空间机械臂机电一体化关节的设计及控制
2016-04-07吕晓军
吕晓军
(西安航空学院,西安 710077)
空间机械臂机电一体化关节的设计及控制
吕晓军
(西安航空学院,西安 710077)
由于现在强调一体化设计,因此空间机械臂也在逐渐实现及机电一体化。机电一体化的空间机械臂提高了其可靠性、集成性和自然性,为我国航天事业的发展提供了强大的推进力。空间机械臂是一个集机、电、热、控一体化的空间机电系统,其研究和设计难度较大,需引起高度重视。
空间机械臂 机电一体化 设计 控制
随着科技的不断进步,国民经济的迅速发展,国防工业发展迅速,人们生活水平不断提高,人们越来越关注与太空相关的一些新闻,使得人们对航天器的需求量日益增加,并且对航天器的综合能力要求也不断提高。特别是在空间站轨道服务、宇宙探测等空间技术领域的要求也不断提高,使得对空间机械臂的要求越来越迫切,且对其工作能力和工作性质也提出了新的要求。因此,要坚持独立自主、自力更生的原则,不断加强对空间机械臂机电一体化的关节设计和控制研究。
1 空间机械臂发展概况
随着地球生态的不断恶化,人们开始探索对太空资源的利用,使得世界主要国家都在进行航天事业的发展。航天事业的发展离不开空间站的设立,因此绝大多数国家都在空间站的设立上有着自己的核心技术。空间机械臂可以称为是空间站设立的重要组成部分。空间机械臂有在宇宙飞船舱内和宇宙飞船舱外两大类,主要实现对宇宙飞船的维修、装配合作的空间站等作用。我国从20世纪80年代开始,先后开展了多个空间机械臂的基础研究和演示项目,摸索相关问题和关键技术的解决途径,如今已取得了巨大突破,具体表现就是我国航天事业的飞速发展。虽然我国载人航天事业取得了巨大成就,但是还存在许多问题亟待解决,如实现对空间机械臂机电一体化关节的设计。这就需要我国加大对空间机械臂的研究力度。
2 机电一体化关节的总设计
2.1 机械臂的构成
空间机械臂主要通过计算机对在轨控制系统实行远程操作,以实现空间机械臂能够在无人情况下进行良好的运作。空间机械臂主要包括:地面组控制、在轨控制系统、末端作业、工具系统、基座移动系统、感官系统、末端效应器、关节及其驱动等部分,如图1所示。
2.2 空间机械臂的功能要求
由于宇宙环境不适合人类生存,因此在载人航天技术上,必须要能应对在宇宙中出现的突发情况或是实现在宇宙中的施工,以实现建造某一具体的事物的功能,因此空间机械臂应运而生。人们在地面进行远程控制,可使空间机械臂通过其自动化运转,实现人们在宇宙空间中所要求的某些事情。
2.3 机电一体化设计方案
①以调研为基础,确定机电一体化,关节设计的整体方案。
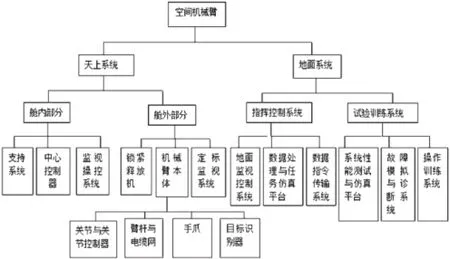
图1 空间机械臂系统构成
②根据实际的功能性要求和性能参数,分配零件的性能指标。
③进行关节内部结构和电气控制硬件设计。
④设计关节控制算法的控制方法,并编写相应的控制软件。
⑤完成关节结构的相应软件生产,对其关键性能和功能进行测试。
⑥机电一体化的关节控制研究。
2.4 关节控制模式
对空间机械臂的控制,主要是通过地面的控制系统对空间机械臂进行远程控制。根据地面所下达的指令,主要实现对空间机械臂的以下三种控制。
2.4 .1 位置控制
地面的人们可以通过中央控制系统,对空间机械臂进行位置调整,使其能在更好的位置进行工作。
2.4 .2 速度控制
宇宙中,由于重力与地球差异较大,因此对速度的控制尤为重要。由于宇宙处于真空状态,重力较低,因此必须控制速度。
2.4 .3 力量控制
力量控制是空间机械臂的主要工作之一。空间机械臂不同于人的手臂,可以由人来掌握力量的释放大小,而空间需要通过中央控制系统对空间机械臂进行远程操作,因此对力量的把握必须准确。
3 发展空间机械臂的意义
3.1 工程应用
空间机械臂能够实现在复杂环境下的施工,这不仅能够促进载人航天事业的发展,而且能够促进我国国内工程建设的发展,如对一些危险的建筑使用空间机械臂进行组装,不仅使工程更加便利,而且也减小了工程的危险性。
3.2 技术牵引
空间机械臂的发展带动了我国相关基础工业园高科技的发展,如空间机械臂为了适应复杂恶劣的空间环境,对其材质要求较高,而这促进了国内合金材料工业的发展。
3.3 增强我国综合国力
现如今,载人航天事业的发展能够影响国家在国际上的自主话语权,而我国空间机械臂的发展,促使我国载人航天事业不断进步,提高了我国在国际上的话语权,进一步增强了我国的政治地位。
4 总结
随着我国经济的不断发展和科学技术的进步,国民生活水平日益提升,越来越多的人开始关注国家太空事业的发展。航天科技水平是衡量一个国家综合国力的标准,要使我国在国际上拥有自主话语权,就必须发展航天事业,也就必须重视对空间机械臂的研究。空间机械臂机电一体化关节设计,使其能够更好地为我国载人航天技术服务。
[1]谭春林,刘新建.大型挠性空间机械臂动力学与减速比对振动抑制影响[J].国防科技大学学报,2009,(4):102-106.
[2]潘博,孙京,于登云.大型空间机械臂容错关节与控制[J].机械传动,2010,(9):1-5.
[3]王宗源,陈力.柔性空间机械臂系统的模糊滑神经网络控制及柔性振动主动抑制[J].空间科学学报,2013,(5):569-576.
[4]梁捷,陈力.柔性空间机械臂末端运动及柔性振动的模糊自适应补偿控制[J].兵工学报,2011,(1):45-57.
[5]孙敬延,史士财,郭创强,刘宏.空间机械臂在轨快换高精度模块化关节的研制[J].四川大学学报,2012,(1):209-214.
Design and Control of Mechatronics Joints for Space Manipulator
LV Xiaojun
(Xi’an Institute of Aeronautics and Astronautics, Xi’an 710077)
As a result of the emphasis on integrated design, space manipulator is also gradually realized and mechanical and electrical integration. Mechatronic space manipulator to improve its reliability, integration and naturalness, for the development of China’s space industry has provided a powerful impetus. Space manipulator is a mechanical, electrical, thermal, control integration of space mechanical and electrical systems, its research and design more difficult, need to pay great attention.
space manipulator, mechatronics, design, control
