大型重载散货船靠泊厦门港海沧港区7#泊位的操纵方法
2016-04-08李明
李明
(厦门港引航站福建厦门361026)
大型重载散货船靠泊厦门港海沧港区7#泊位的操纵方法
李明
(厦门港引航站福建厦门361026)
本文以大型重载散货船靠泊厦门港海沧港区7#泊位为例,结合引航实践经验,阐述了如何通过拖轮、车、舵之间的相互配合更好地发挥船舶的操纵性能,并提供一种更加合理有效的靠泊操纵方法。
大型重载散货船;厦门港;制速拖轮;操纵方法
近年来,厦门港航道及泊位基础设施不断完善,靠泊海沧港区7#泊位的大型散货船舶不断增多,对引航技术提出了更高的要求。为了高效、安全地完成引航任务,引航员要在引航实践中不断总结经验,熟悉大型船舶的操纵性能,了解港口的航道条件,学习潮汐潮流等相关知识。本文在介绍大型散货船操纵性能和厦门港码头条件的基础上,结合引航工作实践,提出了大型重载散货船舶在靠泊厦门港海沧港区7#泊位过程中,通过制速拖轮,船舶车、舵之间的巧妙配合来实现更为安全有效的靠泊方法,以供参考。
一、厦门港海沧港区概况
1.航道条件
厦门港主航道全长约34.8公里,进出厦门港的20万吨级超大型散货船一般都是重载进港靠泊海沧7#泊位,吃水限制在16.9米。海沧7#泊位岸线总长349米,前沿水深-17.5米,可靠泊15万吨级和限定条件下的20万吨级散货船,15万吨级散货船乘潮水位为4.27米,乘潮年保证率90%,乘潮历时3小时。
2.水文及气象条件
厦门港属亚热带海洋性气候,年均气温20.8℃,相对湿度为78%,年均有雾天数22天,通常风向为每年9月至转年3月的东北向,次长风向为每年4~8月的东南向,每年6~10月为台风季节,因此每年7~9月对港口生产影响较大。海沧港区海域通常海浪方向为东—东南偏东—东南向,强浪向为东南—东南偏南—南向。
厦门湾为强潮海湾,潮型属于正规半日潮型,平均潮差3.98米。落潮历时大于涨潮历时,潮流的往复流规律性较强,属于较典型的往复流。高、低潮均为半日潮流,涨、落潮期间高、低潮的平均流速分别为每秒0.54米、0.35米,垂线平均潮段最大流速分别为每秒1.27米、0.98米。根据实测分层流速资料显示,流向与航道走向交角较大,个别时段表层流速较大。
二、大型重载散货船的操纵性能及拖轮配备情况
大型重载散货船舶的排水量和惯性较大,每单位排水量分配的主机功率比一般货船小,停车和倒车制动性能较差,冲程距离和时间长,因此在船舶制动过程中应适当提早用车;由于大型重载散货船舶的吃水深度大,在港内的可航水域较为有限,虽然其旋回性能较好,但航行稳定性较差、舵面积偏小、舵效迟钝,导致淌航中丧失舵效的时间早、舵对船舶航向的控制能力较差,因此在操纵时应提早用舵,特别在低速操纵时需以大舵角尽早回舵;大型散货船舶满载时受水流影响较大,变速性能变差,因此顺流时需提早控速,以防发生碰撞事故,顶流时加速很慢,尤其以大舵角或者大角度转向时降速非常明显,因此要注意控制好用舵角度和车速。
大型重载散货船舶由于具有较大的排水量,靠泊时所需拖船的总功率也相应较大。以实际情况为例:2015年2月2日11∶30时,18万吨级重载散货船MV STAR LAUREL(桂冠轮)抵达厦门港引航站准备靠泊海沧7#泊位。该轮船长289.94米,船宽46米,前后平均吃水深度-16.4米,设计载重质量159427吨,船舶主机最大功率23740马力,倒车功率是进车功率的75%,港内载重最高船速达到10.9节,最小船速4.7节。实际操作中,该轮配备了3艘5200马力全回转港作拖船助泊,分别带在左舷船头、船尾及正船尾。
三、靠泊操纵方法及注意事项
1.入泊时机的选择
大型重载散货船进出港时,由于靠泊和入泊时受流的影响作用较大,且港池旋回水域受限,很难控制船舶。同时,由于受九龙江的影响,厦门港7#泊位的高潮和低潮到达时间都比潮汐表的时间推迟了45分钟左右,故船舶右舷入泊的最佳时机应选择在涨高平潮30~60分钟后,且最迟不要超过高潮后90分钟,否则会因水流过急增加船舶靠泊风险。结合本文实例,MV STAR LAUREL(桂冠轮)在12∶30抵达港池右舷入泊时几乎没有退潮流,所以此时入泊最为安全。一般情况下,船舶到泊位直至贴上码头需要30~45分钟左右,因为在靠泊的过程中潮水已经微退,反而对安全靠泊有利,可以让船舶左舷受流,更容易使船舶横移向码头。
2.余速、船位控制
对于大型重载散货船舶,成功靠泊的关键是控制好余速、船位。余速的控制手段包括:降低主机转速、停车淌航、倒车、拖轮制动等;船位的控制是根据当时环境提前摆好船位。本文实例中船舶的余速、船位情况如下:引航员11∶20在青屿附近上船,距离泊位9海里左右,当时船速7节左右,因为要控制在12∶30或之后抵达泊位,开始加车并以半速进港,船位保持在航道中间偏右正常航行;当船舶抵23#灯浮时,距离泊位前约5海里时,船舶速度约9.0节,开始减车控速;当船舶抵28#灯浮时,转入海沧航道,距离泊位前约3.5海里时,余速在7节左右,船位沿着航道中间航行,航向286°;当船舶抵嵩屿电厂时,距离泊位前约1.5海里时,拖船已带妥,余速4.5节左右并停车淌航;航向调整到船头对着609#灯浮的右侧方,航向大约290°,驾驶台右侧到海沧1#码头横距为350米左右。
3.制速拖轮的运用
在靠泊操纵中,控制好船舶位置、船舶角度、横移和速度是保证船舶和码头安全的关键。当本船抵达海沧3#泊位时,船首对着海沧12#泊位,航向大约290°,驾驶台右侧到码头横距大约250米、距离泊位前约0.7海里时,余速3.5节左右,开始微速倒车,制速拖船垂直于船尾缆绳开始受力时,提前进行控速。在船舶受到外力的情况下,船头很容易偏转,这时要高度集中注意力争取预判,准备用左舷前后拖船来防止船舶的偏转,或者用制速拖船通过左右摆动形成的角度抑制偏转。按以往经验,此类大型重载散货船靠泊海沧7#泊位时,船头稳住后用第一倒车和制动拖船制动时,船头经常向左偏(原因可能是在退水时,制速拖轮在拉的过程中很难将缆绳和正船尾保持垂直,因此缆绳和船舶首尾线有个夹角,形成外力导致船头左偏;或者是由于船舶的向流性导致船头向水流的方向偏转),但是在倒车之前又不能让船舶向右偏(如果倒车侧向力大,就会加速右偏,拖轮很难控制),所以在操纵过程中引航员需要花费很长时间才能用拖轮制止船舶偏转,往往都是通过左舷前后拖船全力一拉一顶、正船尾制动拖船通过摆动船尾协助,甚至还要车舵的配合才能让船舶稳定住,所以抵达泊位的速度一定不能过快,否则加上倒车的侧向力,控制船舶的偏转非常困难,对船舶靠泊码头带来安全风险。在抵达泊位之前控制余速时,往往用制动拖轮大力拉,让缆绳的方向尽量垂直正船尾,否则一旦形成角度,缆绳产生的侧分力将导致船舶偏转。
当船舶驾驶台抵海沧4#泊位,距离泊位旗前约700米时,驾驶台正面距离码头大约170米左右,船头对着海沧9#泊位中间附近,余速控到1.5节左右。此时停止倒车,制动拖轮继续保持全速拉,当船舶余速达到1节左右时,船舶离泊位旗还有将近250米左右,驾驶台右方距离码头100米左右,为了缩短纵横距离,开始用微速进车。随着纵横距离的接近,当接近码头正横距离40米左右(泊位后面没有船的情况下)、距离泊位旗50米左右时停车,再解掉制动拖轮,使其转到船舶左舷中间偏前协助靠泊,如图1所示。

图1
实践证明,拖轮、车、舵的巧妙配合和综合运用,可以使船舶的靠泊操纵更加合理有效。当然,这样做的前提是制动拖轮要具有高强度的缆绳和较大的功率、引航员要具备精湛的引航技术和丰富的实践经验。需要注意的是,在靠泊的过程中,潮水会逐渐消退,由于船舶受水流的影响较大,如果抵达泊位的时间有所延迟,也会造成其他安全隐患,因此控制船位时要掌握好操作时间,避免水流对大船的不良影响;此外,靠泊泊位正船尾处最好没有其他船影响制动拖船作业,否则需要在驾驶台距离码头70米左右时提前解掉尾部拖轮。
还有一种通常的做法是,当船舶驾驶台抵达海沧4#泊位、距离泊位旗前约700米时,驾驶台正面距离码头大约170米左右,船头对着海沧9#泊位中间附近,余速控到2节左右停车,此时解掉正船尾制动拖轮,使其转到左舷船头中间偏前位置,用拖轮控制入泊和靠拢角度,让大船继续淌航,当接近泊位旗时把船倒停,让拖船继续顶推,使大船缓慢接近泊位,如图2所示。
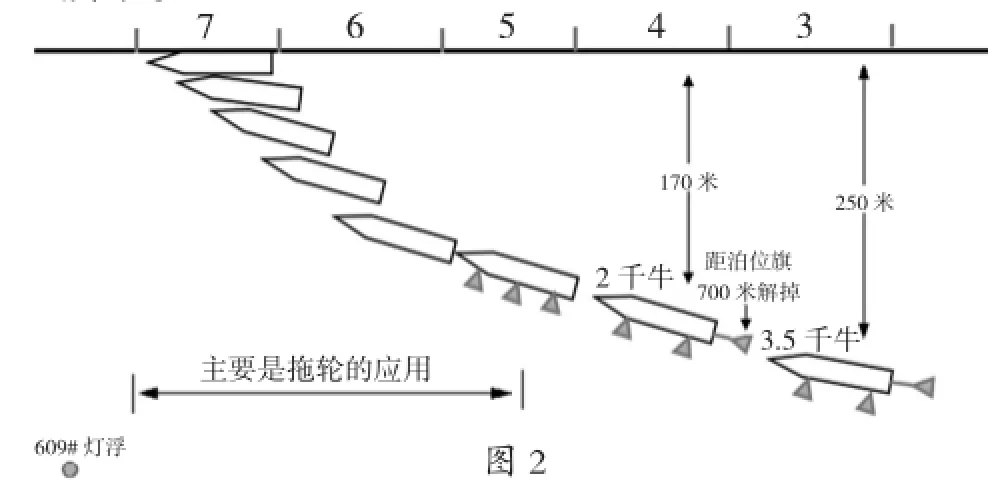
图2
如图2所示,此种方法完全依靠3艘拖轮去控制船位、入泊角度、横移速度等,由于拖轮顶推大型重载散货船舶的时间较长,对入泊角度的控制比较困难。此种方法虽然经常采用,但船头在靠泊过程中容易形成摆头,需要不断调整前后拖船的顶推力进行控制。同时,如果没有对大船的前进速度做好预判,则需要不断用车来调整靠泊位置。因此与第一种方法相比,这种方法的操作难度较大,对引航员的技术要求更高,控制船位的效果较差。
4.海沧7#泊位入泊时的注意事项
根据以往经验,大船的入泊角度以0°为宜,入泊速度不能大于每秒5厘米,若贴靠码头的速度过快,极易发生大船碰撞码头事故。一般情况下,船舶入泊前10~20米时就要将入泊角度拉平,使大船与泊位保持平行角度入泊。但海沧7#泊位比较特殊,码头前沿及周围富余水深较浅,当船舶距离码头大约50米左右时就能感觉到岸推效应,因此在距离码头20米左右处以平行角度靠入码头很难做到,必须使船头保持较小角度先入泊,然后用拖船大力顶推船舶,才能缓慢靠近码头,在船头即将或刚好贴上码头时,再调整船舶使其与码头平行。同时要尽量避免在有流的情况下靠泊码头,否则容易发生船舶靠不上码头或船头碰撞码头的危险情况。
责任编辑:张明