可移动式风洞实验研究
2016-04-11陈述平
赵 曼 吕 飞 周 飞 冷 轩 陈述平
(东北大学 机械工程与自动化学院,沈阳 110000)
可移动式风洞实验研究
赵 曼 吕 飞 周 飞 冷 轩 陈述平
(东北大学 机械工程与自动化学院,沈阳 110000)
摘 要:为了定量研究扑翼飞行器的各项数据,本实验搭建了可移动式风洞试验平台。与传统实验平台相比,本实验平台具有占地面积小、结构简单、无涡流等特点。尤其是本实验平台采用了其他试验平台都未采用的移动式风洞,并在分析中加入形变量,用以研究扑翼形变和升力等扑翼特征的关系,其实验结果为进一步研究扑翼提供了实验数据。
关键词:风洞 扑翼飞行器 测试 形变
引言
随着微机电系统(Microelectromechanical System,MEMS)技术的快速发展,20世纪末开始,微型扑翼飞行器(Flapping wings Micro Aero Vehicle,FMAV)的研究吸引了众多学者的研究目光,相关成果开始不断涌现。
国内外,目前的研究方式主要为气动计算和风洞实验。现有多种针对扑翼的非定常气动特性的算法。例如,katz[1]、Giesing[2]、Basu[3]等使用面元法和涡格法进行计算。但是,这些研究基本上都是基于简单的刚性翼的简谐扑动模型,与实际情况相差甚远。风洞试验方面,由于微型飞行器的雷诺数较小,还涉及非定常空气动力学、微型动力能源系统、微型飞控系统以及微型任务系统等其他技术,所以微型扑翼飞行器的小雷诺数低速风洞必须专门设计。
世界上低速风洞大多分布在欧美等发达国家和地区。其中,40余座在美国,10余座在俄罗斯,30余座在欧洲和日本。目前,低速风洞主要分为三种类型:全尺寸低速风洞、大中型低速风洞、大型低速增压风洞。但是,关于小雷诺数的风洞研究为数不多。
目前,国内只有南京航空航天大学和西北工业大学设计出适用于测试微型扑翼飞行器的低速风洞(见图1、图2)。为了精确测量微型飞行器所受气动力,南京航空航天大学空气动力学系低速风洞实验室设计研制了高精度的杆式六分量天平。该天平可实时测出所有六个气动力分量。其中,升力量程1000g,阻力分量500g,测量精度可达0.5g。

图1 南京航天航空大学低速风洞

图2 西北工业大学低速风洞
随着许多新技术的发明应用,微型飞机的研究和发展也进入了一个新的阶段。各国科研人员纷纷参与到设计微型飞行器的竞赛当中。同固定飞机的风洞实验相比,鸟类飞行的实验研究更复杂,实验设备也没有固定翼飞机那么全面。因此,至今只有少量的试验数据可供参考。因此,自制微型扑翼机测试平台是一件迫切的事,也是飞行器发展和提升性能的一种途径。
1 系统的硬件结构
本文涉及的自制微型扑翼机测试平台装置的三维图如图3所示。图4为设置的实验装置实物图。该装置通过对微型扑翼飞行器进行运动学仿真计算,然后再利用自制的移动式风洞对微型扑翼飞行器的机翼进行初步风洞实验。实验内容包括扑动频率、风速、俯仰角、机翼平面形状、翼型弯度对机翼气动特性影响的研究。通过实验得出实际数据,并将其与计算得出的仿真数据进行对比,判断其合理性后,总结出微型扑翼飞行器升力推力产生的基本规律,为微型扑翼飞行器整体设计和气动设计提供参考。

图3 装置三维图

图4 实验装置实物图
1.1 行走驱动
行走驱动由电源和传动机构组成,为整个装置供电并使测试部分沿导轨运动。它的主要结构包括支座、集电导轨碳刷、齿条、直线导轨、伺服电机、减速器、齿轮。
支座为高度可调式支座,可借助激光水平仪等仪器调平轨道。通过集电导轨碳刷对移动平台进行供电,可有效解决电线的拖拽问题。电机为雷赛BLM57090-1000伺服电机,通过CRT-DMC300A三轴运动控制器控制,配合雷赛ACS606驱动器工作。通过行星减速器为齿轮齿条传动机构提供动力,使测试平台移动。这里,移动速度可根据需要实行编程控制。
基本参数:电机额定扭矩0.29N·m,额定转速3000r/min,DC36V供电;减速器减速比1:6;轨道基本长度6m,试验段2m(可拓展);稳定风速2~3m/s。
1.2 测试模块
测试模块通过三轴力传感器和激光二维扫描传感器测得扑翼部分的升力、推力及机翼形变参数。主要结构有三轴力传感器、激光二维扫描传感器、信号放大器、数据采集卡及底座。
三轴力传感器型号为A3D38,采集扑翼飞行器的推力、升力参数;激光二维扫描传感器型号为ZLDS200,通过丝杠传动使其沿直线运动,将扫描范围由线变为面,从而对机翼扑动过程中翼面形变参数进行测量,并通过放大器对信号进行放大,通过数据采集卡采集数据。
根据激光二维扫描传感器采集有效范围计算,得到翼面回转中心高度为315mm。为减少移动平台上装置对翼扑动气流的影响,从而确定底座高度为340mm。底座三维建模尺寸仿移动网络信号塔设计,以增强装置稳定性,避免共振。
基本参数:
三轴力传感器量程:升力±50N,推力±50N;
精度:升力相对均方根误差0.5%,推力相对均方根误差0.5%;
二维激光扫描传感器:Z轴量程300mm,Z轴量程起始间距165mm,Z轴量程终点间距465mm,Z轴量程线性度±0.1%~0.15%,X轴量程起始宽度130mm,X轴量程终点宽度240mm,X轴线性度0.2%,X轴轮廓线像素1024,采样频率250Hz(满量程),最大轮廓线频率1000轮廓/s、1024000点/s,激光器类型最大15mW、波长660nm,数字输出为以太网,供电为DC 9~36V。
1.3 扑动机构
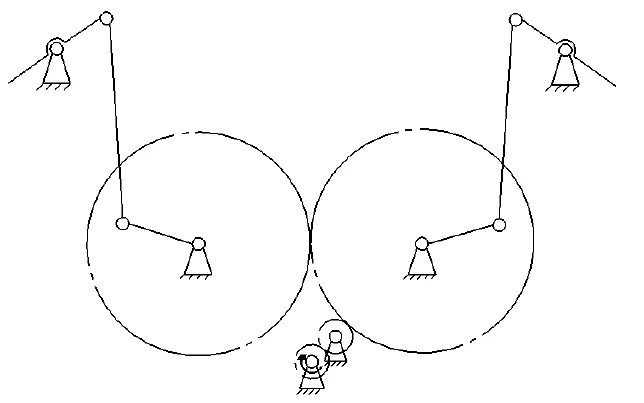
图5 扑动机构的机构简图
扑动机构通过铝制联结件固定在三轴力传感器上,可装卡不同的翼型进行飞行参数的测试(见如5)。采用双曲柄摇杆机构,由直流永磁无刷电机提供动力。同时,使用Solidworks软件的motion插件对杆机构进行优化,使翼的角速度曲线趋近于正弦曲线,减小冲击(见图6)。此外,使用角度调节器实现俯仰角的调整。

图6 角位移、角速度、角加速度变化曲线
2 传感器的数据采集及分析
通过大量实验采集数据,结合在不同频率、俯仰角和来流速度情况下各种机翼的升力、推力及翼面形变参数间的关系和规律,总结扑翼飞行器的空气动力学规律。
2.1 三维力采集系统
采用的三维力传感器为应变式压力传感器,分别可以测量x、y、z三个方向的分力,再运用力的合成法则,求出空间力的大小。图7为三维力数据采集系统示意图。
应变式压力传感器分为输入端和输出端。输入端接标准5V电源。输出端输入量随该方向上的力大小变化而正比变化,且输出信号为毫安级。所以,三维力传感器先与放大器(放大器给传感器提供电源)连接,放大器的放大倍率约为1000倍。放大后信号输入采集卡,采集卡进行A/D转换,然后将得到的数字信号输入电脑。在采集软件里,对采集卡输出的数字量按照一定的算法进行处理,得到力的大小。数据以TDMS格式输出,通过labview查看,转化为excel格式的数据和直观的折线图,如图8所示。
2.2 扫描传感器系统

图7 三维力数据采集系统

图8 采集软件的界面图
扫描传感器的数据采集和转换都集成在传感器内部,系统相对简单。扫描传感器外接36V(电压决定扫描传感器的扫描频率)直流电源,通过网线向电脑传送数据及指令。
2.3 两个传感器时间轴的对齐方法
采集过程比较快,因此可以忽略采集过程时间,认为采集和写入是同一时间。所以,两个传感器数据写入时给两个传感器的数据都加上时间属性(时间值来自系统时间),取同一时间作为两个数据的起点,以此来研究两个数据的规律。
3 试验装置可靠性验证
图9为装置所采集的三组图像,分别是在来流速度2.1m/s、翼扑动频率3HZ、迎角0°情况下的升力(Z轴采集的信号)图像及对其进行傅里叶拟合得到的拟合图像。三幅图中,拟合图像的波形、幅值、频率基本相同,所以三组数据的可重复性很好。图10则为上述三组数据频谱分析图像。由图可看出,图9中升力图像中的波频率主要为3Hz、50Hz。其中,3Hz波为所测升力信号,50Hz波为噪声信号(主要是导轨电源带来的工频噪音)。去掉高频数据后剩下的信号的频率和微型飞行器翅膀扑动的频率相同,可以看出实验数据重复性较好。上述数据及分析可知,滤波后的信号频率和微型飞行器翅膀扑动的频率相同,说明该装置测试数据可靠性很好,所测实验数据合理。
4 所测升力数据的初步分析
采集卡1s可采集10240次三维力传感器数据信号。在测试装置扑动频率为3Hz,采样时间为1.5s的相同情况下,连续实验得到多组数据。
由于实验数据具有重复性,从图10中可以看出压力值曲线在3Hz和50Hz左右出现峰值。3Hz是测试装置扑动的频率,50Hz是交流电工频(噪声)带来的影响。下一步,则采用低通滤波方法对信号进行处理。
从图11的时域图可以看出,经过低通滤波器处理后的信号曲线呈现明显的周期性(在1.5s内有4.5个周期变化),即信号的频率在3Hz左右;在图11的频谱图中可以看出,经过低通滤波器处理后的信号主要以3Hz的频率信号为主。
处理后的压力值信号就是微型飞行器在测试装置上飞行时z轴方向的受力大小。压力值在[-2.5841N,3.6116N]之间波动,平均升力值为0.4041N,测量误差为5‰。

图9 受力分析图

图10 升力频谱分析
5 激光二维扫描传感器所测柔性翼形变数据初步处理
图12为由1mm厚PP材料制作完成的柔性翼在来流速度2.1m/s、翼扑动频率3Hz、迎角0°情况下,不同时刻翼的切面图像。从图中可以看出,它能够直观反映出翼的形变,可由此研究柔性翼的相关规律。

图11 采用低通滤波器对信号进行处理的时域图和频谱图
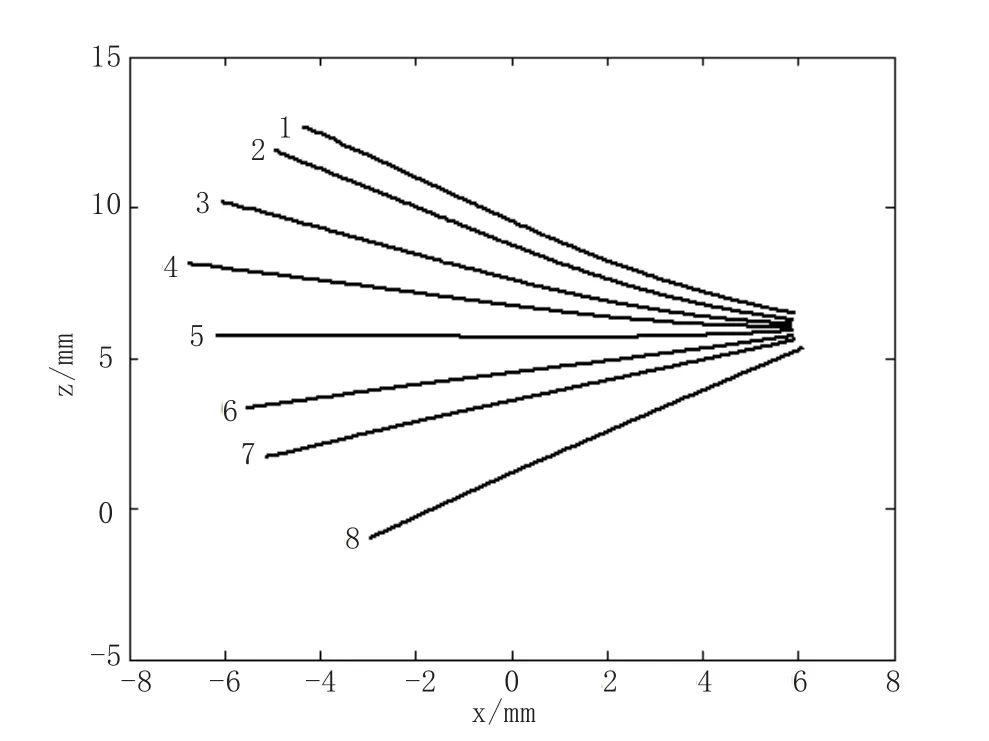
图12 不同时刻翼的切面图像
参考文献
[1]KATZ J,PLOTKIN A. Low Speed Aerodynamics:From Wing Theory to Panel Methods[M].New York:McGraw-Hill,1991.
[2]JP Giesing.GIESING Nonlinear Two-dimension Unsteady Pote-ntial Flow With Lift[J].Journal of Aircraft,1968,(2):135-142.
[3]BASU.The Unsteady Motion of a Two-dimension Aerofoil in Incompressible Inviscid Flow[J].Journal of Fluid Mechanics,1978,(1):159-178.
Experimental Study of Movable Wind Tunnel
ZHAO Man,LV Fei,ZHOU Fei,LENG Xuan,CHEN Shuping
(School of mechanical engineer ing and automation, Northeastern University, Shenyang 110000)
Abstract:This paper builds an experim ental platform for themovable wind tunnelwith the purpose of res earching various data of theflipping-wing air vehicle quantitatively. Comparing with the traditional platforms, thisplatform has some advantages:less occupied area, simply structure and less vortex when We adopt the movable wind tunnel, which is not applied in other platforms, and put forward analyzingmethods ofthe deformation variables in order to research the relation of the deformation and other features. The results will providelots of experimental data for further research.
Key words:wind tunnel, flipping-wing air vehicle, tes t, deformation
