基于组网的智能变电站采样对时问题探讨
2016-04-07朱继红须雷董隽刘东超刘鹏
朱继红,须雷,董隽,刘东超,刘鹏
(南京南瑞继保电气有限公司,南京211106)
基于组网的智能变电站采样对时问题探讨
朱继红,须雷,董隽,刘东超,刘鹏
(南京南瑞继保电气有限公司,南京211106)
在智能变电站中,网络采样模式下的对时系统对时策略以及过程层设备合并单元的数据同步机制起着重要作用。对时系统异常情况下对合并单元的影响,以及合并单元对异常对时系统的处理机制都决定了数据同步的准确性。针对采样同步对时系统和合并单元的对时策略进行探讨,分析多种可能发生的异常对时情况及由此导致伪同步现象,给出了对时系统应对策略和合并单元的同步机制。
合并单元;GPS;北斗;同步
0 引言
目前国内已广泛开展智能变电站的建设工作,MU(合并单元)作为智能变电站过程层的关键设备,其作用非常重要。关于电子式互感器到合并单元的数据同步,以及合并单元之间级联的各种数据同步已有较多的研究,但多数都是基于正常情况下的同步研究,就异常情况下的同步则没有给出更多的分析方法和研究结果。
从智能变电站过程层建设的方案来看:国家电网公司倾向于基于点对点的IEC 61850-9-2的方案;南方电网公司倾向于110 kV及以下采用组网IEC 61850-9-2的方案,220 kV及以上采用点对点方案;国外更加倾向于组网的方式。另外,在点对点方案下,如测控装置、故障录波器、网络分析仪等也都使用了组网的数据。从长远来看,组网在数据共享、解决过程层设备发热等问题上具有很大优势,因此合并单元的同步问题是一个值得认真对待和探讨的问题。
1 卫星对时系统
1.1 对时系统简介
对时系统在智能变电站中相比常规变电站扮演了更为重要的角色。常规变电站都是直接将电流、电压电缆拉到不同的保护控制设备中,保护控制设备通过自己的同步采样完成模拟量的同步,对时系统往往只用于装置时间对时,以及SOE等事件的对时,和采样本身无关。智能变电站中的对时系统,除了承担常规变电站中的作用外,更重要的是还要给采样时刻对时,实际上有时间同步和采样同步2个功能。
1.2 对时系统方案
以下基于组网来分析对时系统的行为。IEC 61850-9-2规定,当SmpSynch(同步位)为真时,GPS秒对时信号来临的时刻所采样数据的SmpC-nt(样本计数器)为零[1]。各个间隔之间通过样本计数器来进行数据同步,避免了数据的再同步。
站内较为完备的对时系统方案如图1所示[2]。从安全性考虑,往往配置2套主时钟源,一套为北斗时钟源,另一套为GPS时钟源。2套主时钟源互为备份,相互对时,从时钟通过一定的策略选择时钟源后输出信号。

图1 智能变电站站内对时系统
1.2.1 主时钟源抖动的异常处理
分析主时钟源可能产生抖动的情况。假设主时钟源重启上电,之后主时钟源有可能在短时间之内就能和卫星信号同步,也有可能较长时间还未同步上。如果主时钟源较长时间不输出同步信号给从时钟,会导致过程层设备因长时间采样数据不同步而闭锁相关保护。
对此,给出一种合理的主时钟源上电后执行顺序,如图2所示。除非遇到天气不好、天线安装不妥等问题,一般情况下,对时系统5 min内就能与卫星同步。目前,相关标准要求MU具备10 min的守时能力,因此5 min内不输出同步脉冲还是可以承受的,且2套主时钟源同时掉电的概率较小。
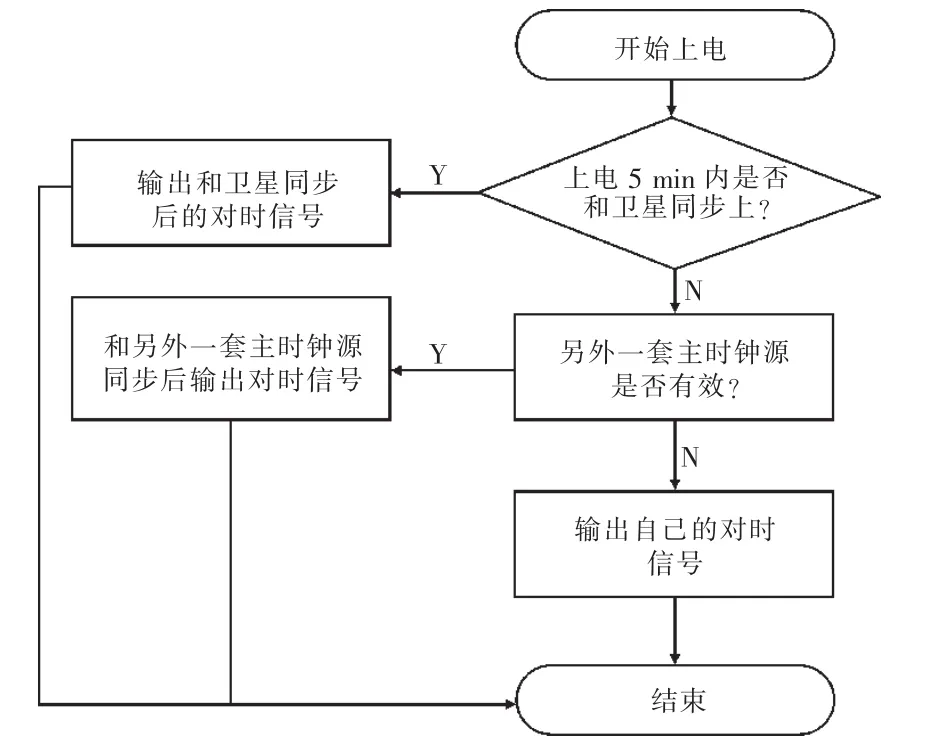
图2 主时钟上电输出顺序
1.2.2 主时钟源同步方式
主时钟在规定时间内没有跟踪到任何有效的卫星信号后,按照自己的时间体系输出对时信号,当最终卫星信号跟踪有效后,存在一个问题:当前输出的对时信号P1和卫星对时信号P2之间必然会存在时间差。对此,如图3所示,可通过2种方式来消除时间差:一是快拉方式,即P1直接同步到P2上,这种方式优点是能够立即同步,缺点是对时秒间隔信号会剧烈抖动;二是慢拉方式,即P1每秒调整微妙级的时间,缓慢同步到P2上,这种方式优点是避免秒间隔剧烈抖动,但可能造成同步时间很长。
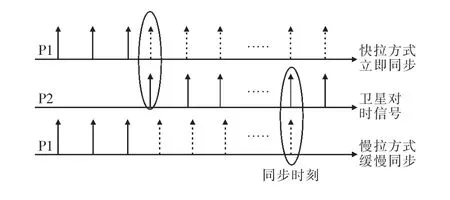
图3 快拉慢拉同步方式
假设最恶劣的情况下,P1和P2之间差500 ms,如果采用慢拉方式每秒调整步长为3 μs,则2个信号需要500 000/3=46.296 h才能够同步上,耗时很长,基于组网的同步方式无法接受。对此,提出一种可以兼顾同步快速性和时钟稳定性的方法:主时钟源上电5 min后如果没能和有效卫星对时信号成功同步,则首次同步有效卫星信号时采用快拉方式进行,一旦同步上以后无论何种情况下P1和P2之间再产生任何时间差均按照慢拉方式进行同步,即主时钟源最多只能进行一次快拉,触发再次上电。
智能变电站中主时钟源与卫星同步一段时间后,自身就具备较好的守时能力。目前行业标准的要求是55 μs/h[3],但无法满足智能变电站的需求,相关标准正在修订,守时指标将会提高至1 μs/h,一般以12 h为测量时间。由此可知,一旦同步后,主时钟失去有效卫星后对时源即进入守时状态,当有效卫星对时源再次来临时,守时保证两者时间差不会太大,由慢拉方式就能够迅速同步。
1.2.3 时钟源的输出
从图1中可以看出,从时钟直接给MU进行对时,所以其对时行为直接影响保护的性能。从时钟同时接收A,B 2套主时钟源的对时,一般来说A,B有不同的优先级,假设A>B,则仅当A套无效B套有效时选择B套,否则优先选择A套。从时钟对时原理类似于主时钟源,不同的是主时钟源通过卫星进行同步,而从时钟源由主时钟源进行同步。由于从时钟直接对MU进行授时,所以当从时钟上电重启后应立即输出对时信号,否则会发生保护失效的情况。为了加快同步进程,允许从时钟在上电后和真正有效的主时钟在同步过程中进行一次快拉,之后只能通过慢拉方式进行调整。
从以上分析可知,无论是主时钟源还是从时钟源,在上电过程中仅首次同步允许快拉方式,而其它任何情况下都采用慢拉方式是较为合理的。目的是防止时钟抖动过大,同步时间过长,导致数据同步异常闭锁相关保护控制设备。
2 MU采样同步
MU作为数字化采样环节的核心设备,能否正确同步数据对保护控制设备至关重要。点对点方式下,发送延迟固定基于插值同步的方式不依赖于时钟同步,时钟对采样同步几乎无影响;组网方式下,时钟决定了MU的同步精度,如果出现伪同步的情况(SmpSynch为真,而实际上数据却未同步),后果将不堪设想。
当对时系统正常时,MU的同步比较简单,只需将采样点秒同步时刻对齐即可。但异常情况下的处理往往比较复杂,如果处理策略不恰当,则会导致极端情况发生。
2.1 守时指标
守时的概念为:如果接收单元失去外部时间基准信号,则时钟进入时间保持状态,这时保持时钟和标准时钟仍能保证一定的时间准确度。可见守时主要是针对外部时间基准消失的情况来进行定义的。
MU在国家电网企业标准中提到对守时性能的要求是10 min内守时误差小于4 μs[4];在南方电网目前有1 h内守时误差小于10 μs和2 h内守时误差小于20 μs 2种提法。试验室条件下的MU满足相应的守时指标后,现场MU却未必能够保证这个指标。现场的守时指标是一个系统指标,除了决定于MU的晶振、守时算法外,还决定于对时源的精度。由于守时是需要基于时钟驯服的,如果驯服有问题则再好的晶振和守时算法都是徒劳,可见对时系统在组网智能站中的关键地位。另外,守时指标是一个绝对值的概念,对2台1 h内守时误差小于10 μs的MU而言,可能1台MU往标准时钟的一个方向偏,而另外一台MU可能往反方向偏,最终1 h后2台MU的指标却相差了20 μs。
MU的晶振在守时过程中是非常关键的环节。由于晶振受温度影响比较大,普通晶振无办法满足守时的要求,一般会选取温补晶振或恒温晶振来弥补温度对晶振频率的影响。经过对比试验后,发现采用0.2 ppm的恒温晶振可满足守时要求,试验结果如表1所示。恒温晶振并不是解决了温度对晶体的影响,而是通过恒温槽给晶体提供了一个稳定的温度环境。

表1 0.2 ppm恒温晶振守时测试
2.2 MU守时
2.2.1 时钟源异常引起的伪同步
目前各厂家MU产品的守时策略并不统一。有的厂家不仅在外部对时信号消失的情况下才进入守时,当对时源切换出现问题时(如A套主时钟源切到B套主时钟源,而2套时钟源输出有较大差距),产生了较大的抖动(如图4所示),合并单元也进入了守时状态。当守时结束后,合并单元先置失步后再和对时信号进行同步。正常情况下,如果站内所有的合并单元都采用该策略,可确保MU同步。但若发生异常情况,如在MU1守时过程中MU2因异常发生重启,重启后的MU2必然会直接跟上时钟源,此时MU1和MU2的SmpSynch同时为真,但数据却相差了t3时刻,出现了伪同步情况,当t3较大时,基于差动原理的保护就会误动。
可见,如果对时源和MU认可的秒脉冲出现长时间的偏离情况(简称状态1),此时采取简单的守时并不可取。为了提高MU的时钟防误能力,当状态1出现时,MU可以先进入守时状态,这样就具有了一定的容错能力;当守时时间超过Δt1时(比如3个秒脉冲),偏差还没有恢复,则MU直接置采样失步,然后确认时钟源的有效性,最后再和时钟源进行同步。
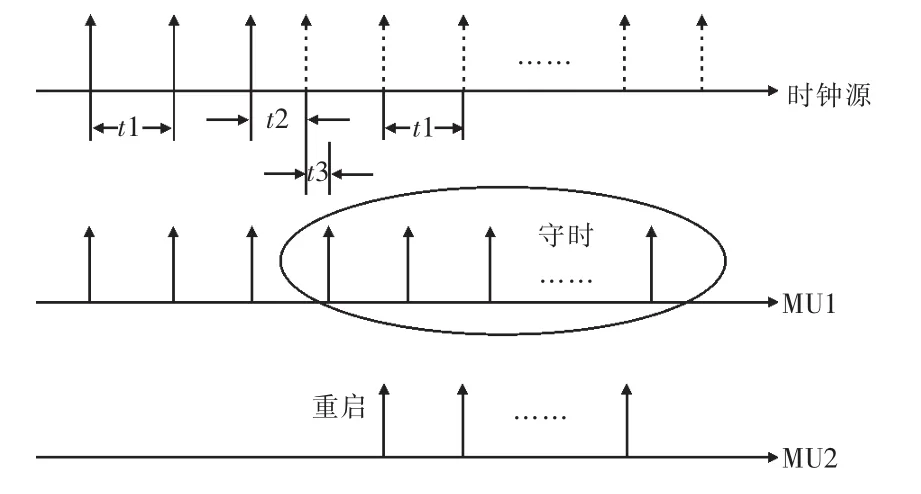
图4 时钟切换抖动中的伪同步
为防止图4中的伪同步情况发生,需设制一个门槛,即当MU重启后,需要对对时信号确认Δt2(比如5个秒脉冲)后才认为其有效,且必须保证Δt2>Δt1(如图5所示)。Δt2>Δt1的条件确保了同一厂家的MU不会出问题。由于不同厂家的MU对Δt1和Δt2的取值不一样,就会出现即使厂家各自满足Δt2>Δt1的条件,在配合时也会出现误同步的现象。所以需要各厂家采样同步的对时策略达成共识,并遵循相同的相关标准。

图5 消除时钟抖动切换带来的伪同步
另一种异常情况是:假设MU1,MU2已与时间同步系统同步,此时若MU1的对时回路意外断开导致对时信号长时间消失,MU1将进入守时模式。与此同时,同步时钟源发生了异常的切换状态,MU2经过短时间守时后和时钟源同步上,这时又出现了伪同步现象(如图6所示)。但对于这种对时回路断链且同时发生时钟源异常切换情况下的伪同步,目前还没有比较好的解决方案。
2.2.2 对时系统机制
对时系统存在慢拉和快拉方式,运行过程中主要还是以慢拉方式为主,为了减少抖动,有的厂家会以每秒调整固定的几微秒(比如3 μs)的方法慢慢向标准对时源靠拢。如果所有的MU都运行正常且对时回路也正常,那么所有MU应该也会逐步地跟踪慢调的时钟。

图6 对时断链引起的伪同步
假设慢调过程中,时钟源发出的对时信号是固定的(ΔP+Δt),此处ΔP是对时源默认的秒间隔,Δt是每秒调整的步长,那么对于MU而言,其收到对时信号是稳定的间隔为(ΔP+Δt)的对时信号。所以(ΔP+Δt)秒间隔数据非常容易地进入了MU守时数据之中,如果MU是以64 s统计数据进行守时的,则慢拉过程持续64 s以上MU每秒守时的数据也就变为了(ΔP+Δt)。这个值极可能和标准秒间隔相差很多。如果此时MU对时回路出现断链,则断链的MU会以(ΔP+Δt)秒间隔数据进行守时,而在此MU守时的过程中对时源完成了慢拉过程,假设秒间隔变为了ΔP1(ΔP1≠ΔP+Δt),则对时回路正常的MU和守时的MU之间随着时间增长同步误差逐步拉大,最终可能会造成保护误动。
2.2.3 解决方法
如前文所述,如果采用固定秒间隔(ΔP+Δt)来进行慢拉,则MU无法分辨此过程为慢拉过程。建议采用抖动慢拉调整方式,避免伪同步情况的发生(如图7所示):即第n秒间隔为(ΔP+ Δt1),第n+1秒间隔为(ΔP+Δt2),第n+2秒间隔为(ΔP+Δt1),则MU可以计算出前后2个秒间隔的差值ΔT=abs(Δt2-Δt1),当此ΔT大于某门槛值ΔH时,则当前秒间隔不计入守时统计数据。根据智能电网对对时系统的时间精度要求为1 μs以内,假设慢拉过程期望的调整速度平均为3 μs/s,设Δt1=2 μs,Δt2=4 μs,ΔH=1 μs,则ΔT>ΔH,慢拉过程中MU不会将统计数据计入守时数据。
为了保证守时的可靠性,建议加强守时数据统计进入的门槛,比如连续5次前后对时信号的ΔT<ΔH才认为对时间隔的数据是合格的,才能用于守时算法。
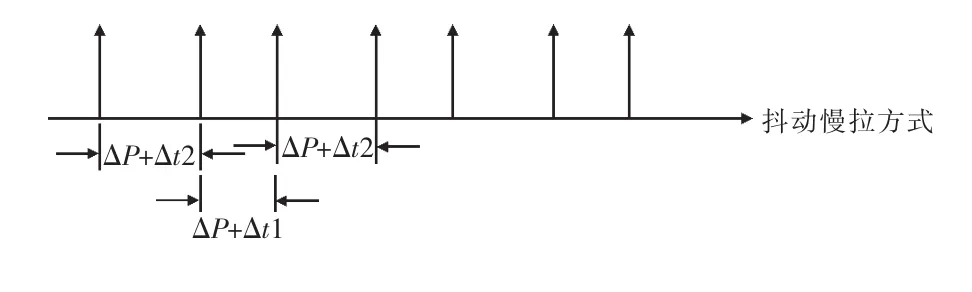
图7 抖动慢拉方式
2.2.4 其他影响守时指标的因素
还有一些情况也有可能导致守时出错。下面列举说明:
(1)目前各厂家均采用了恒温晶振来满足守时指标的需要。但恒温晶振即使在对时时钟源非常稳定的情况下也未必可以满足守时指标。如果装置先前一直处于电源关闭状态,突然上电,则恒温晶振需要一定的时间来恒定温度。如果采用这段时间内的统计数据作为守时依据,则晶振频率并未稳定,守时效果将会受影响,所以进行守时算法设计时必须要考虑晶振的这些特性。
(2)假设1台MU经过1 h的守时试验,和标准对时信号相差4 μs,那么其3 h的守时指标也不能推算为12 μs。这是因为晶振的老化指标会对守时产生很大的影响,极大多数情况下MU的3 h守时误差比12 μs差很多。假设某恒温晶振的老化指标为6 ppb/天,晶振频率为20 MHz(50 ns),12 h前其1 s的CLK数为2e7个,受老化影响,12 s后最恶劣情况下1 s和原来误差为:

因此使用12 h前的守时数据来进行守时,则仅因晶振老化带来的误差在2 h内就有可能达到3×2×3 600=21 600 ns=21.6 μs,这还没有考虑2 h守时过程中的晶振老化数据。
可见,当时钟源处在长时间的慢拉过程中,根据先前的分析,慢拉过程中的对时间隔数据不计入守时统计数据,所以合并单元的守时时间应该随慢拉时间增长而减少,设计守时算法应予以注意。
3 结语
分析了目前比较可靠的智能站过程层设备对时方案,即主备时钟源加上从时钟的方式,给出了对时系统上电时的一些处理策略,并针对主备时钟非正常切换时的异常行为提出慢拉快拉、抖动慢拉的解决方法。针对异常情况下的合并单元守时性能,提出了可能存在的异常情况,并给出了分析以及应对方法。
对时系统比较复杂,对此总体思路是:对时系统时间源在正常运行过程中应该不出现时钟跳变的情况,对时调整应以慢拉方式进行。守时指标并不是个体指标,而是系统指标,需要考虑合并单元的当前运行状况以及对时源的情况,并在守时算法中体现出来。
当前比较迫切的任务是出台一个对时标准、守时策略,以统一各个厂家在异常情况下的处理机制,才能做到各个厂家MU产品的配合无死区,防止伪同步的发生。即将发布的国家电网公司企业标准《智能变电站合并单元技术规范》,将对采样对时的策略有所规定,能够解决不少问题。
[1]IEC 61850-9-2∶Communication networks and systems Part in substations 9-2∶Specific Communication Service Mapping(SCSM)Sampled values over ISO/IEC 8802-3[S].
[2]Q/CSG 110018-2011南方电网数字及时间同步系统技术规范[S].2011.
[3]DL/T 1100.1-2009电力系统的时间同步规范[S].北京:中国电力出版社,2009.
[4]Q/GDW 383-2009智能变电站技术导则[S].北京:中国电力出版社,2009.
[5]张晓华,熊浩清,杨红旗,等.数字化变电站的一起同步采样事故分析及变时间窗综合纠错对时方案.电力系统保护与控制,2011,39(23)∶17-23.
(本文编辑:方明霞)
Discussion on Intelligent Substation Sampling Synchronization Based on Network Sampling
ZHU Jihong,XU Lei,DONG Jun,LIU Dongchao,LIU Peng
(Nanjing NR Electric Co.,Ltd.,Nanjing 211106,China)
In intelligent substation,the strategy of time synchronization system in network sampling mode and data synchronization mechanism of merging unit of process layer equipment play an important role.The influence of time synchronization system abnormity on merging unit and influence of merging unit on the processing mechanism of abnormal system decide data synchronization accuracy.The paper discusses synchronization strategy of synchronization system and merging unit on the basis of sampling synchronization and analyzes various potential synchronization abnormities and the consequential pseudo-synchronization;moreover,it presents strategy of time synchronization system and synchronization mechanism of merging unit.
merging unit;GPS;BeiDou;synchronization
TM762
:B
:1007-1881(2016)02-0018-05
2015-10-30
朱继红(1978),男,高级工程师,从事数字化变电站过程层方面的研究工作。