激励器结构对三电极等离子体高能合成射流流场及其冲量特性的影响
2016-04-11宇罗振兵李海鹏王林夏智勋
张 宇罗振兵李海鹏王 林夏智勋
(1.国防科学技术大学航天科学与工程学院,湖南长沙 410073;2.中国国防科技信息中心,北京 100142)
激励器结构对三电极等离子体高能合成射流流场及其冲量特性的影响
张 宇1,罗振兵1,*,李海鹏2,王 林1,夏智勋1
(1.国防科学技术大学航天科学与工程学院,湖南长沙 410073;2.中国国防科技信息中心,北京 100142)
等离子体激励器以其结构简单、响应速度快、环境适应性强等优势,已成为主动流动控制技术和流体力学研究的前沿与热点。相比于传统两电极激励器,三电极等离子体高能合成射流激励器具有更高的能量效率,形成射流冲量更大,有望成为新型快响应直接力产生装置。为揭示激励器结构对射流流场和冲量特性的影响规律,进而优化激励器结构参数,利用电参数测量装置、高速阴影系统及自主设计的单丝扭摆式微冲量测量系统对不同射流孔径、腔体体积和电极间距的三电极激励器放电特性、射流流场及其冲量进行了实验研究。为对比激励器在不同工况条件下的工作特性,定义无量纲能量沉积ε和无量纲射流冲量I*,并分析了激励器结构参数对ε和I*的影响。结果表明对于给定无量纲能量沉积ε,激励器存在最优射流孔径;激励器无量纲能量沉积ε和无量纲射流冲量I*随腔体体积增加而减小,随激励器电极间距增加而增加;射流强度及其流场影响区域随腔体体积增加而减小,随激励器电极间距增加而增加。对比不同腔体体积和电极间距工况条件下I*随ε的变化可知,为设计具有较好射流冲量水平的激励器,在相同无量纲能量沉积ε条件下,应尽量增大激励器无量纲射流冲量I*。当设计激励器无量纲能量沉积ε小于初始工况时,应增大初始工况激励器腔体体积使无量纲能量沉积ε降低至设计值;当设计激励器无量纲能量沉积ε大于初始工况时,应增大初始工况激励器电极间距使无量纲能量沉积ε增加至设计值,使设计激励器具有较好的射流冲量水平。
等离子体合成射流;高速阴影;单丝扭摆;结构参数;主动流动控制;能量沉积;射流冲量;射流流场
0 引 言
等离子体激励器作为一种新型的流动控制方式,以其结构简单、响应迅速、工作频带宽、适应多工况等优点正受到越来越多的关注,极有可能成为主动流动控制技术的新突破[1-4]。目前广泛研究的等离子体激励器主要包括介质阻挡放电(DBD)激励器[1,5]、直流/准直流电弧放电激励器[6-7]和等离子体合成射流(PSJ)激励器[8-11]。其中介质阻挡放电激励器放电产生的体积力较小,诱导形成的射流速度较低,主要用于低速流动控制[4,12]。直流/准直流电弧放电激励器通过对放电区域及其附近气体进行快速加热实现对高速流的流动控制,但需要较大的功率输入[13-14]。等离子体合成射流激励器既可以产生速度高达数百m/s的高速射流[15],同时射流流场中伴随较强的压缩波系[16],可以兼具受控流场动量/能量注入的“涡控”和“波控”效果[17],对于实现超声速/高超声速流主动流动控制具有重要意义。
虽然经历了十余年的发展,但目前等离子体合成射流激励器仍处于基础研究阶段,其典型的两电极结构仍存在击穿电压高[18]、能量效率低[19]、射流冲量小[20]等不足。针对两电极等离子体高能合成射流激励器存在的以上不足,课题组设计了用于快响应直接力产生装置的三电极等离子体高能合成射流激励器[21],能够显著降低激励器工作击穿电压[17],提高激励器电极间放电电流[22],增大激励器能量效率和射流速度[16]。鉴于射流对高速流场的控制能力依赖于射流的冲量水平,为提高三电极等离子体高能合成射流激励器对高速流场的控制能力,需进一步优化激励器结构,提高激励器射流冲量。
本文利用电参数测量装置实验测量了三电极等离子体高能合成射流激励器放电特性,并利用高速阴影系统及自主设计的单丝扭摆式微冲量测量系统[23],对三电极等离子体高能合成射流流场及其射流冲量进行了实验测量,并研究了激励器结构参数(射流孔径、腔体体积、电极间距)对三电极等离子体高能合成射流流场及其冲量特性的影响。为开展三电极等离子体高能合成射流激励器应用于超声速/高超声速主动流动控制和侧向力控制研究奠定基础。
1 实验条件
1.1 三电极等离子体高能合成射流激励器
三电极等离子体高能合成射流激励器由放电电极、绝缘腔体和带射流出口的堵盖组成,如图1所示。其工作分为四个阶段——点火触发阶段、能量沉积阶段、射流喷射阶段和吸气复原阶段[21]。首先在激励器触发电极和阴极间建立脉冲电子通道,进而触发阳极与阴极间的电弧放电加热腔体内气体,升温加压的腔内气体从出口高速喷出,形成等离子体合成射流。而后由于等离子体高速射流的引射作用导致腔内形成负压以及腔内气体温度降低,外部气体重新回填腔体,准备进入下一个工作周期。
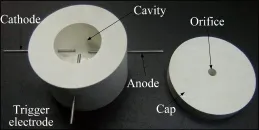
图1 三电极等离子体高能合成射流激励器Fig.1 Three-electrode plasma high-energy synthetic jet actuator
1.2 电源系统及电参数测量装置
三电极等离子体高能合成射流激励器电源系统及其电参数测量装置如图2所示。电源系统主要包括高压直流电源、高压脉冲电源和大小可置换的电容。其中高压直流电源为变压器推免式开关电源,提供激励器工作过程中的能量沉积,高压脉冲电源可以产生一个电压高达20 k V的瞬时脉冲,用于在激励器腔体内建立放电通道,触发高能量的电弧放电,激励器工作频率的调节可以通过高压脉冲电源的频率变化实现。如图3所示为高压脉冲电源的点火电路,其由电压调节单元、点火能量单元、点火触发单元三部分组成。通过调节电位器R1的取样电压,可以改变集成电路模块TL494输出方波的占空比,从而改变点火电路储能电容器的输出电压。工作时,IGBT功率管在TL494输出方波的推动下,经升压变压器T1,获得高压脉冲输出,经高压高频二极管D1整流后,对储能电容器C充电。当外接触发信号为高电平(或手动触发开关K3闭合)时,BG1导通,经T2输出高电平脉冲,触发SCR,使得点火储能电容器上所储电能经触发电极放电,形成点火火花放电。
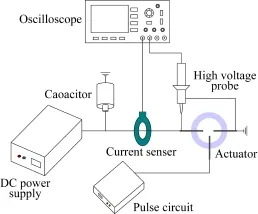
图2 电源系统及其电参数测量装置Fig.2 Power system and electric parameters measurement device
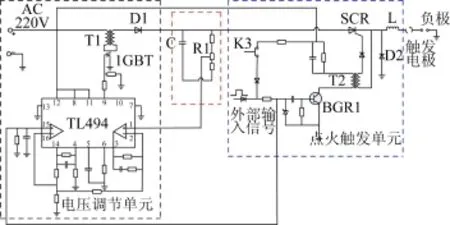
图3 高压脉冲点火电路Fig.3 Circuitry of the pulsed high-voltage source
等离子体合成射流激励器放电具有电流峰值大、放电时间短的特点,其放电电流采用Pearson电流传感器搭配10倍电流衰减探头进行实验测量(响应时间25ns,峰值电流20 k A)。放电电压采用Tek P6015A高压探头(1000×衰减,75 MHz带宽)进行测量,测量电压-电流信号采用Tek DPO3014四通道示波器(带宽100 MHz,单次采样速率2.5GS/s)采集。
1.3 高速阴影系统
采用高速激光阴影系统对等离子体合成射流的流场结构进行实验研究。如图4所示,点光源发出的光线经过扩束镜投射到凹面镜,经凹面镜反射后形成平行光打到平面镜上,平面镜反射后经过实验段,再由另一侧平面镜接收并反射,最后通过凹面镜反射汇聚后进入相机。
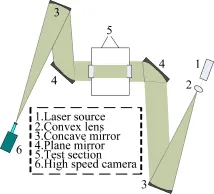
图4 高速阴影观测示意图Fig.4 Sketch of high-speed shadowgraphy
实验中采用半导体激光器产生连续激光,出光直径1 mm,输出波长532 nm,最大输出功率100 m W。
高速相机为Photron Fastcam SA-1.1高速彩色数字摄影仪,其最高拍摄速率可达1000000 fps,最短曝光时间达1/2 730 000 s,具有很高的时间分辨率。相机由激励器放电同步触发,保证激励器放电与相机拍摄的同步性。
1.4 单丝扭摆式微冲量测量系统
单丝扭摆式微冲量测量系统结构如图5所示,扭丝两端固定于扭摆架,中部连接扭摆杆,反射镜贴于扭摆杆中部,等离子体激励器固定于扭摆杆一端,激光器出光口、反射镜和标尺在同一水平面上。激励器工作产生射流反作用力直接作用于扭摆杆,致使贴于扭摆杆中部的反射镜随之发生偏转,激光器发射光线经反射镜后落在标尺上的光斑产生位移,该位移由高速相机记录。
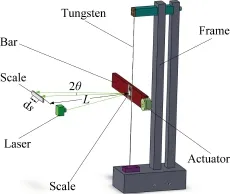
图5 单丝扭摆式微冲量测量装置结构图Fig.5 Structure of single line torsion pendulum
等离子体合成射流激励器单脉冲射流持续时间约为1 ms,远小于单丝扭摆振动周期(≈4.8 s),即认为等离子体合成射流激励器工作形成的射流反作用力瞬间作用于单丝扭摆装置,故建立不考虑力参数的等离子体合成射流冲量计算公式[24]:

式中:I0为标定冲量;θr0为标定偏转角;Sr为实验光斑位移;L为反射镜距标尺的垂直距离。
2 实验结果与分析
2.1 无量纲参数与实验工况
等离子体高能合成射流冲量计算公式如下:

式中:tf为射流喷射持续时间;Ath为射流出口截面积;pth为激励器出口压强;p∞为环境压强;ρth为出口射流密度;vth为出口射流速度。
由式(2)可知激励器射流冲量由腔体内外压差和射流动量两部分贡献。为综合研究各激励器结构参数对射流冲量的影响,定义激励器无量纲能量沉积ε和无量纲射流冲量I*,其中ε表激励器腔内气体加热程度,I*表激励器动能转化效率。
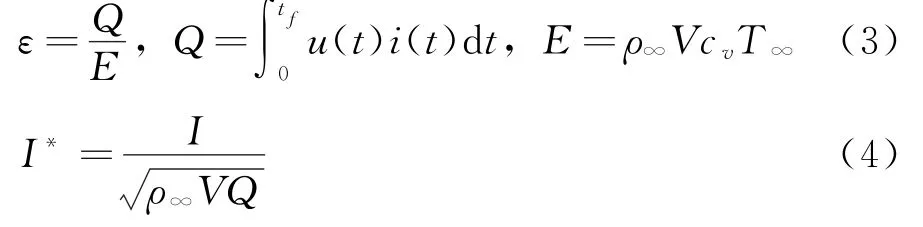
式中Q为放电电弧能量;u(t)为放电电压;i(t)为放电电流;E为腔内气体初始能量;ρ∞为环境密度, 1.225 kg/m3;V为腔体体积;cv为定容比热,717 J/(kg·K);T∞为环境温度,300 K。
本文对不同射流孔径、腔体体积和电极间距激励器的射流流场及其冲量特性进行实验研究。具体实验工况如表1所示。
2.2 射流孔径的影响
图6为放电频率f=1 Hz,环境压强P∞=1 atm条件下三电极等离子体高能合成射流激励器放电的典型电压-电流波形图(整形滤波后)。激励器放电电压、电流均呈振荡衰减的变化趋势,且由于激励器电源为容性电源[8],其放电电路近似等效为一个欠阻尼RLC电路。由图6可知,电极间距4 mm,环境压强1atm,放电电容1.6μF条件下三电极激励器工作击穿电压约为3.5 k V,峰值电流约为3.6 k A,放电时间约为30μs。由式(3)计算可得三电极等离子体高能合成射流激励器放电电弧能量Q=7.9J,且激励器放电电弧能量不随射流孔径变化。
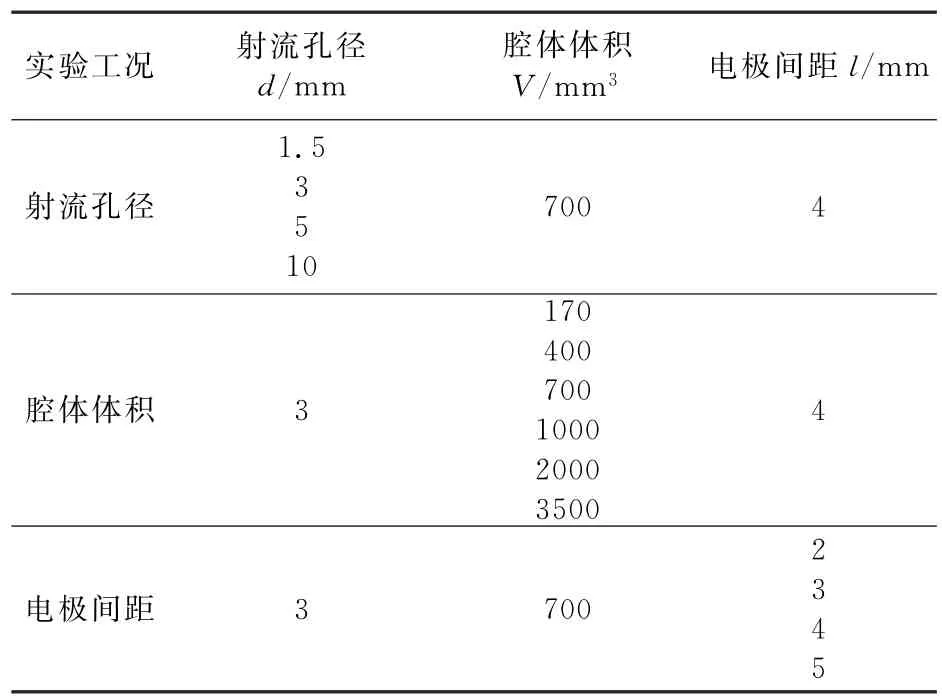
表1 不同激励器结构实验工况参数Table 1 Experimental operating conditions of different geometric actuators
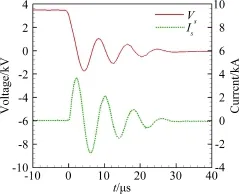
图6 典型放电电压-电流波形图Fig.6 Typical oscillogram of discharge voltages and currents
利用电参数测量装置及单丝扭摆式微冲量测量系统实验测量了三电极等离子体高能合成射流激励器放电电压、电流和单脉冲射流冲量,并通过式(3)、式(4)计算得无量纲能量沉积ε和无量纲射流冲量I*。图7为三电极等离子体高能合成射流激励器无量纲能量沉积ε和无量纲射流冲量I*随激励器射流孔径的变化。由图7和式(3)可知,激励器无量纲能量沉积ε不随射流孔径变化,无量纲射流冲量I*随射流孔径先增大后减小,在射流孔径d=5 mm左右时无量纲射流冲量I*达到最大。表明对于给定ε,激励器存在最优射流孔径,孔径过小会在激励器出口发生堵塞作用,造成射流动量损失;孔径过大则会导致射流速度和射流喷射时间降低,从而造成射流冲量降低[25]。因此在激励器设计时应选择适中的射流孔径。

图7 无量纲能量沉积ε和无量纲射流冲量I*随射流孔径的变化Fig.7 Variation of theεand theI*with orifice diameters
2.3 腔体体积的影响
三电极等离子体高能合成射流激励器放电电弧能量不随激励器腔体体积变化,放电电弧能量Q=7.9J。
图8为放电开始后100μs不同腔体体积激励器的射流流场,可见三电极等离子体高能合成射流呈蘑菇状发展,且在射流锋面上方有一道呈球对称的“前驱激波”。激波强度可由阴影图像中的激波平均密度梯度差等效表示[26],间接反映了激励器腔体内外压比,对于给定环境压强,激波强度越大,腔体内外压比越大,则腔体内外压差越大。不同时刻射流锋面距激励器出口的距离可以反映射流的速度[22]。由图8可知,随激励器腔体体积增加,激波强度和射流锋面距激励器出口的距离降低,即激励器腔体内外压差和射流速度随腔体体积增加而减小。
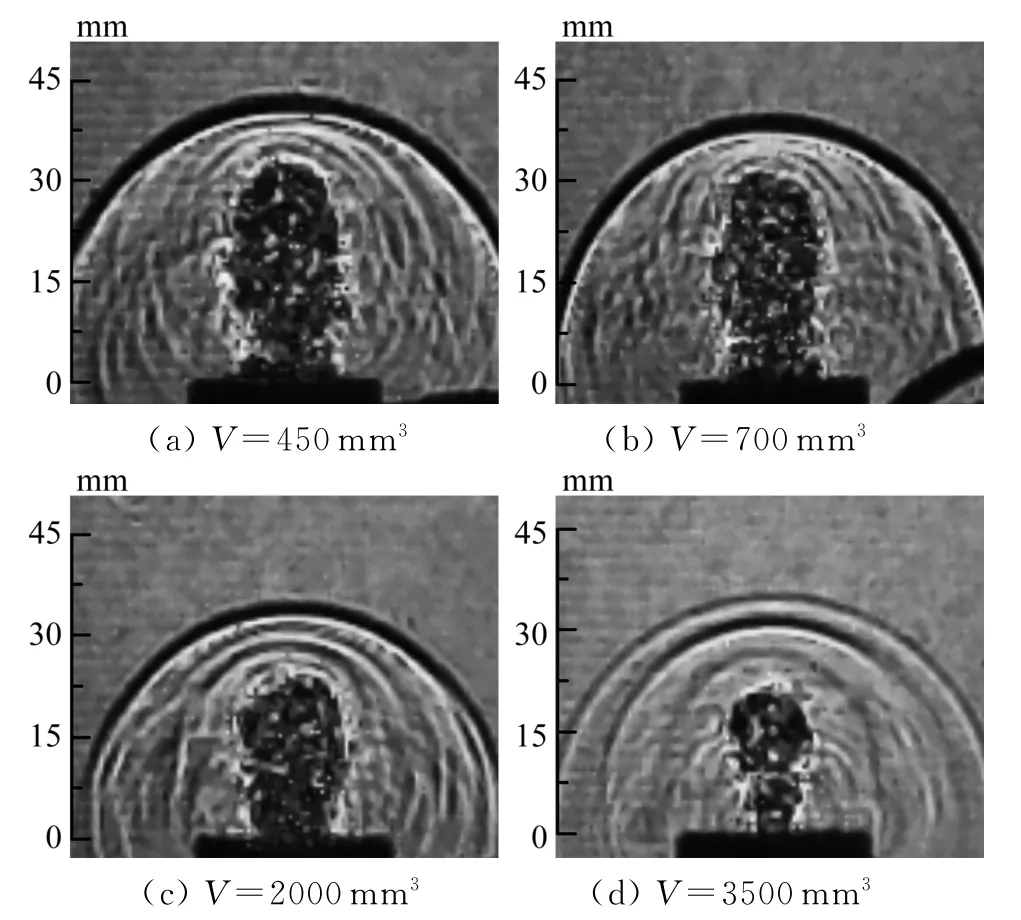
图8 放电开始后100μs不同腔体体积激励器的射流流场Fig.8 Flow field of different cavity volumes at 100μs after the start of the discharge
图9为激励器无量纲能量沉积ε和无量纲射流冲量I*随腔体体积的变化。由图9可知,随激励器腔体体积增加,无量纲能量沉积ε和无量纲射流冲量I*降低,且下降速率逐渐减小。这是由于不同腔体体积条件下激励器放电电弧能量不变,随腔体体积增加,激励器放电电弧加热气体体积增加,单位体积腔内气体受热量减小,腔内气体加热程度降低,无量纲能量沉积ε随腔体体积增加而减小。且随激励器腔体体积增加,腔体内外压差及射流速度降低,无量纲射流冲量I*减小,激励器动能转化效率降低。由图9和式(3)、式(4)可知,I*和ε随腔体体积V的变化趋势一致,表明激励器腔体体积V对射流冲量的影响可以转化为无量纲射流冲量I*随无量纲能量沉积ε的变化关系,激励器腔体体积越小,无量纲能量沉积ε越大,无量纲射流冲量I*越大,激励器动能转化效率越高。因此在激励器设计时应尽量选用小腔体体积。
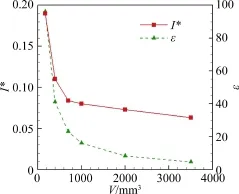
图9 无量纲能量沉积ε和无量纲射流冲量I*随腔体体积V的变化Fig.9 Variation of theεand the I*with cavity volumes V
2.4 电极间距的影响
图10为不同电极间距条件下三电极等离子体高能合成射流激励器放电电压-电流随时间的变化。由图可知,随激励器电极间距增加,放电电压和电流随之增大。

图10 不同电极间距激励器的放电电压-电流波形图Fig.10 Oscillogram of discharge voltages and currents of actuators with different electrode gaps
根据气体击穿的巴申定律:

激励器电极间的击穿电压是环境压强P∞和电极间距l乘积的函数,相同环境压强条件下,电极间击穿电压随激励器电极间距增加,放电电压和电流随之增大。由式(2)计算得电极间距l=2、3、4、5 mm时的激励器放电电弧能量Q分别为1.9J、4.8J、7.9J和10.1J。
图11为三电极等离子体高能合成射流激励器放电开始后100μs不同电极间距激励器射流流场。由图11可知,随激励器电极间距增加,射流前驱激波强度和射流锋面距激励器出口的距离增大,激励器腔体内外压差和射流速度随之增加。
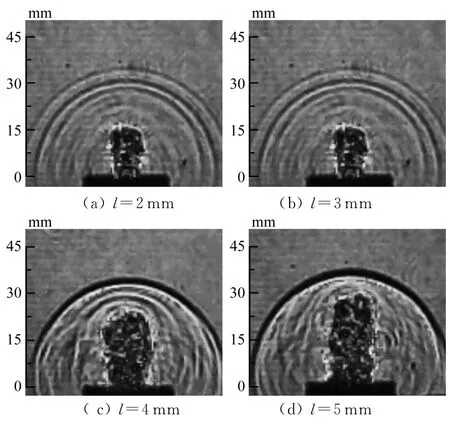
图11 放电开始后100μs不同电极间距激励器的射流流场Fig.11 Flow field of different electrode gaps at 100μs after the start of the discharge
图12为激励器无量纲能量沉积ε和无量纲射流冲量I*随电极间距的变化。由图12可知,随电极间距增加,无量纲能量沉积ε和无量纲射流冲量I*增大。这是由于激励器放电电弧能量随电极间距增加,腔内气体加热量随之增加,相同体积的腔内气体加热程度增加,无量纲能量沉积ε增大。同时激励器腔体内外压差和射流速度随电极间距增加,无量纲射流冲量I*增大,表明激励器动能转化效率随之增加。因此在激励器设计时应尽量增大激励器电极间距。
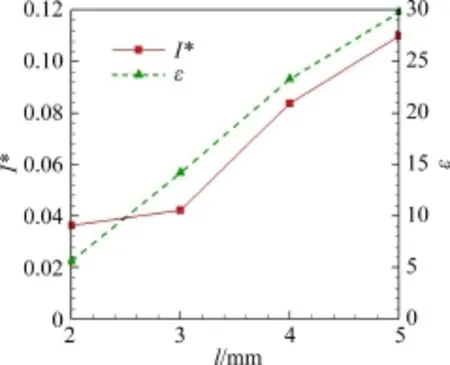
图12 无量纲能量沉积ε和无量纲射流冲量I*随电极间距l的变化Fig.12 Variation of theεand the I*with electrode gaps l
为研究激励器结构对其射流冲量的影响关系,设定激励器初始工况为:环境压强1atm,电极间距l=4 mm,腔体体积V=700 mm3。分别调节激励器腔体体积和电极间距获得无量纲射流冲量I*随无量纲能量沉积ε的变化,如图13所示。由图13可知,不同腔体体积激励器无量纲射流冲量I*随无量纲能量沉积ε增加,但增长速率逐渐降低;不同电极间距激励器无量纲射流冲量I*随无量纲能量沉积ε增加,且增长速率逐渐增加。当无量纲能量沉积ε小于初始工况时,腔体体积对激励器无量射流冲量的影响更显著;当无量纲能量沉积ε大于初始工况时,电极间距对激励器无量纲射流冲量的影响更显著。由图13可知,为维持激励器较好的射流冲量水平,应尽量提高无量纲能量沉积ε,但由式(3)可知,无量纲能量沉积ε受激励器放电电弧能量和环境参数的限制,随激励器工作环境的改变,需根据实际工况重新设计激励器结构。当设计激励器无量纲能量沉积ε小于初始工况时,应保持激励器电极间距与初始工况一致,增大激励器腔体体积使无量纲能量沉积ε降低至设计值;当设计激励器无量纲能量沉积ε大于初始工况时,应保持激励器腔体体积与初始工况一致,增大激励器电极间距使无量纲能量沉积ε增加至设计值。
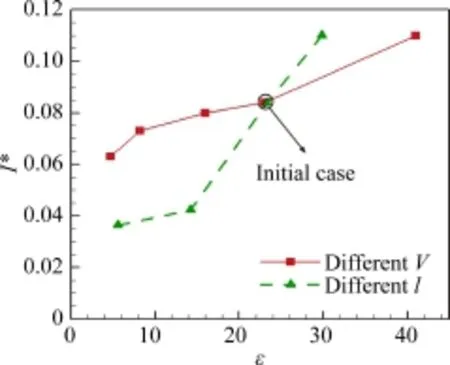
图13 不同腔体体积V和电极间距l条件下I*随ε的变化Fig.13 Variation of the I*with theεfor different V and different l
3 结 论
为设计更高射流冲量的三电极等离子体高能合成射流激励器提供参考依据,本文利用电参数测量装置、高速阴影系统和单丝扭摆式微冲量测量系统对激励器放电电压-电流、流场结构和射流冲量进行了实验测量,实验研究了激励器结构参数对激励器放电特性、射流流场及其冲量特性的影响,主要结论如下:
1)对于给定无量纲能量沉积ε,激励器存在最优射流孔径,本文实验条件下射流孔径d=5 mm左右时无量纲射流冲量I*最大,即在激励器设计时应选择适中的射流孔径。
2)激励器腔体体积增加,无量纲能量沉积ε减少,腔内气体加热程度降低,腔体内外压差和射流速度随之降低,无量纲射流冲量I*减小,激励器动能转化效率降低,在激励器设计时应尽量选用小腔体体积。
3)激励器电极间距增加,无量纲能量沉积ε增加,腔内气体加热程度增大,腔体内外压差和射流速度随之增大,无量纲射流冲量I*增大,激励器动能转化效率升高,在能量范围内激励器设计时应尽量增大激励器电极间距。
4)激励器腔体体积和电极间距对射流冲量的影响可以转化为无量纲射流冲量I*随无量纲能量沉积ε的变化关系。为设计具有较好射流冲量水平的激励器,当设计激励器无量纲能量沉积ε小于初始工况时,应增大初始工况激励器腔体体积使无量纲能量沉积ε降低至设计值;当设计激励器无量纲能量沉积ε大于初始工况时,应增大初始工况激励器电极间距使无量纲能量沉积ε增加至设计值。
[1]Wang J J,Choi K S,Feng L H,et al.Recent developments in DBD plasma flow control[J].Progress in Aerospace Sciences, 2013,62:52-78.
[2]Popkin S H,Cybyk B Z,Land H B.Recent performance-based advances in SparkJet Actuator design for supersonic flow applications[C]//51st AIAA Aerospace Sciences Meeting, Grapevine,Texas,2013.
[3]Wang L,Luo Z B,Xia Z X,et al.Review of actuators for high speed active flow control[J].Science China Technological Sciences,2012,55:2225-2240.
[4]Corke T C,Enloe C L,Wlkihonson S P.Dielectric barrier discharge plasma actuators for flow control[J].Annual Review of Fluid Mechanics,2010,42(1):505-529.
[5]Im S,Do H,Cappelli M.Dielectric barrier discharge control of a turbulent boundary layer in a supersonic flow[J].Applied Physics Letters,2010,97(4).
[6]Kim J,Nishihara M,Adamovich I,et al.Development of localized arcfilament RF plasma actuators for high-speed and high Reynolds number flow control[J].Experiment in Fluids, 2010,49(2):497-511.
[7]Roth J.A study of direct-current surface discharge plasma for a Mach 3 supersonic flow control[D].Austin:The University of Texas at Austin,2007.
[8]Belinger A,Hardy P,Barricau P,et al.Influence of the energy dissipation rate in the discharge of a plasma synthetic jet actuator[J].Journal of Physics D:Applied Physics,2011,44 (36):201-212.
[9]Belinger A,Hardy P,Gherardi N,et al.Influence of the spark discharge size on a plasma synthetic jet actuator[J].IEEE Transactions on Plasma Science,2011,39(11):2334-2335.
[10]Zhou Y,Liu B,Wang L,et al.Numerical simulation of performance characteristics of two-electrode plasma synthetic jet and the influence of different actuator orifice shapes[J]. Acta Aerodynamica Sinica,2015,33(6):799-805.(in Chinese)周岩,刘冰,王林,等.两电极等离子体合成射流性能及出口构型影响仿真研究[J].空气动力学学报,2015,33(6):799-805.
[11]Zhou Y,Liu B,Luo Z B,et al.Numerical simulation of interaction of spark discharge synthetic jet with supersonic flow [J].Acta Aerodynamica Sinica,2016,34(4):511-516.(in Chinese)周岩,刘冰,罗振兵,等.火花放电合成射流与超声速来流相互干扰特性数值模拟研究[J].空气动力学学报,2016,34(4): 511-516.
[12]Nie W S,Cheng Y F,Che X K.A review on Dielectric Barrier Discharge plasma flow control[J].Advances in Mechanics, 2012,42(6):722-734.(in Chinese)聂万胜,程钰锋,车学科.介质阻挡放电等离子体流动控制研究进展[J].力学进展,2012,42(6):722-734.
[13]Wang J,Li Y H,Cheng B Q,et al.The mechanism investigation on shock wave controlled by plasma aerodynamic actuation[J].Acta Phys.Sin,2009,58(8):5513-5519.(in Chinese)王健,李应红,程邦勤,等.等离子体气动激励控制激波的机理研究[J].物理学报,2009,58(8):5513-5519.
[14]Wang J,Li Y H,Cheng B Q,et al.Experimental investigation on shock wave control by plasma aerodynamic actuation[J]. Acta Aeronautica et Astronautica Sinica,2009,30(8):1374-1379.(in Chinese)王健,李应红,程邦勤,等.等离子体气动激励控制激波的实验研究[J].航空学报,2009,30(8):1374-1379.
[15]Grossman K,Cybyk B,Rigling M.SparkJet actuators for flow control[J].Sparkjet Actuators for Flow Control,2007:1-9.
[16]Haack S J,Taylor T M.Experimental estimation of SparkJet efficiency[R].AIAA 2011-3997.
[17]Wang L,Xia Z X,Luo Z B,et al.A three-electrode plasma synthetic jet actuator for high speed flow control[J].AIAA Journal,2014,52(4):879-882.
[18]Hardy P,Barricau P,Belinger A.Plasma synthetic jet for flow control[R].AIAA 2010-5103.
[19]Wang L,Luo Z B,Xia Z X,et al.Energy efficiency and performance characteristics of plasma synthetic jet[J].Acta Phys Sin,2013,62(12):125207.(in Chinese)王林,罗振兵,夏智勋,等.等离子体合成射流能量效率及工作特性研究[J].物理学报,2013,62(12):125207.
[20]Cybyk B,Simon D,Land H.Experimental characterization of a supersonic flow control actuator[C]//44th AIAA Aerospace Sciences Meeting and Exhibit,2006:478.
[21]Wang L,Luo Z B,Xia Z X,et al.A fast-response direct-force generation device[P].ZL201210491228.6.(in Chinese)王林,罗振兵,夏智勋,等.一种快响应直接力产生装置[P]. ZL201210491228.6.
[22]Wang L,Luo Z B,Xia Z X,et al.Effect of pressure on the performance of plasma synthetic jet actuator[J].Science China,2014,57(12):2309-2315.
[23]Zhang Y,Luo Z B,Wang L,et al.A single line torsion pendulum for fast-response force and micro-impulse measurementing[P].201410325996.3.(in Chinese)张宇,罗振兵,王林,等.一种单丝扭摆式快响应直接力及微冲量测量装置[P].201410325996.3.
[24]Zhang Y,Luo Z B,Wang L.A single line torsion pendulum system for micro-impulse measurementing and its calculating method[C]//2014 Rocket propulsion Technology Academic Meeting.Jiangxi:2014.(in Chinese)张宇,罗振兵,王林.一种单丝扭摆式微冲量测量系统及其计算方法[C].2014年火箭推进技术学术年会.江西,宜春:2014.
[25]Zhang Y.Study on fast-response direct force technology based on high energy synthetic jet[D].Changsha:National University of Defense Technology,2014.(in Chinese)张宇.基于等离子体高能合成射流的快响应直接力技术研究[D].长沙:国防科学技术大学,2014.
[26]Dawson R,Little J.Characterization of nanosecond pulse driven dielectric barrier discharge plasma actuators for aerodynamic flow control[J].Appl.Phys.,2013,113(10): 103302-103311.
Effect of geometric parameters on the flow field and impulse of three-electrode plasma high-energy synthetic jet actuator
Zhang Yu1,Luo Zhenbing1,*,Li Haipeng2,Wang lin1,Xia Zhixun1
(1.College of Aerospace Science and Engineering,National University of Defense Technology,Changsha410073,China; 2.China Defense Science and Technology Information Center,Beijing100142,China)
Plasma actuators have been become the research focus in flow control and fluid dynamic fields because of the advantages of simplicity,fast response and robustness.Compared with typical two-electrode actuator,three-electrode Plasma Synthetic Jet Actuator(TE-PSJA) possesses the advantages of higher energy efficiency and bigger jet impulse,and has potential to be adopted as a fast-response direct force generation device.In order to reveal the effects of geometric parameters on the flow field and impulse,discharge characteristic,flow field and impulse of TE-PSJA with different orifices,volumes and electrode gaps were experimentally studied using electric parameter measurement device,high-speed shadowgraphy and single line torsion pendulum system.In order to compared the working characteristics of the actuator in different conditions,dimensionless energy depositionεand dimensionless jet impulseI*were defined,and the effects of geometric parameters onεandI*were analyzed.Results showed thatthe best jet orifice diameter is existed,εand I*decreases as volumes increase,but increases as electrode gaps increase,strength and affected area of the jet decrease as volumes increase,while increase as electrode gaps increase.A similar flow structure which contains a mushroom-shaped jet and a spherically symmetric precursor shock above the jet front was observed.Compared with the variation of I*withεon the different volumes and electrode gaps conditions,it can be concluded that in order to design actuators which possessed better jet impulse level,the dimensionless jet impulse I*should be increased as possible with the sameε.The cavity volume should be increased so as the dimensionless energy depositionεis to be the design value when the dimensionless energy deposition is less than the initial case.On the contrary,the electrode gaps should be increased so as the dimensionless energy depositionεbe the design value when the dimensionless energy deposition is larger than the initial case.
plasma synthetic jet;high speed shadowgraph;single line torsion pendulum; geometric parameters;active flow control;energy deposition;jet impulse;jet flow field
V211.1
Adoi:10.7638/kqdlxxb-2015.0002
0258-1825(2016)06-0783-07
2015-01-05;
2015-05-20
国家自然科学基金(11372349);全国优秀博士论文作者专项资金(201058);国防科技大学杰出青年基金(CJ110101)
张宇(1990-),男,吉林长春人,硕士研究生,研究方向:等离子体高能合成射流.E-mail:zhangyu_nudt@126.com
罗振兵*(1979-),男,湖北黄石人,教授,研究方向:主动流动控制.E-mail:luozhenbing@163.com
张宇,罗振兵,李海鹏,等.激励器结构对三电极等离子体高能合成射流流场及其冲量特性的影响[J].空气动力学学报,2016,34 (6):783-789.
10.7638/kqdlxxb-2015.0002 Zhang Y,Luo Z B,Li H P,et al.Effect of geometric parameters on the flow field and impulse of three-electrode plasma high-energy synthetic jet actuator[J].Acta Aerodynamica Sinica,2016,34(6):783-789.
