基于组合特征和SVM的HRRP目标识别
2016-04-09韩萍孙亚萍
韩萍,孙亚萍
(中国民航大学智能信号与图像处理天津市重点实验室,天津 300300)
基于组合特征和SVM的HRRP目标识别
韩萍,孙亚萍
(中国民航大学智能信号与图像处理天津市重点实验室,天津300300)
摘要:给出了一种基于组合特征和支持向量机(support vector machine,SVM)的雷达高分辨一维距离像(high range resolution profile,HRRP)目标识别方法。该方法首先提取非相干平均距离像与中心矩特征,然后将两种特征串行组合成新的特征,最后采用SVM分类器进行识别。根据美国运动和静止目标获取与识别(moving and stationary target acquisition and recognition,MSTAR)实测SAR HRRP数据进行实验,结果表明在方位角未知的情况下,能够明显提高目标的识别率,是一种有效的HRRP目标识别方法。
关键词:高分辨率一维距离像;组合特征;SVM;目标识别
宽带雷达获取的HRRP不仅包含较精细的目标结构特征,而且可以反映目标散射点沿距离方向的分布情况,对目标识别提供了重要的细节信息,因此,HRRP目标识别一直是雷达自动目标识别(automatic target recognition,ATR)研究领域的热点[1-2]。目前国内外学者对HRRP目标识别方法进行了大量的研究和探索。其中基于单一特征的HRRP目标识别,如基于平均距离像[3-4],基于中心矩[5-6]等单特征提取方法对目标方位变化具有很好的稳健性,而且具有平移不变性,解决了HRRP平移敏感性,因而常作为目标识别的典型特征。但对于任一目标来说,单特征不足以全面反映目标的本质特征,需要从多角度多特征分析目标。文献[7-8]通过提取目标的多个特征进行目标识别。实验证明,与单特征相比,多特征的提取不仅能充分反映目标特征,提高目标的识别率,同时具有推广能力并增强识别结果的鲁棒性。
对于多特征融合的一种简单融合方式是将多种特征组合成联合特征矢量。文献[9]针对联合特征矢量提出一种最近邻模糊分类器。该分类器对输入的各种不同特征类型和衡量尺寸没有一致性要求,也无需对组合特征矢量做任何预处理,并且具有对单类特征进行处理的功能,但是最近邻模糊分类器存在的主要问题是它依赖于目标方位,即在目标方位已知的情况下,目标识别率相对于未利用方位信息时的识别率高,这对实际应用有一定的局限性。
因此,针对特征提取和分类器的设计问题,本文提出了基于非相干平均距离像与中心矩特征组合构成新特征,并联合SVM分类器[10]的目标识别方法。并对文献[11]基于中心矩单特征和最近邻模糊分类器目标识别方法做出比较。实验采用MSTAR数据进行验证,结果证明相对于文献[11]中心矩单特征,本文将非相干平均距离像与中心矩进行组合,起到互补作用,从而更全面地表征目标本质特征,提高目标识别率。而且SVM分类器比文献[11]中最近邻模糊分类器有优势,在未利用目标方位信息的情况下,仍能取得很好的识别效果。
1 HRRP特征提取
1.1非相干平均距离像
文献[3]指出HRRP方位敏感性主要表现为峰值幅度的随机起伏。即将一定方位内的距离像通过非相干平均得到的平均距离像对目标方位变化具有良好的稳健性,可以表征该方位区域的目标特性。

其中

其中:F(·)表示对信号作傅里叶变换。
1.2中心矩特征
中心矩是一种简单的平移不变特征,其反映目标的形状信息,常用于提取图像的平移不变特征[5]。对于一维HRRP,由于散射点模型变化相对缓慢,HRRP峰值位置变化也是一缓变过程,HRRP的方位敏感性主要表现为峰值幅度的变化。对距离像幅度归一化后,则峰值位置相近的距离像具有相似的形状信息。因此可把中心矩作为HRRP模式识别的特征。
设x∈Rm为距离像,x(n)为该距离像各维特征。假设幅度已归一化,则该距离像的p阶中心矩为


假设训练样本集包含c类目标,每类目标有Ni帧,每帧中包含有Ki个距离像,i= 1,2,…,c,则训练集中共有个距离像。训练样本集中心矩特征表示为R = [F1,F2,…,FQ],其中Fl表示训练集中每个距离像的中心矩向量特征,l= 1,2,…,Q。
由于中心矩的幅度随阶数增加急剧递增,各阶中心矩在欧氏特征空间中的权重不同,从而影响分类的准确性。为了消除量纲影响,对中心矩特征作极差变换,变换后特征空间中的各维都具有相同的权重。记变换后的中心矩特征为


随着中心矩阶数的递增,其所含信息的冗余性越大,计算量也越大,故一般选取2~6阶中心矩特征。
2 本文算法
将提取到的频域非相干距离像与中心矩特征组合构成新的特征,利用SVM分类器进行识别。图1给出了算法框图。

图1 算法框图Fig.1 Algorithm flow chart
2.1训练过程
步骤1预处理
1)对样本集XT取模值,并幂变换YT=(XT)v,使得变换后的HRRP近似服从类高斯分布[13-14]。
2)对幂变换后所有HRRP进行能量归一化处理。由于相邻样本之间存在一定的直流漂移,所以还需去除直流漂移[3]得到预处理后的训练样本集为X^。
步骤2特征提取
1)先根据式(1)、式(2)求出各类目标各帧时域非相干距离像和频域非相干距离像
2.2识别过程
3 实验结果及分析
3.1实验数据介绍
本实验数据是由美国DARPA /AFRL MSTAR工作组提供的实测SAR地面静止目标数据。这些目标包括9类不同的军民用车辆目标T72、BMP2、BTR70、BRDm2、BTR60、D7、T62、ZIL131和ZSU234。所有目标HRRP方位范围为[0°~360°]。实验中,将俯仰角为17° 的HRRP作为训练样本,俯仰角为15°的HRRP用于测试,其中假设方位角已知。
实验分2组数据,第1组包括3类目标:T72、BMP2、BTR70;第2组包括上述9类目标。图2给出了所有数据的可见光图像,图3给出了所有目标分别在俯视角17°、30°方位角下的HRRP,表1列出所有目标训练样本数与测试样本数。
3.2实验结果
表2和表3给出了本文的算法结果。其中表2是利用3类目标进行的实验,表3则是利用所有目标进行实验。实验中幂变换指数v= 0.1,SVM选用的核函数是高斯径向基,经过多次实验选择最优结果对应的核参数γ= 8。
3.3结果分析
为了分别验证多特征和SVM识别效果,本文通过4种组合方式进行目标识别。第1种是算法文献[11],即中心矩单特征与最近邻模糊分类器利用目标方位信息进行识别;第2种是选用组合特征与最近邻模糊分类器在利用目标方位信息条件下进行识别;第3种是选用组合特征与最近邻模糊分类器在未利用目标方位信息条件下进行识别;第4种选用本文算法,即组合特征和SVM算法在未利用方位信息条件下进行识别。需要说明的是方位信息的利用是指在目标方位信息已知的情况下,基于在一定方位内,HRRP之间具有很大的相似性,则相对应提取的特征同时也更相似的基础上,选取与测试样本方位左右间隔6°范围内的训练样本的特征作为训练模板,然后对测试样本利用分类器进行识别。各算法识别结果的比较如表4所示。
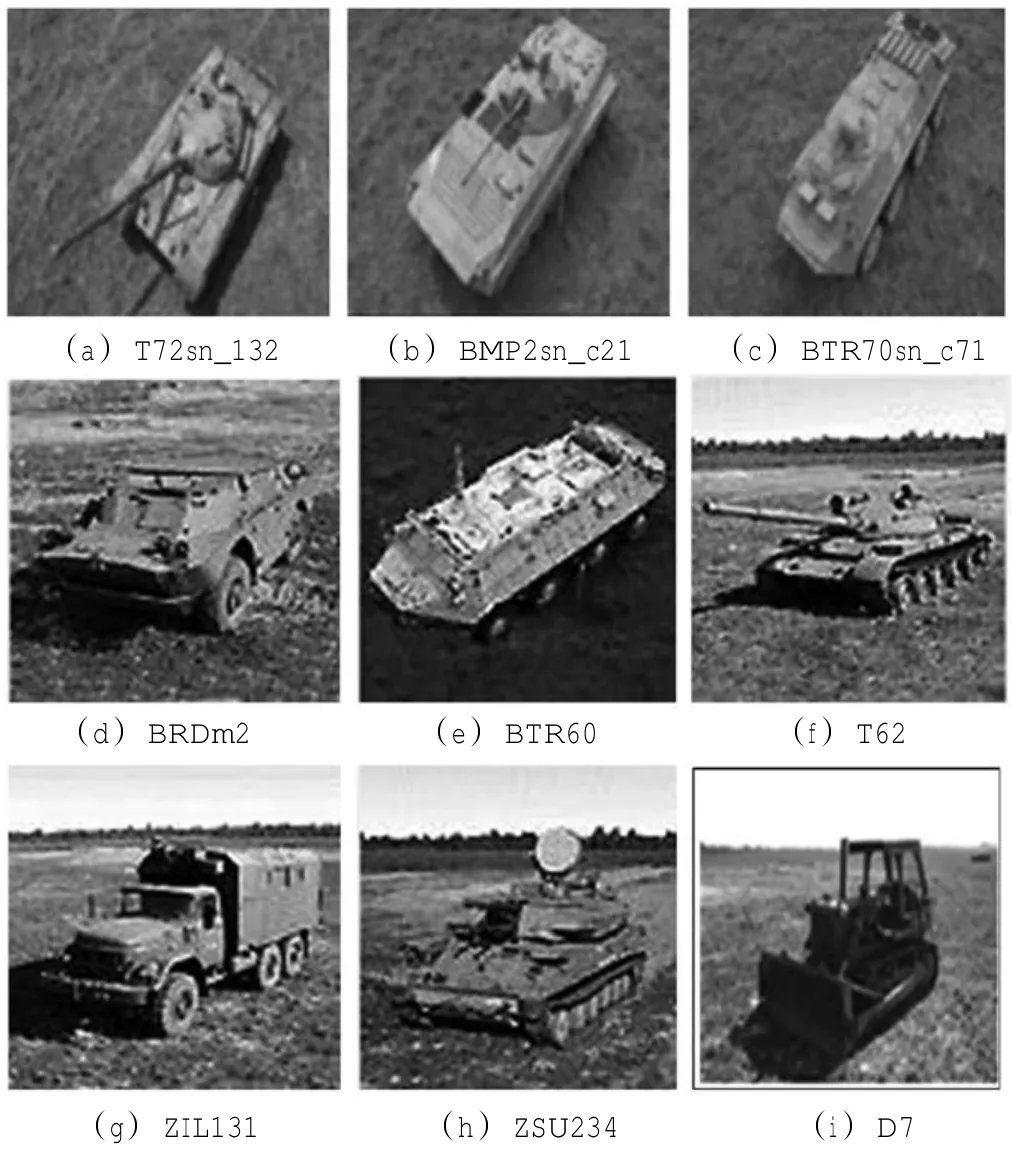
图2 9类军用目标的光学图像Fig.2 Optical im age of nine kinds ofm ilitary targets
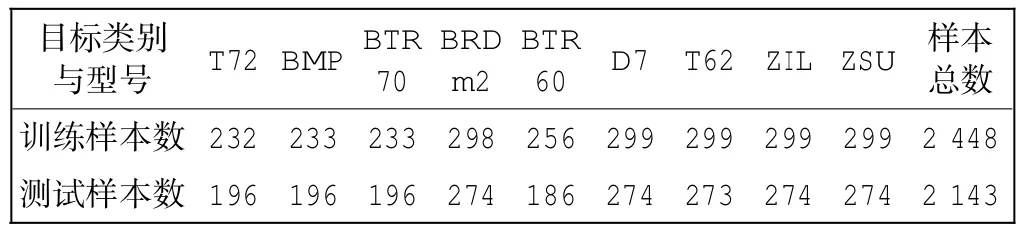
表1 实验所用训练样本与测试样本Tab.1 Training and testing sam ples of experim ent

表2 3类目标识别结果Tab.2 Recognition rate of three different sam ples
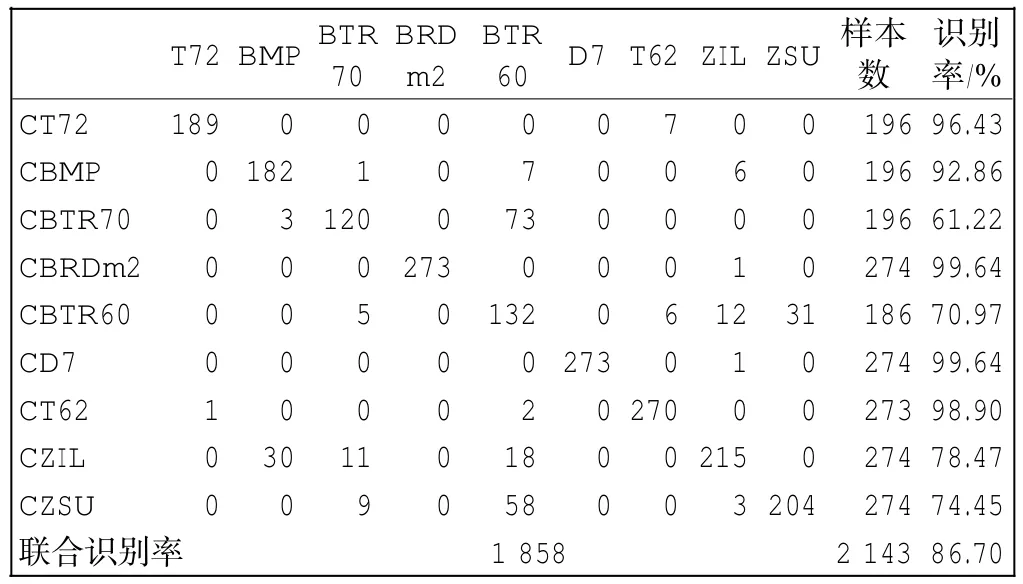
表3 9类目标识别结果Tab.3 Recognition rate of nine different sam ples

图3 9类军用目标分别在方位角30°下的HRRPFig.3 Nine kinds ofm ilitary targets of HRRP at 30°azim uth
由表4第2列和第3列可看出,当使用相同分类器时,文献[11]单特征识别效果不如组合特征的识别效果。这也验证了多特征识别结果比单特征识别效果好。

表4 本文算法与文献[11]识别结果比较Tab.4 Recognition rate com parison between current algorithm and that in Eeference[11]
从表4第3~5列可以看出:①当选用组合特征时,本文算法选用SVM分类器比文献[11]中的最近邻模糊分类器识别结果好。各类目标的识别率都得到了提高,总的联合识别率由原来的96.43%提高到98.64%,相对提高了2.21%。②同样选用组合特征,最近邻模糊分类器在方位信息已知的情况下的识别率要比方位信息未知的情况下识别率要高,而且也相对提高了4.76%。这是因为在一定方位角域内,HRRP之间具有很大的相似性,那么相对应提取的特征同时也更相似,则相对应维数上的特征隶属度就越大,识别效果越好。因此说明了最近邻模糊分类器对方位信息比较依赖。而对于SVM在方位未知的情况下目标识别率仍能很好地识别目标。这也说明了本文算法采用SVM分类器比文献[11]中的最近邻模糊分类器更有优势。表5给出了全部目标进行实验时各算法识别结果比较。

表5 9类目标数据实验结果比较Tab.5 Recognition rate com parison of nine targets
从表5中看出,除了ZIL131和ZSU234这两类目标相对于采用方位信息的最近邻模糊分类器识别率有稍微的降低外,其他目标都有显著的提高,最多提高了17.21%,而且联合识别率由原来81.80%提高到了86.70%。
4 结语
本文给出基于组合特征和SVM分类器的HRRP识别方法。将提取的频域非相干平均距离像和中心矩特征相结合,利用SVM分类器进行目标识别。实验结果表明,相对于单特征来说,多特征更有利于目标识别,而且利用SVM分类器相对于最近邻模糊分类器更有优势,在方位未知的情况下显著提高了识别结果。
参考文献:
[1] DU L,W ANG P,LIU W,et al.Bayesian spatiotemporalmultitask learning for radar HRRP target recognition[J].IEEE Trans on Signal Processing,2011,59(7):3182-3196.
[2]张新征,刘书君,黄培康.基于时频矩阵非负分解特征的多视角SAR目标识别[J].宇航学报,2012,33(9):1269-1278.
[3]高倩,刘家学,吴仁彪.基于平均模板的HRRP自动目标识别[J].现代雷达,2003,25(3):14-17.
[4]梁海涛,张学礼,童创明,等.基于小波分解与方位角平均HRRP 的SVM目标识别方法[J].数据采集与处理,2010,25(1):29-32.
[5]袁莉,刘宏伟,保峥.基于中心矩特征的雷达HRRP自动目标识别[J].电子学报,2004,32(12):2078-2081.
[6]温福喜,刘宏伟.基于中心矩特征的空间目标识别方法[J].雷达科学与技术,2007,1(5):8-12.
[7]童涛,杨桄,李昕,等.基于D-S证据理论的多特征融合SAR图像目标识别方法[J].国土资源遥感,2013,25(2):37-41.
[8]曹伟,周智敏,周辉,等.基于多维特征及BP网络的高分辨雷达目标识别[J].计算机工程与应用,2013,46(8):213-216.
[9]刘先康,高梅国,傅雄军.适用于组合特征识别的最近邻模糊分类器[J].电光与控制,2007,14(5):127-135.
[10] ZHAO Q,PRINCIPE JC. Support vectormachines for SAR automatic target recognition[J].IEEE Transon Aerospaceand Electronic Systems,2001,37(2):643-654.
[11]刘先康,梁菁.基于HRRP中心矩特征的舰船目标识别[C]//全国第三届信号和智能信息处理与应用学术交流会专刊,2009,11:195-198.
[12] KIM K T,SEO D K,KIM H T.Efficient radar target recognition using the MUSIC algorithm and invariant feature[J].IEEE Trans on AP,2002,50(3):325-337.
[13] FUKUNANG K. Introduction to Statistical Patter Recognition[M]. Boston:Academic Press,1990.
[14] RHATNAGAR V,SHAW A K,W ILLIAM R W .Improved Automatic TargetRecognition Using Singular ValueDecomposition[C]//Proceedings of IEEE International Conference on Acoustics,Speech and Signal Processing,1998,5:2717-2720.
(责任编辑:杨媛媛)
Research on HRRP target recognition based on feature com bination and SVM
HAN Ping,SUN Yaping
(Intelligent Signal and Image Processing Key Lab of Tianjin,CAUC,Tianjin 300300,China)
Abstract:HRRP(high range resolution profile)target recognitionmethod based on feature combination and SVM classifier ispresented.Firstly,the incoherentaverage HRRP feature in frequency domain and centralmoments feature are extracted respectively.Then,they are serially combined into new features.Finally,SVM is used to perform classification.Experimental resultswith MSTAR(moving and stationary targetacquisition and recognition)SAR HRRP data sets show that the proposed algorithm can improve correct recognition rate without targetazimuth,and isan effectivemethod for HRRP target recognition.
Key words:HRRP;feature combination;SVM;target recognition
作者简介:韩萍(1966—),女,天津人,教授,博士,研究方向为图像处理与模式识别、SAR目标检测与识别等.
基金项目:国家自然科学基金项目(61231017);中央高校基本科研业务费专项(3122014C004);中国民航大学科研基金项目(2012KYE03)
收稿日期:2015-03-04;修回日期:2015-04-07
中图分类号:TP753
文献标志码:A
文章编号:1674-5590(2016)01-0005-05
