University,Chengdu 610031,China)
Abstract:In consideration of the longer distance from ground to the bridge of high-speed railway,the standard of CPIII elevation network should be connected with leveling standard points.First,the traditional method in specifications is introduced for survey engineering of high speed railway,which named a method of trigonometric leveling setting spot in the middle.Then,the shortcomings of the method in engineering practice are pointed out and put forward an improved rigonometric leveling method to the bridge by setting spot at the ends.Finally,it is proved the new method is practicable of both theory and experiment,and it can enhance the work efficiency obviously.The new method can be beneficial to the modification of traditional method and specifications for survey engineering of high speed railway.
Key words:high-speed railway;track control network;trigonometric leveling;setting spot;accuracy
中图分类号:P224
文献标识码:A
文章编号:1006-7949(2016)03-0017-04
作者简介:杨雪峰(1983-),男,讲师,硕士.
基金项目:中央高校基本科研业务费专项资金资助项目(SWJTU12BR014/SWJTU12ZT07);国家自然科学基金资助项目(51178404);“2011计划”轨道交通安全协同创新中心经费资助项目
收稿日期:2014-12-17
