混合动力车辆自动机械变速器换挡过程分析与控制*
2016-04-11沈文臣胡宇辉席军强陈慧岩
沈文臣,胡宇辉,席军强,陈慧岩
(1.北京理工大学机械与车辆学院,北京 100081; 2.北京理工大学智能车辆研究所,北京 100081)
2016054
混合动力车辆自动机械变速器换挡过程分析与控制*
沈文臣,胡宇辉,席军强,陈慧岩
(1.北京理工大学机械与车辆学院,北京 100081; 2.北京理工大学智能车辆研究所,北京 100081)
基于“虚拟离合器”技术的自动机械变速器换挡过程的关键是动力中断过程中电机的主动同步与执行机构的挂挡控制。通过对自动机械变速器中同步器的接合机理分析,提出一种基于电机转矩控制的变速器输入端主动同步方法,即通过电机的转矩输出取代传统同步器依靠换挡力产生的同步摩擦力矩来消除进挡过程中同步器主从动部分的转速差。试验验证的结果表明,基于电机转矩控制的自动机械变速器换挡过程控制方法可以降低同步器的磨损,缩短动力中断的时间,提高进挡成功率与可靠性。
混合动力车辆;机械自动变速器;换挡过程;转矩控制
前言
目前,石油短缺已成为最严重的世界性问题之一[1];传统车辆产生较多的温室气体很难满足日益严格的环保法规[2]。近年来,国内外新能源汽车的蓬勃发展为解决上述问题提供了良好的手段,同时,也对新能源汽车零部件产业带来新的机遇和挑战[3]。混合动力车辆作为新能源车辆中的一员,被公认为现阶段或不久的将来是传统车辆最实际而高效的替代者。
单轴并联混合动力汽车动力传动系统比传统汽车复杂,多种动力源的耦合对传动系统的控制提出更高的要求。国内外众多研究人员对其广泛关注。文献[4]中提出基于电机转速控制的机械自动变速器不分离离合器换挡控制方法,可有效提高换挡品质。文献[5]中提出通过协调换挡过程中电机同步和机械同步来优化换挡时间、保证换挡的鲁棒性。文献[6]中提出应用于电动车辆无离合器换挡的优化控制方法,包括模型参数识别、换挡过程中的转速同步控制和换挡执行机构的运动控制。文献[7]中基于遗传算法优化混合动力车辆的变速器速比和换挡控制策略,提高车辆的燃油经济性、降低车辆的排放。文献[8]中提出适用于插电式混合动力汽车的机械自动变速器动态协调控制方法。文献[9]中提出在换挡过程中利用ISG电机的辅助作用的换挡品质控制策略,减小了AMT的换挡冲击,缩短动力中断时间。文献[10]中采用动力协调控制方法缩短换挡过程动力中断时间、减小同步器和离合器的磨损,并通过实车试验证明了该控制方法的有效性。总之,上述辅助换挡策略中,大部分都是利用电机的转速控制来缩短同步时间,降低同步器的磨损。但大量的试验表明,转速控制在某些未知情况下不足以保证变速器挂挡成功。
本文中对混合动力传动系统中的自动机械变速器进挡过程进行研究,提出基于电机转矩控制的挂挡策略,以降低换挡过程中同步器的磨损,缩短动力中断的时间,提高挂挡成功率和可靠性。首先,介绍所研究的混合动力车辆机械自动变速器的换挡过程阶段划分;其次,对换挡过程中同步和挂挡阶段进行了详细分析,阐述了同步器顺利啮合的机理;随后,针对混合动力车辆机械自动变速器的结构特点,提出基于电机转矩控制的挂挡过程优化控制方法;最后,通过实车试验对提出的控制方法进行验证。
1 混合动力系统
1.1 系统介绍
本文中研究的混合动力系统结构简图如图1所示,主要包括天然气发动机、自动离合器、永磁同步电机、机械自动变速器、动力电池和各部件的控制系统。

图1 混合动力系统结构简图
1.2 换挡过程
基于“虚拟离合器”技术的单轴并联混合动力系统机械自动变速器换挡过程包含卸载、摘挡、同步、挂挡和转矩恢复5个阶段[11],如图2所示。其中,同步和挂挡阶段主要是同步器的接合过程,涉及动力源与换挡执行机构的协调控制。如果这一过程控制不当,会导致挂挡失败或挂挡时间过长,甚至导致同步器损坏。
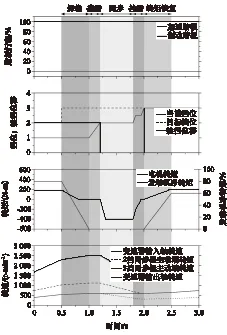
图2 机械自动变速器换挡过程(2挡升3挡)示意图
2 同步和挂挡阶段的分析
2.1 同步器结构
常见的博格华纳单锥面锁环式同步器包括接合套、锁环、接合齿圈、花键毂、滑块和弹簧等主要部件。其装配剖面图和局部放大图如图3所示。

图3 同步器系统装配剖视图与局部放大图
2.2 同步器啮合过程
同步器从中位锁止位置到完全啮合过程细化为以下7个阶段。
2.2.1 第一次自由轴向运动
同步器处于空挡位置时,接合套在定位滑块和弹簧的作用下保持中间位置。接合套在换挡力作用下,推动滑块和锁环向目标挡位方向轴向运动,快速消除滑块与锁环、锁环内摩擦锥面与接合齿圈外摩擦锥面之间的间隙,如图4中d1和d2。

图4 同步器中位位置尺寸示意图
此阶段接合套在换挡力作用下的轴向位移为
D1=d1+d2sinα
(1)
式中α为锁环内摩擦锥角。
2.2.2 预同步阶段
接合套在换挡力的作用下脱离定位滑块,使接合套齿与锁环齿相抵触,保持正确的锁止相位,如图5所示。

图5 锁止位置结合齿相位关系图

图6 锁环齿尺寸示意图
接合套的轴向位移为
(2)
式中:d为锁环齿的宽度;β为锁环齿的角度,如图6所示。
锁环齿的宽度为
(3)
式中:dc为锁环齿的平均有效直径;n为锁环的齿数。
2.2.3 转速同步阶段
接合套在换挡力的作用下有继续做轴向运动的趋势,压迫锁环使锁环内锥面与接合齿圈外锥面间产生同步摩擦力矩。同步器锁环齿与接合套齿齿面接触处于锁止位置的示意图如图7所示。
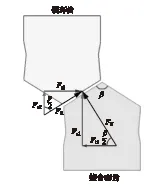
图7 同步器处于锁止位置受力示意图
在换挡力的作用下,锁环齿受到接合套齿的挤压,从而在接触面处产生垂直于接触面的法向正压力FN和平行于接触面的切向摩擦力FR。切向摩擦力与法向正压力的关系为
FR=μs·FN
(4)
式中μs为接触面的滑动摩擦因数。
作用于锁环的拨环合力为
(5)
作用于锁环的轴向压紧合力为
(6)
因此由拨环合力Ft产生的拨环力矩Tt为
(7)
锁环内摩擦锥面在换挡力作用下产生的同步摩擦力矩Tf为
(8)
式中:j为摩擦面数;di为锁环内摩擦锥面有效直径;μ为锁环内摩擦锥面滑动摩擦因数。
与传统车辆相比,基于“虚拟离合器”技术的混合动力车辆换挡过程控制中同步器输入端的惯量和内部摩擦阻力矩大得多,因此单纯依靠摩擦锥面产生的同步摩擦力矩来实现同步器主从动端转速的一致,不仅无法保证换挡时间的要求,而且会导致同步器的磨损加剧。
通过对电机的转矩控制使电机输出一定的力矩(正向或负向)替代锁环在换挡力作用下产生的同步摩擦力矩,解决混合动力系统换挡过程中同步器同步力矩不足的问题。电机转矩控制过程中同时配合执行机构的运动控制。
2.2.4 同步完成拨环阶段
同步完成拨环开始阶段接合套齿、锁环齿与接合齿圈齿的相位关系如图5所示。
同步器主从动部分转速一致以后,锁环齿内摩擦锥面与接合齿圈外摩擦锥面间的滑动摩擦力矩变为静摩擦力矩。此时,接合套齿继续在轴向换挡力的作用下,拨动同步器从动端前进或倒退半个齿宽的角度。
2.2.5 第二次自由轴向运动
拨环阶段完成以后,接合套齿与锁环齿不再抵触,换挡力推动接合套继续自由轴向运动,直至接合套齿与接合齿圈齿接触。
2.2.6 二次冲击阶段
接合套齿穿越锁环完成自由轴向运动以后,具有一定的轴向速度。在这一阶段初始时刻,接合套齿与接合齿圈齿的相位关系如图8所示。在图8(a)所示接合套齿处于接合齿圈相邻齿的正中间位置时,接合套在轴向运动过程中不会产生二次冲击。在图8(b)所示接合套齿与接合齿圈齿处于顶尖位置时,在同样的换挡力作用下会产生最大的二次冲击。图8(c)为二次冲击阶段接合套齿与接合齿圈齿的一般相位关系,接合套同样需要在换挡力的作用下拨动目标挡位齿轮前进或后退半个齿宽的角度,以便顺利进入最后自由轴向运动阶段。

图8 二次冲击初始阶段接合套齿与锥齿间相位关系
2.2.7 最后自由轴向运动
这是同步器接合过程的最后一个阶段。接合套在换挡力的作用下可以很容易地完成这一阶段的自由轴向运动。
3 挂挡过程优化控制
混合动力传动系统利用对电机的主动控制来实现机械自动变速器换挡过程中同步和挂挡阶段目标挡位的啮合是实现不分离离合器换挡的关键。目前这一控制过程中多采用电机转速控制,而转速跟踪控制的精度和动态响应的时间难以保证同步器的顺利啮合。据此,本文中提出一种基于电机转矩控制的机械自动变速器换挡过程优化控制方法,其流程图见图9。
沟通和合作能力培养有待进一步加强 班级授课形式注重讲授,学生之间、学生与教师之间沟通交流机会少。模式化的教学实践难以适应学生个体差异性,学生之间的团队合作意识和沟通意愿不足;难以适应创新型国家建设对劳动者团队精神、协作意识等创新能力的要求。
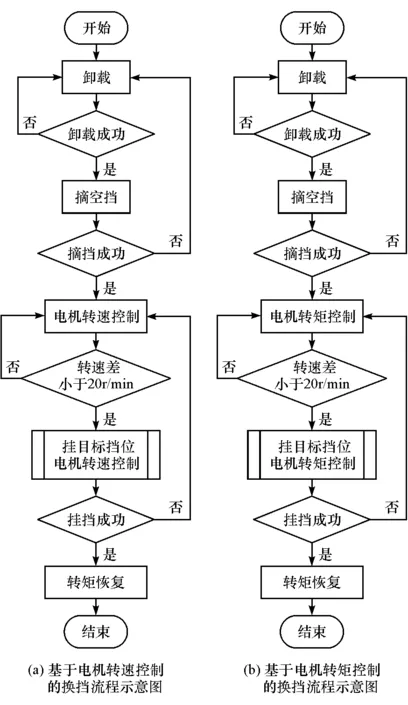
图9 机械自动变速器换挡过程控制流程图
3.1 挂挡过程电机转速控制
采用电机转速控制的主动同步过程的一般流程如图9(a)所示。
电机转速控制模式由电机控制器内部的转速调节闭环模块实现,如图10所示。由用户发送给电机目标转速,控制器调节电机输出一定力矩去跟踪此目标转速。当目标转速与实际转速存在一定偏差时,电机控制器会输出一定的正负转矩使其维持到目标转速。实车测试过程中,传动系统的转速波动和CAN总线信号的传输延迟,导致电机的转速跟踪效果总是滞后于目标转速信号。这一微小的转速信号偏差的存在,导致同步器主从动部分的转速不一致而无法顺利啮合。

图10 电机转速控制示意图
3.2 挂挡过程电机转矩控制
换挡过程中电机转矩控制的示意图如图11所示,电机的转矩响应速度和精度要远大于转速响应。由TCU采集的变速器输入轴转速、输出轴转速和目标挡位确定电机需要输出的目标转矩。
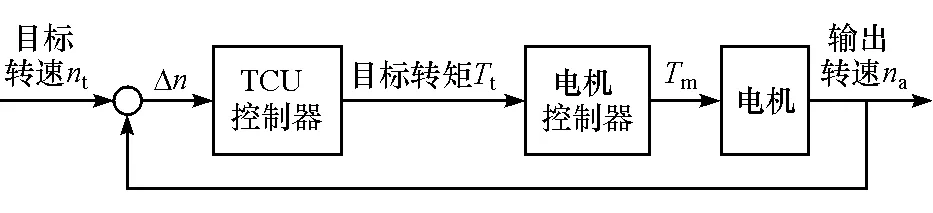
图11 电机转速控制示意图
电机目标转矩的确定准则为
(9)
式中:Δ为正数,取决于开始挂挡时刻电机目标转速与实际转速的差值;nt为输入轴目标转速;na为输入轴当前转速;Tmax(ωm)和Tmin(ωm)分别为电机当前转速下的最大和最小输出转矩。
Tsyn=Tt+Tf
(10)
式中Tt和Tf的符号与同步器主从动端的转速差的符号一致。由于|Tsyn|≥|Tf|>|Tt|,在同步器主从动端未同步以前,同步器处于同步锁止位置。同步完成以后,Tt>Tsyn=0,同步器主动端在由换挡力产生的拨环力矩Tt作用下,旋转半个齿宽的角度,完成进挡动作。
4 实车试验验证
基于电机转矩控制的AMT换挡过程的验证在一辆混合动力客车上进行,如图12所示。其关键零部件和AMT的参数如表1所示。
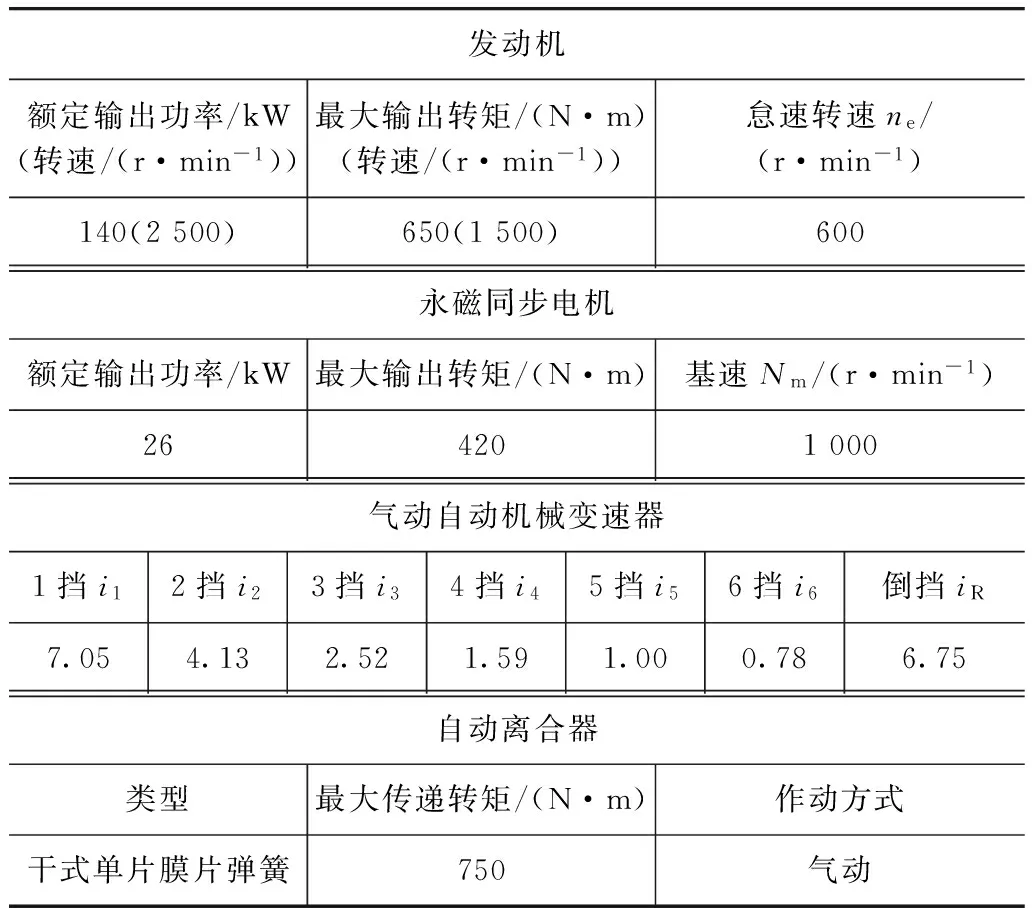
发动机额定输出功率/kW(转速/(r·min-1))最大输出转矩/(N·m)(转速/(r·min-1))怠速转速ne/(r·min-1)140(2500)650(1500)600永磁同步电机额定输出功率/kW最大输出转矩/(N·m)基速Nm/(r·min-1)264201000气动自动机械变速器1挡i12挡i23挡i34挡i45挡i56挡i6倒挡iR7.054.132.521.591.000.786.75自动离合器类型最大传递转矩/(N·m)作动方式干式单片膜片弹簧750气动
4.1 连续升挡试验
该试验工况为100%油门开度下,车辆由静止起步持续加速至最高车速。其中变速器挡位由1挡连续升至6挡。具体试验曲线由图13所示,图13(d)为2挡升3挡过程中电机转矩控制的放大图。由图13(d)可见:2挡挡位脱开至空挡以后,TCU发送给电机的目标制动转矩为最大值,此阶段电机的实际输出转矩受电机本身特性及电池供电的影响,只能输出对应电机转速下的最大转矩;当变速器输入轴转速与目标转速的差值小于200r/min后,电机的目标转矩值与转速差成正比;当转速差小于20r/min以后,执行机构开始施加换挡力促使3挡的同步器啮合,完成2挡换3挡。整个换挡过程中动力中断的持续时间为0.8s。

图13 连续升挡试验曲线
4.2 连续降挡试验
该试验工况为油门关闭,车辆由最高车速逐渐减速至静止状态。其中变速器挡位由6挡连续降至1挡,具体试验曲线由图14所示。4挡降3挡过程中电机转矩控制的放大图如图14(d)所示,由图可见:4挡挡位脱开至空挡以后,TCU发送给电机的目标输出转矩为最大值,随着变速器输入轴转速与目标转速的差值逐步减小,电机的目标输出转矩也逐步降低;4挡降3挡过程中,动力中断的时间约为0.7s。

图14 连续降挡试验曲线
4.3 挂挡过程中电机控制的对比
混合动力客车机械自动变速器挂挡过程中电机转速控制的对比试验如图15所示。
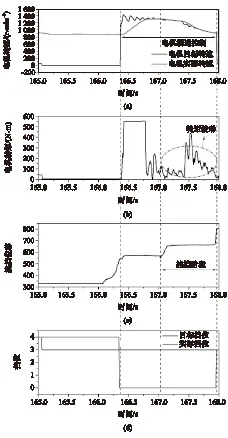
图15 4挡降3挡过程中电机转速控制
由图15(a)可见,摘空挡以后电机采用转速控制调节变速器输入轴主动跟踪变速器输出轴转速,当两者的转速差小于10r/min以后,执行机构开始动作,使3挡的同步器完成接合。而在进挡过程中,由于电机采用速度环控制,目标转速的微小变动导致电机输出较大的转矩来克服转速的波动(图15(b))。基于前述同步器的接合过程分析,电机输出的这一转矩有可能成为同步器前进过程中的阻力,延长进挡时间或导致挂挡失败。从图15(c)中可以看出,同步器完成接合的时间约为0.8s,比图14中的0.6s长。因此,换挡过程中采用电机转矩控制,可使电机输出可控的较小转矩,以消除同步器主从动端的转速差,顺利完成进挡操作。
5 结论
通过对传统车辆机械自动变速器中同步器接合机理的分析,提出一种适用于混合动力车辆中电机辅助自动机械变速器换挡过程的转矩控制方法。该方法不仅可以大大降低换挡过程中同步器的磨损,提高同步器的使用寿命;而且可以降低换挡过程中同步器主动端的同步时间,缩短动力中断的时间。而且相比于目前混合动力系统中主动同步过程应用较多的电机转速控制,基于电机转矩控制的自动变速器挂挡成功率与可靠性更高。
[1] International Energy Statistics: Consumption of Motor Gasoline[EB/OL]. Energy Information Administration[2015-06-09]. http://www.eia.gov/beta/international/rankings/.
[2] 何卉,BANDIVADEKAR A.从中、美、欧盟2020-2025乘用车油耗标准严格程度与中美节油技术比较看中国2020年新乘用车平均油耗标准的可行性[R].北京:国际清洁交通委员会,2013:1-18.
[3] 姚娥,常分田,郑卜祥.新能源汽车零部件供应商发展方式探讨[J].现代商贸工业,2012,24(9):27-29.
[4] YU H L, XI J Q, ZHANG F Q, et al. Research on Gear Shifting Process Without Disengaging Clutch for a Parallel Hybrid Electric Vehicle Equipped with AMT[J]. Mathematil Problemsin Engineering,2014,16(3).
[5] ZITO G. AMT Control for Parallel Hybrid Electric Vehicles[M]. Proceedings of the FISITA 2012 World Automotive Congress. Springer Berlin Heidelberg,2013:457-468.
[6] YU C H, TSENG C Y. Research on Gear-change Control Technology for the Clutchless Automatic-Manual Transmission of an Electric Vehicle[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering,2013,227(10):1446-1458.
[7] MONTAZERI-GH M, POURBAFARANI Z. Simultaneous Design of the Gear Ratio and Gearshift Strategy for a Parallel Hybrid Electric Vehicle Equipped with AMT[J]. International Journal of Vehicle Design,2012,58(2):291-306.
[8] HE H W, LIU Z T, ZHU L M, et al. Dynamic Coordinated Shifting Control of Automated Mechanical Transmissions Without a Clutch in a Plug-in Hybrid Electric Vehicle[J]. Energies,2012,5(8):3094-109.
[9] 叶明,秦大同,刘振军.轻度混合动力AMT系统换挡品质控制[J].机械工程学报,2009,45(5):108-114.
[10] 廖承林,张俊智,卢青春.混合动力轿车机械式自动变速器换挡过程中的动力系统协调控制方法[J].机械工程学报,2005,41(12):37-41.
[11] 沈文臣,胡宇辉,于会龙,等.基于“虚拟离合器”的混合动力车辆AMT换挡过程控制[J].机械工程学报,2014,50(18):108-117.
Analysis and Control of the Shifting Process of AMT in HEV
Shen Wenchen, Hu Yuhui, Xi Junqiang & Chen Huiyan
1.SchoolofMechanicalEngineering,BeijingInstituteofTechnology,Beijing100081;2.ResearchCenterofIntelligentVehicle,BeijingInstituteofTechnology,Beijing100081;
The keys to the shifting process of automatic mechanical transmission (AMT) based on “virtual clutch” technology are the active synchronization of motor and the shift-in control of actuator in the process of power interruption. Through an analysis on the engagement mechanism of AMT synchronizer, an active synchronization method of transmission input shaft based on motor torque control is proposed, in which the synchronous friction torque generated by shifting force in traditional synchronizer is replaced by motor output torque to eliminate the rotation speed difference between the driving and driven parts of synchronizer. Finally the results of verification test show that the AMT shifting control method based on motor torque control can reduce the wear of synchronizer, shorten the time of power interruption and enhance the success rate and reliability of up shifting.
hybrid electric bus; AMT; shifting process; torque control
*国家自然科学基金青年基金(51505029)资助。
原稿收到日期为2015年6月23日,修改稿收到日期为2015年8月31日。
