基于滑模控制的飞轮储能稳定光伏微网离网运行母线电压策略的研究
2016-04-11赵晗彤张建成
赵晗彤,张建成
基于滑模控制的飞轮储能稳定光伏微网离网运行母线电压策略的研究
赵晗彤,张建成
(华北电力大学电气与电子工程学院,河北 保定 071003)
由于受到自然因素的影响,离网运行的光伏微网电源输出功率具有间歇性和随机性,这会导致其母线电压产生波动。因此需配置一定容量的储能设备,以确保供电的可靠性和电能质量。提出一种采用飞轮储能系统辅助储能的光伏发电方案,设计了分段稳定直流母线电压的控制策略。基于滑模变结构控制理论对飞轮驱动电机的充/放电环节进行了分析和控制方法推导。在Matlab/Simulink仿真环境下搭建了相应的仿真模型。分别对采用传统PI方法和滑模控制方法两种方式下母线电压控制过程进行了仿真,结果表明滑模控制更具有优越性,光伏微网的电压质量得到了有效的提高。
光伏;随机性;飞轮储能;滑模;电压
0 引言
随着化石燃料的日益减少,新能源发电发展迅速。在众多的新能源发电技术中,光伏发电备受瞩目[1-6],在微网中的应用也较多。但由于光伏发电受光照强度、温度等的影响,会产生比较大的功率波动[7]。使微网不能稳定、持续地输出电能,难以准确地跟踪负荷变化。这将直接导致其供电质量不高。因此,为了保证供电的可靠性[8]和电能质量,在光伏微网中配置一定容量的储能设备是非常必要的。
在实际应用的光伏微网中储能装置多采用蓄电池。虽然蓄电池能够为负荷供给电能的时间比较长,但它却有着功率密度低、循环利用寿命短等缺点[9]。飞轮储能作为新型的储能元件,具有动态响应快,功率密度高,充放电时间短且无循环次数的限制,预期寿命长,环境友好等特点。相比较于蓄电池,可靠性更加地优越。将飞轮储能与蓄电池相互配合使用,储能系统将会同时具备大功率充放电和大储能量的特性,蓄电池的使用寿命也会得到有效地延长。二者的结合非常适用于对微网内功率波动的平抑,从而稳定母线电压。应用前景非常广阔。
本文提出了一种运用飞轮储能作为辅助性元件的离网运行下光伏微网方案。在光伏独立微网的输出功率或负荷发生短时波动时,由飞轮储能系统补充功率缺额或吸收多余的功率。以此来提高微网的可靠性和电能质量。
1 系统构成
系统结构如图1所示,主要由光伏阵列、BOOST变换器、蓄电池、飞轮储能系统和负载等组成。实现最大功率的跟踪是BOOST变换器的主要作用,与此同时,它将光伏阵列由比较低的电压升到比较高的电压来满足系统需要。直流母线通过BOOST变换器与光伏阵列相连接,能够直接向直流负载用户供电,亦或经过DC/AC逆变器为交流负载用户供电。蓄电池作为主要的储能元件,经由双向DC/DC变换器与直流母线相连。飞轮储能系统直接连接于直流母线上,由双向AC/DC变换器和飞轮系统构成,用于实现对微网内短时电压波动的平抑。

图1 光伏微网离网运行时的模型图
2 光伏独立微网直流母线电压的控制
根据国标要求,直流母线电压允许的波动范围为-5%n到+5%n。为了提高能源利用率,采用分段稳定电压的策略。当dc低于0.95n时,飞轮储能系统开始减速放电,稳定电压于0.95n。当dc高于1.05n时,投入飞轮储能系统加速充电稳压,稳定值为1.05n。
滑模变结构控制是一种不基于被控对象精确数学模型的智能控制方法,本质上是一类特殊的非线性控制,具有动态响应快,鲁棒性强等优点。文中飞轮储能的充/放电环节均采用了滑模控制方法。
3 光伏发电电源
3.1 光伏电池的特性
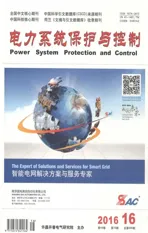
日照强度和环境温度的变化会造成光伏电池的输出功率发生改变。光伏电池的输出特性曲线[10]如图2和图3所示。从图中可以看出,光伏电池的输出特性具有很强的非线性特点。
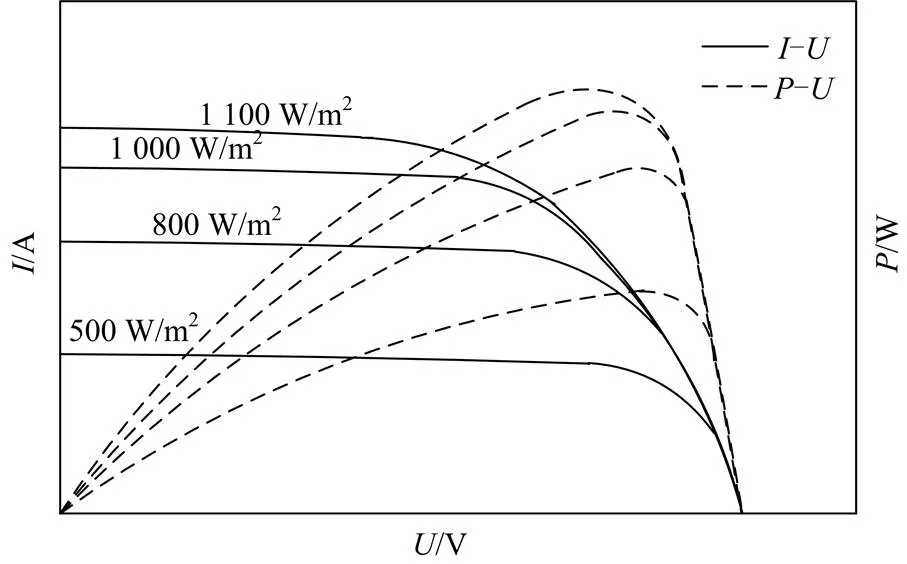
图2 相同环境温度下不同光照强度的输出特性曲线
3.2 最大功率点跟踪
在图2中的光伏电池的特性曲线里,当功率达到最大值的时候,它对应着一个电压值,此处的功率和电压对应于坐标系上的点即为最大功率点。外界环境的变化会导致光伏电池的输出也发生改变。为了能够随时地输出最大功率来提高发电效率,常常采用最大功率点跟踪(MPPT)的方式。纵观为数众多的MPPT控制方法,最为广泛应用的是电导增量法和扰动观察法[11]。
本文选择变步长扰动观察法[12]作为MPPT控制方法。这种控制方法的优点是可以提高最大功率点的跟踪速度和精度,增大效率,减小震荡。
4 飞轮储能系统
4.1 飞轮储能系统的组成
图4是一种飞轮储能系统的结构示意图。飞轮储能系统是一种新型的机电能量转换与存储的装置。它的工作原理为:当系统处于储能阶段的时候,电机运行在电动机模式。电能经由双向DC/AC变换器驱动电机进行加速旋转,进而电机拖动与其同轴相连的飞轮进行加速储能,能量便以动能的形式得以贮存。当飞轮的转速达到其最大转速后,系统则从此进入了能量保持阶段,转速维持恒定不变。直至接收到控制信号,被要求释放能量,系统才会转入释能放电阶段;在这个释放动能的过程中,飞轮利用其自身的惯性拖动电机减速发电,通过双向DC/AC变换器输出满足电力供应要求的电能,从而完成动能到电能的转换过程。图5为飞轮储能系统的主电路拓扑结构,由电机、飞轮转子和双向DC/AC变换器组成。
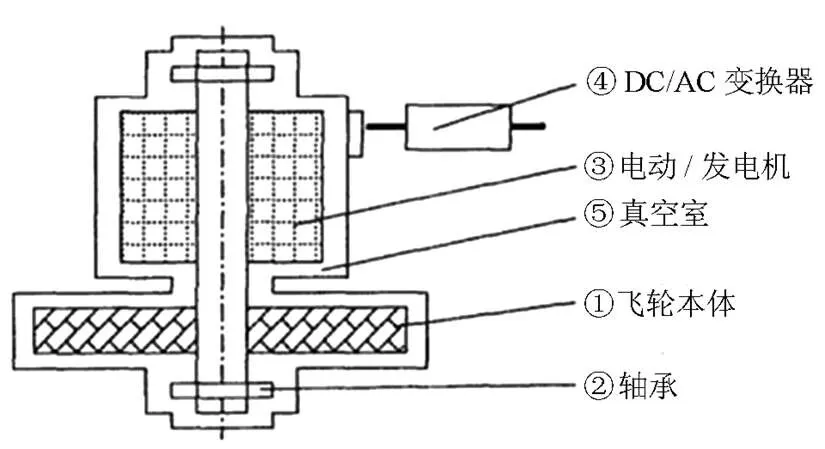
图4 飞轮储能系统的结构
图5 飞轮储能系统主电路拓扑结构
4.2 永磁无刷直流电机的数学模型
对于永磁无刷直流电机,在建立数学模型的时候,选择直接利用电机本身的相变量的方式。假设磁路非饱和,三相绕组完全对称,不计涡流和磁滞损耗。由于转子位置的变化不影响转子磁阻的大小,所以定子绕组的自感和互感均为常数。则相绕组的电压平衡方程式可以表示为
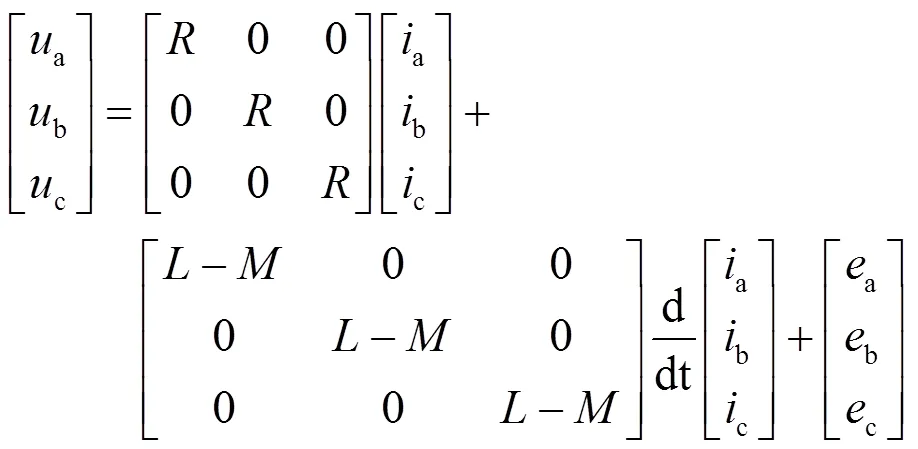
式中:a、b、c是定子绕组相电压;是定子绕组相电阻;a、b、c是定子绕组相电流;a、b、c是定子绕组相电动势;是定子绕组自感;是定子绕组互感。
反电动势幅值的计算公式[13]为

永磁无刷直流电机的机械运动方程[13]为
(3)
式中:p为反电动势幅值;ep为反电动势系数;e为电磁转矩;L为负载转矩;为转子的转动惯量;为阻尼系数。
4.3 飞轮驱动电机的控制策略
当微网母线电压高于1.05n时,若要使其继续稳定在允许范围内,则要求直流母线通过DC/AC变换电路向飞轮储能端输送能量。当检测到转速小于其极限值*时,飞轮进入加速充电模式。飞轮充电的控制策略采用转速-电流双闭环控制。外环是转速环,采取滑模控制器;电流环作为内环,选用PI调节器。滑模控制器的输出量为电流环的给定信号*。控制框图如图6所示。
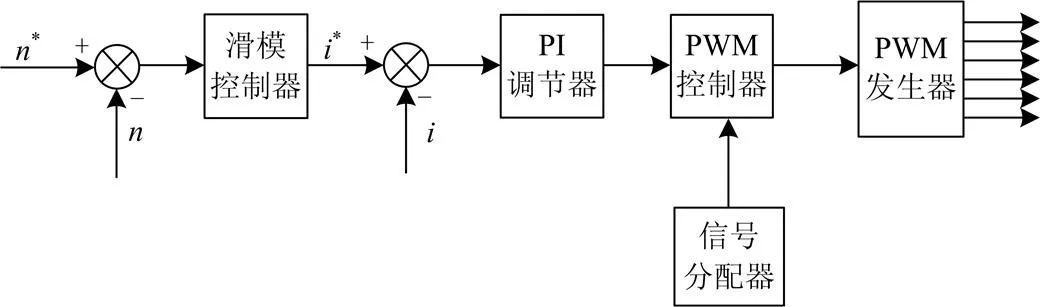
图6 飞轮储能的充电控制框图
基于无刷直流电机的数学模型,对转速环的滑模控制器进行设计。
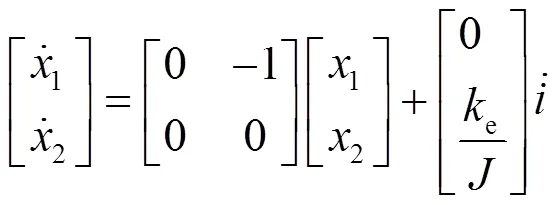
式中:0为给定角速度;为实际角速度;e为电磁转矩常数;为转动惯量;为给定电流输出。
依照比例切换控制律,可令

(6)
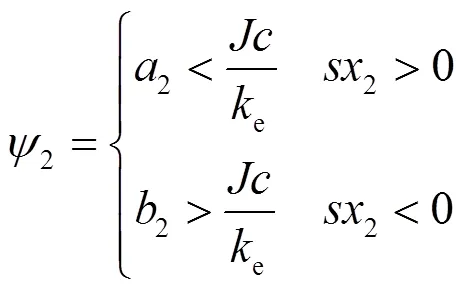
则可以得到滑模控制器的输出是:
(8)
当微网母线电压低于0.95n时,若要其继续稳定于允许范围内,飞轮储能端要经由AC/DC变换电路向直流母线输送能量。飞轮进入放电模式后,永磁无刷直流电机采取回馈制动工作方式[14]。飞轮放电时的控制策略采用电压-电流双闭环控制。外环是电压环,选择PI调节方式;内环是电流环,采用滑模控制器进行调节。电压调节器的给定误差信号为,其输出量为滑模控制器的输入信号*。控制框图如图7所示。
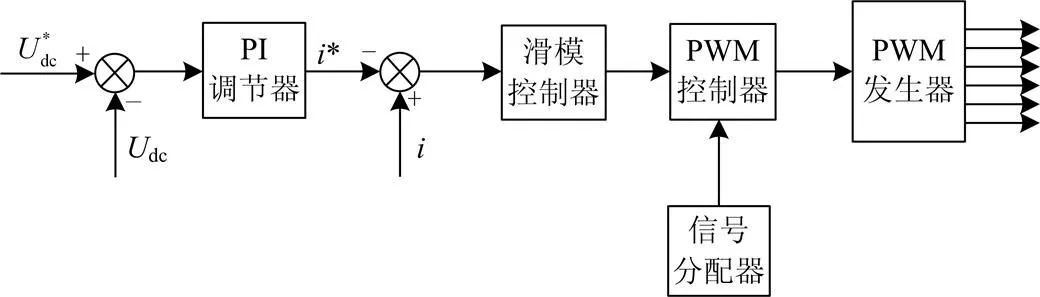
图7 飞轮储能的放电控制框图
飞轮处于放电阶段时,电机的端电压会因低于直流母线侧电容上的电压而无法直接放电。因此电路中需要设置升压环节。电机回馈制动的本质是将电机自身的电感作为储能电感的BOOST升压电路。如此便不必在主电路中额外加一级电路进行升压,不但省略了相关的硬件,而且提高了系统的可靠性。
基于回馈制动是BOOST升压电路的实质,对电流环的滑模控制器进行了设计。BOOST升压电路是一种电压调节器,输出电压是最终的控制目标。理论上,滑模面应该选取为电压的误差。但根据文献[15],当直接控制输出电压时,滑模面上的运动是不稳定的。所以只能令电压作为间接控制对象,取电感电流误差作为滑模面。

式中,是为了降低开关频率而引入的滞环宽度。的选取与开关器件工作频率相关,具体关系式为
(10)
式中:为开关器件工作频率;为储能电感;g和0为直流输入电压和输出电压。
上式适用于*不变的情况。在所提出的双环控制系统中*不能严格保持不变,会因受电源内阻、开关器件附加电阻的影响而与计算所得有不同之处。在仿真中可先根据所选开关器件的频率倒推出的大小,再在其附近择出最佳值。
当微网母线电压一直处于电能质量所要求的±5%n范围内时,发出功率与所需功率基本平衡。储能设备不需要启动,则飞轮一直处于恒速运转状态,不进行储存或释放能量。
飞轮储能的充电和放电是作为一个整体存在的。由于两者的控制策略并不相同,所以在两种模式间需要加入切换控制,具体控制框图如图8所示。
5 仿真分析
为了验证文中所设计的控制策略的可行性,在Matlab/Simulink软件中进行了相关内容的仿真。系统参数如下:在标准日照强度和环境温度下,光伏阵列的开路电压为353.6 V,短路电流为21.16 A,最大功率点电压为283.2 V;直流母线额定电压为500 V;飞轮驱动电机的基本参数为:=2.875 0 Ω,-=8.5 mH,=4,=0.8e-3kg·m2,N=12 000 r/min。
光伏独立微网运行时,受到的外界干扰主要是光照的变化和负载的突变。仿真过程中分别在PI控制和滑模控制两种方式下对其进行模拟,以便对比与分析。
当日照强度大,环境温度较高或者负载减少导致直流母线电压高于上限时,飞轮储能加速充电稳压。仿真结果见图9、图10和图11。

图9 直流母线电压
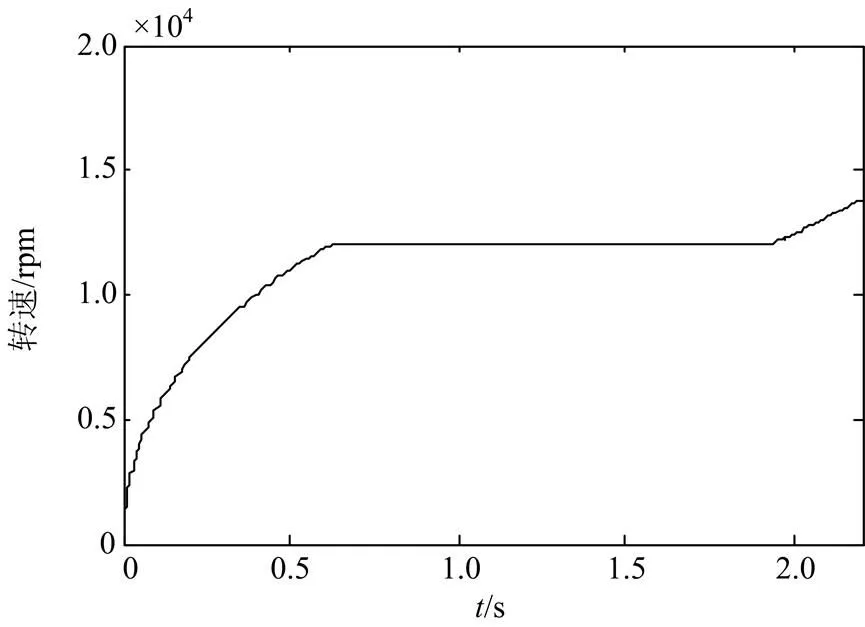
图10 飞轮转速

图11 功率曲线
由图9可以看出,在飞轮储能装置接入前,由于光照或负载的变化,直流母线电压在1.95 s左右超出电压上限525 V。接入飞轮储能装置后,PI控制下没有很好地抑制电压的波动;滑模控制优于PI控制,直流母线电压能够一直稳定于上限,满足了电能质量的要求。图10为飞轮的转速曲线,飞轮在1.95 s以前处于充电并保持状态,1.95~2.2 s期间进行加速充电。图11中的三条曲线分别为光伏功率曲线、负载功率曲线和飞轮储能功率曲线。在电压超出上限值时,飞轮储能能够及时地消化额外的功率,使其稳定在上限。
在阴天日照强度较弱,环境温度低或者负载加重造成直流母线电压低于下限时,需要飞轮储能向母线提供能量。仿真结果见图12、图13和图14。
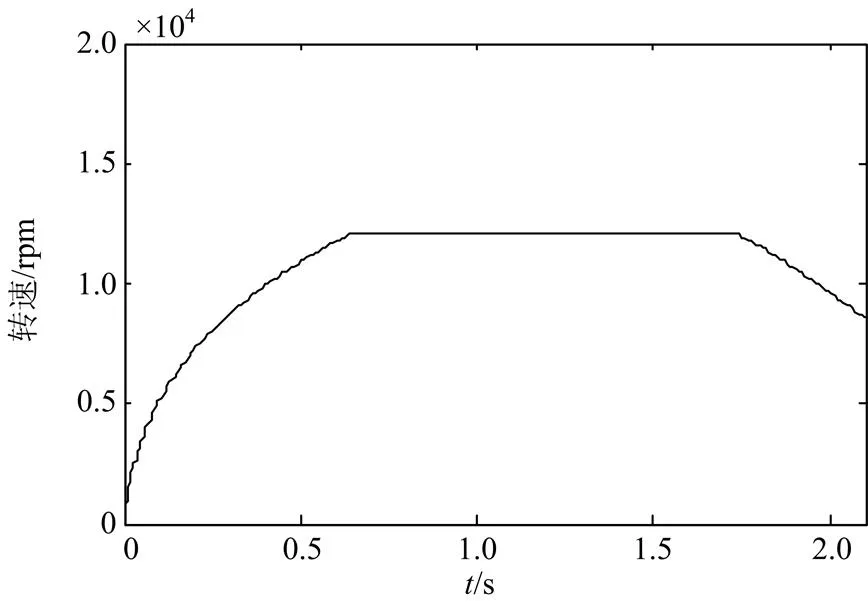
图13 飞轮转速
由图12可以看出,接入飞轮储能装置前,光照或负载的变化导致直流母线电压在1.78 s左右越过电压下限475 V。飞轮储能装置接入后,PI控制下有阻止电压下降的趋势,但是依然低于下限值;滑模控制优势明显,使得直流母线电压一直能够稳定在下限,符合要求。图13为飞轮的转速曲线,在1.78 s之前处于充电并保持状态,1.78~2.1 s期间减速放电。图14分别为光伏功率曲线、负载功率曲线和飞轮储能功率曲线。电压低于下限后,飞轮储能立即减速放电,释放自身的功率来稳定电压于下限值。
由上述仿真结果可知,基于滑模变结构控制的飞轮储能作为短期储能元件,能够很好地调节直流母线的即时变化电压。离网运行下,光伏微网的电压质量得到了有效地提高。
6 结语
本文将飞轮储能作为辅助性能量调节单元,应用于离网运行的光伏微网中。制定了利用飞轮储能稳定微网母线电压的相关控制策略。运用仿真软件Matlab对文中提出的基于滑模变结构控制的方案进行了仿真研究。结果表明,与PI控制方法相比,滑模控制方法的效果更佳,在光照或负载发生变化的情况下,微网母线电压能够被控制在所允许的范围内,从而验证了所提控制策略的可行性和有效性。
[1] 黄冬冬, 吴在军, 窦晓波, 等. 光伏规模化并网的电能质量复合控制策略研究[J]. 电力系统保护与控制, 2015, 43(3): 107-112.
HUANG Dongdong, WU Zaijun, DOU Xiaobo, et al. A power quality composite control strategy based on large- scale grid-connected photovoltaic power generation[J]. Power System Protection and Control, 2015, 43(3): 107-112.
[2] 陈刚, 袁越, 傅质馨. 储能电池平抑光伏发电波动的应用[J]. 电力系统及其自动化学报, 2014, 26(2): 27-49.
CHEN Gang, YUAN Yue, FU Zhixin. Application of storage battery to restrain the photovoltaic power fluctuation[J]. Proceedings of the CSU-EPSA, 2014, 26(2): 27-49.
[3] 杨磊, 谭涌波, 强玉华, 等. 太阳能光伏发电系统雷电灾害及防御分析[J]. 高压电器, 2015, 51(6): 62-67.
YANG Lei, TAN Yongbo, QIANG Yuhua, et al. Analysis on lightning disasters of solar photovoltaic power generation system and prevention scheme[J]. High Voltage Apparatus, 2015, 51(6): 62-67.
[4] 薛金花, 叶季蕾, 汪春, 等. 飞轮储能在区域电网中的调频应用及经济性分析[J]. 电网与清洁能源, 2013, 29(12): 113-118.
XUE Jinhua, YE Jilei, WANG Chun, et al. Frequency regulation application and economic analysis of flywheel energy storage in a regional power grid[J]. Power System and Clean Energy, 2013, 29(12): 113-118.
[5] 崔红芬, 汪春, 叶季蕾, 等. 多接入点分布式光伏发电系统与配电网交互影响研究[J]. 电力系统保护与控制, 2015, 43(10): 91-97.
CUI Hongfen, WANG Chun, YE Jilei, et al. Research of interaction of distributed PV system with multiple access points and distribution network[J]. Power System Protection and Control, 2015, 43(10): 91-97.
[6] 姚致清, 张茜, 刘喜梅. 基于PSCAD/EMTDC的三相光伏并网发电系统仿真研究[J]. 电力系统保护与控制, 2010, 38(17): 76-81.
YAO Zhiqing, ZHANG Qian, LIU Ximei. Research on simulation of a three-phase grid-connected photovoltaic generation system based on PSCAD/EMTDC[J]. Power System Protection and Control, 2010, 38(17): 76-81.
[7] 陈丽丽, 牟龙华, 刘仲. 光储柴微电网运行特性分析[J]. 电力系统保护与控制, 2015, 43(12): 86-91.
CHEN Lili, MU Longhua, LIU Zhong. Analysis of the operating characteristics of a PV-Diesel-BESS microgrid system[J]. Power System Protection and Control, 2015, 43(12): 86-91.
[8] 李继方, 高明远, 陈杰, 等. 一种基于神经网络的多能源共直流母线混合供电控制策略[J]. 电力系统保护与控制, 2010, 38(20): 141-147.
LI Jifang, GAO Mingyuan, CHEN Jie, et al. A control strategy for multi-energy hybrid power supply based on neural network[J]. Power System Protection and Control, 2010, 38(20): 141-147.
[9] 田慧雯, 李咸善, 陈铁, 等. 基于混合储能的光伏微网孤网运行的综合控制策略[J]. 电力系统保护与控制, 2014, 42(19): 122-128.
TIAN Huiwen, LI Xianshan, CHEN Tie, et al. Comprehensive control strategy of hybrid energy storage-based photovoltaic island microgrid[J]. Power System Technology, 2014, 42(19): 122-128.
[10]孙濛濛. 基于直流微网的光伏系统研究[D]. 保定: 华北电力大学, 2013.
SUN Mengmeng. Research on photovoltaic system based on DC micro-grid[D]. Baoding: North China Electric Power University, 2013.
[11]李艳青, 田建设, 刘春堂. 基于全局变步长电导增量法光伏阵列MPPT研究[J]. 黑龙江电力, 2012, 34(6): 428-431.
LI Yanqing, TIAN Jianshe, LIU Chuntang. Photovoltaic array maximum power point tracking based on global variable step size INC method[J]. Heilongjiang Electric Power, 2012, 34(6): 428-431.
[12]解广识, 张广明, 张进明, 等. 一种改进的变步长电导增量法在光伏MPPT中的应用[J]. 机床与液压, 2011, 39(19): 38-40.
XIE Guangshi, ZHANG Guangming, ZHANG Jinming, et al. Application of improved incrementa conductance algorithm using variable step in MPPT control of the PV system[J]. Machine Tool & Hydraulics, 2011, 39(19): 38-40.
[13]刘硕洋. 永磁无刷直流电机回馈制动控制技术[D]. 长沙: 湖南大学, 2013.
LIU Shuoyang. Regenerative braking control technology of permanent magnet brushless DC motor[D]. Changsha: Hunan University, 2013.
[14]黄斐梨, 王耀明, 姜新建, 等. 电动汽车永磁无刷直流电机驱动系统低速能量回馈制动的研究[J]. 电工技术学报, 1995, 10(3): 28-36.
HUANG Feili, WANG Yaoming, JIANG Xinjian, et al. Study on regenerative braking of permanent magnet brushless DC motor drive system at low speed for electric vehicles[J]. Transactions of China Electrotechnical Society, 1995, 10(3): 28-36.
[15] HEBERTI S R. Sliding motions in bilinear switched network[J]. IEEE Transactons on CAS, 1987, 34(8): 919-933.
(编辑 姜新丽)
Research on bus voltage control strategy of off-grid PV microgrid with flywheel energy storage system based on sliding mode control
ZHAO Hantong, ZHANG Jiancheng
(School of Electrical and Electronic Engineering, North China Electric Power University, Baoding 071003, China)
Due to the impact of natural factors, the output power of off-grid photovoltaic microgrid source is intermittent and random. This will lead to fluctuations of the bus voltage. To ensure the reliability and power quality of power supply, configuring a certain capacity of storage devices becomes necessary. This paper proposes and designs a PV program which the flywheel energy storage system is applied to as an auxiliary and control strategy that stabilizing the DC bus voltage in sections. Charge/discharge link of the drive motor for flywheel and its control method is analyzed and deduced based on theory of sliding mode control. A corresponding simulation module is constructed in Matlab/Simulink simulation environment. Controlling the bus voltage in two ways in the simulation, including the traditional PI control and sliding mode control, the results demonstrate the superiority of the sliding mode control method. The voltage quality of PV microgrid is effectively improved. This work is supported by National Natural Science Foundation of China (No. 51177047).
photovoltaic; random; flywheel energy storage system; sliding mode; voltage
10.7667/PSPC151495
国家自然科学基金项目(51177047);河北省科技支撑计划项目(16214504D)
2015-08-23;
2015-10-03
赵晗彤(1989-),女,硕士研究生,研究方向为飞轮储能及其在微网中的应用;E-mail: zhaohantong111@163.com 张建成(1965-),男,教授,博士生导师,研究方向为新型储能技术和可再生能源发电控制技术。E-mail: zhang_ jiancheng@126.com