用于长周期高精度轨道控制任务的快速半实物仿真系统
2016-04-07张小伟王静吉袁彦红戴维宗黄京梅张泽涛
张小伟,王静吉,袁彦红,戴维宗,黄京梅,张泽涛
(1.上海航天控制技术研究所,上海201109;2.上海市空间智能控制技术重点实验室,上海201109)
用于长周期高精度轨道控制任务的快速半实物仿真系统
张小伟1,2,王静吉1,2,袁彦红1,2,戴维宗1,2,黄京梅1,2,张泽涛1,2
(1.上海航天控制技术研究所,上海201109;2.上海市空间智能控制技术重点实验室,上海201109)
针对长周期高精度轨道控制任务的快速仿真试验需要,对传统的卫星控制系统半实物仿真系统进行了重构.提出利用动力学仿真模型程序的超实时运行驱动试验进程加速的方法,介绍系统总体设计思路及其结构、组成和工作原理,给出实时/超实时双模高精度动力学模型的开发及星地状态同步两项关键技术的具体实现,并通过应用实例证明了系统的有效性.
半实物仿真;超实时;动力学仿真机;轨道控制
0 引言
空间交会、星座组网、编队飞行、深空探测等新型空间任务的轨道控制与传统轨道控制相比,持续时间更长,控制精度要求更高.对于这些具有长周期、高精度特征的轨道控制任务的仿真试验,传统的试验方法存在耗时过久、精度不足的问题,有必要研究开发针对新型轨控任务特点的试验验证系统.
航天器控制系统主要的试验验证方法是仿真,可将其分为数学仿真、半实物仿真和全实物仿真[1-2].数学仿真实现简便灵活,但由于都是数学模型,不具有实物特性,模型实物之间的差异会导致验证不充分、不全面;全实物仿真真实性最高,但实现难度大、且一般用于姿态仿真,对于轨道控制任务不适用;半实物仿真是将重点考核的对象用实物接入,不需要或无法使用实物的对象用数学模型模拟,其模拟真实度、系统复杂度介于前两者之间,综合仿真置信度最高,所以是当前工程领域使用最普遍的仿真试验方式[3].
为压缩仿真时长,可以采用超实时仿真的方式进行试验,超实时仿真是通过调整仿真时间与真实物理时间的比例实现仿真的加速运行.将超实时仿真应用于长周期空间轨控任务国内已有相关研究[4-7],但基本上还停留于数学仿真,仅适用于任务策略层面的验证,距离对整个控制系统尤其是要同时囊括轨道和姿态控制的系统进行验证还有很大差距,国外文献中也未查见将快速超实时仿真用于轨道控制任务仿真的报道.文献[8]尝试将超实时仿真应用于航天器地面姿轨控系统半实物仿真,取得了一定效果,但实现过程较为复杂,且在超实时运行阶段会有精度损失.
综上,将超实时仿真和半实物仿真结合应是解决长周期高精度轨控任务试验验证问题的一个行之有效且工程实现性较强的研究方向.本文对将超实时仿真应用于型号半实物仿真系统进行了研究,基于已有的半实物仿真系统架构,开发完成了一套可应用于长周期高精度轨控任务的快速半实物仿真验证系统,工程应用表明其实现了预期效果.
1 系统设计思路
传统的半实物仿真系统是实时连续运行,而长周期高精度轨道控制的仿真试验要求是不仅能实时运行,还能在需要时通过“超实时运行”来压缩试验时间,同时保证高精度.所以怎样实现半实物仿真系统的实时/超实时双模式运行是研究的关键和难点.
图1中实线部分是典型的半实物仿真系统的结构简图:动力学仿真机、敏感器、控制器、执行器四大功能部分构成一个典型控制系统回路,循环迭代运行.一般情况下,敏感器、控制器、执行器使用的是星上实物产品.动力学仿真机用高性能计算机实现,主要功能是采集、接收、处理执行器的动作信息,将其作为输入项进行动力学、运动学解算,计算生成激励信号,驱动敏感器数据的实时更新.它是驱动整个系统有序运行的核心,也是系统工作时序的基准.
如能实现动力学仿真机的实时/超实时双模运行,并使系统中其他功能部分保持与之同步联动运行,便实现了整个系统的实时/超实时双模运行.敏感器、执行器在系统中均是被动执行,时刻保持与系统的同步,只有控制器具有主动运行特性,需要干预控制才能实现与动力学仿真机的同步.为实现此目的,本文是在动力学仿真机和控制器之间建立一条信息传输和转换通道,并通过一定的同步机制将动力学运行结果对应的卫星状态(主要是轨道运行相关状态)更新至控制器,使其在需要时保持与动力学仿真机的状态同步切换.完成这一动作的功能模块暂称之为“状态同步机”,如图1中虚线框所示.
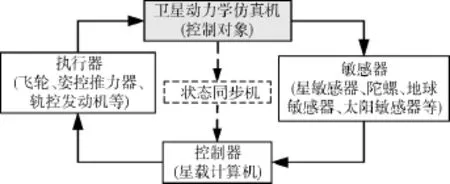
图1 半实物仿真系统结构简图Fig.1 Structure of HIL system
2 系统实现
2.1 系统组成及工作原理
如图2所示,粗实线框是参与仿真运行的主要功能单元,虚线框是与之配套的地面测试设备,设备与实物产品通过电缆连接,计算机之间通过千兆以太网连接.将所有设备用一台计算机远程集中控制.
动力学仿真机是一台配置了若干接口功能板的高性能工业计算机,运行VxWorks实时操作系统.仿真机上位机是一台高性能计算机,动力学仿真模型在上位机中的MATLAB/Simulimk/Stateflow环境下开发[9],开发完成后编译成目标文件并加载至仿真机运行.模型的核心是高精度轨道动力学和姿态动力学模型.模型包含实时和超实时两种运行模式的功能模块,两者能根据需要进行状态设置和切换.仿真模型的另一大功能部分是接口数据处理模块,包括:根据轨道姿态运行状态计算和输出驱动敏感器或其地测设备(目标模拟器)工作的数据;从执行器或其地测设备采集和处理执行器的动作信息并作用到轨道姿态动力学模型;接收远程控制指令,进行仿真初始条件设置,程序开/闭环控制,实时/超实时状态启动、停止和切换;需要时根据指令将超实时或实时关键时刻点的状态发送至“状态同步机”进行星地状态同步等.
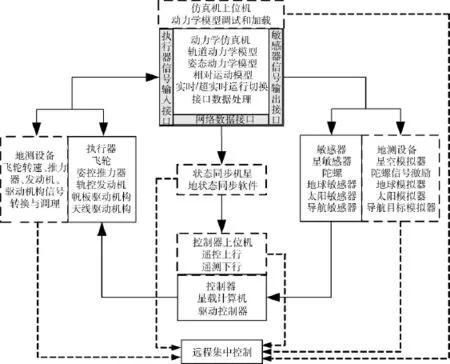
图2 快速半实物仿真系统结构与组成Fig.2 Structure and components of HIL system reconstructed
实时运行时,动力学仿真机间接驱动控制器的工作状态,在实时/超实时切换时,通过状态同步机直接驱动控制器进行状态跃变:状态同步机在切换启动前将动力学仿真机传来的状态数据进行处理、转换并自动生成遥控注数包,当远程控制台下达状态切换指令时,动力学仿真机随之动作,同时注数包通过控制器上位机自动上注至控制器,实现仿真机和控制器的同步联动切换.
整个系统的典型工作流程如下:
1)试验开始,系统运行在实时模式下,进行常轨的姿轨控试验,之后进入稳定运行阶段,星上暂无操作,等待一段时间后的长周期轨控任务测试;
2)设置动力学仿真机的超实时运行参数和条件,启动超实时运算,此时动力学仿真机实时和超实时两大功能模块同时运行,驱动整个系统时序的仍是仿真模型的实时部分;
通过黑棚和绿棚2组数据的对比可知,新梢高以绿棚稍大,地径以黑棚稍大,但两者的方差分析结果均未达到显著水平。
3)超实时运算结束,确认运算结果和状态是否满足要求,若否,重新设置参数和条件,再次启动超实时运算,若是,则发送指令将超实时结束时的状态传送至状态同步机;
4)状态同步机收到仿真机的数据后,进行识别、处理,转换成控制器状态切换注数包;
5)确认注数包及其他状态正常后,发送状态切换指令,动力学仿真机由当前实时状态切换至超实时运算停止时刻对应的状态,并以此为初始状态继续实时运行,与此同时,注数包上注至控制器,控制器随之状态跳变;
6)整个系统跳变至下一个有轨道控制任务的关键弧段前的某个时刻,进行轨道控制相关模式的试验,结束后再根据需要从第2)步开始重复以上操作,直至试验完成.
2.2 实时/超实时双模高精度动力学模型开发
为了保证整个模型尤其是超实时部分有足够的运算精度,首先要根据精度需要进行轨道动力学和姿态动力学数学建模.以某型具有高精度轨控任务的卫星为例,其轨控精度要求在十米级,较以往卫星有很大提高,在建模时其摄动项不仅要考虑地球摄动J2项,还需考虑更小摄动项J3、J4、J22、日月引力、太阳光压等摄动.姿态动力学部分同样是要根据卫星实际情况进行建模,对于构型复杂,具有多个大型挠性附件及多个大容积燃料贮箱的卫星,需同时考虑附件挠性及贮箱内的液体晃动.
超实时模块输入端信号主要有:超实时状态设置参数(超实时步长、超实时时长、超实时启动/停止/恢复实时开关、超实时/实时数据存储状态选择等)、超实时启动时刻对应的实时状态(时间、轨道、天体星历、姿态角度/角速度/控制模式等)赋值数据.输出端信号主要有:需存储监测的超实时状态数据、恢复实时时超实时赋给实时部分的运行结果数据(超实时停止时运算所得时间、轨道、天体星历、姿态数据及模式等).
动力学及运动学微分方程组是通过合适的数值积分算法求解,在以实时操作系统作为目标运行环境时,Simulink环境自身的求解器进行数值积分时只能定步长实时运算,积分步长不可调,所以对超实时模块部分,需将方程的数值积分过程用Simulink的分立模块搭建,并实现其步长、时长等参数可调.
2.3 状态同步机的实现
状态同步机通过一台高性能计算机及在其上运行的一套“星地状态同步软件”实现,通过网络接口与动力学仿真机及控制器上位机进行通讯.图3是软件运行界面,软件从动力学仿真机获得实时和超实时运行状态信息,然后将这些状态信息根据需要实时解算和处理成控制控制器状态需要的数据,并将结果数据自动生成控制器能识别的注数包,在动力学从超实时恢复实时的瞬间,同步将注数包上注至控制器,实现控制器的状态同步切换.

图3 星地状态自动同步软件界面Fig.3 User interface of auto-synchronization software
3 系统应用实例
以地球圆轨道卫星的两星相对运动控制任务为例对系统的应用情况予以说明.对于地球近圆轨道,两颗近距卫星之间的相对运动可用C-W方程描述,在相对位置和速度满足一定条件时,两星在轨道平面内的相对运动轨迹近似为封闭椭圆,椭圆重复周期与卫星的轨道周期相同.利用这一特性,可以进行两星之间的导引或伴飞控制律设计[10].
控制任务描述如下:两颗卫星分别称为追踪星和目标星,均运行于地球静止轨道,轨道周期24 h,追踪星位于目标星后方约44 km处,两星初始相对运动状态满足椭圆稳定伴飞条件,伴飞椭圆半径约4 km(小椭圆).伴飞一轨后利用双脉冲控制对追踪星进行制导控制,第一次脉冲喷气(启动控制)结束后追踪星沿一个半长轴约为转移距离一半(约15 km)的椭圆(大椭圆)开始轨道机动,经过约半个轨道周期(12 h),飞行半个椭圆到达目标星后方约14 km处,施加第二次脉冲控制(制动控制),使得追踪星减速,并相对于目标星近似沿半长轴约为3 km的小椭圆伴飞,由于存在控制误差,椭圆轨迹不是严格闭合,椭圆中心点也会发生漂移,为尽量使椭圆闭合,减少漂移速率,形成长期稳定伴飞,在第二次脉冲控制结束后择机进行一次伴飞形态修正.
两星初始轨道条件见表1.

表1 仿真初始轨道Tab.1 Initial orbit condition of simulation
在施加脉冲控制前后一段时间是轨道控制任务的关键时段,系统运行在实时状态,第一轨和最后一轨小椭圆稳定伴飞及两次脉冲控制之间的大椭圆飞行阶段无轨道控制动作,飞行过程用系统的超实时运行模拟.超实时运行过程中及结束后恢复实时模式时,卫星三轴姿态使用飞轮控制进行高精度稳定对地,在施加脉冲控制时,星体干扰力矩较大,使用姿控推力器进行姿态控制.
图4是超实时运行期间轨道平面内两星相对位置相位图,分为3个阶段,与之对应的是超实时共启停三次:试验开始时启动一次,一个轨道周期后停止并恢复实时,施加第一次脉冲控制,控制完成后启动第二次,沿大椭圆飞行半个轨道周期后停止并恢复实时,并等待第二次脉冲控制和伴飞形态修正控制,完成后启动第三次,一个轨道周期后停止并恢复实时,期间若超实时时长不够可以重复启动.
图5是姿控推力器和变轨发动机喷气数据曲线,横轴为实时试验时间,长度1 200 s,上图为轨控时姿控推力器喷气宽度值曲线,下图为轨控发动机喷气宽度值曲线.在实时运行状态,星地时差会导致星体姿态存在误差,若星地时差过大需进行修正,本实例在第一和第二次恢复实时状态后各进行了一次星地时差修正.
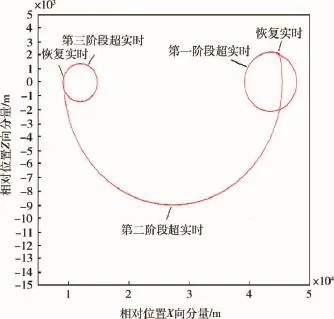
图4 超实时运行期间两星轨道平面内相对位置相位图Fig.4 Relative position of two spacecrafts in super real-time process
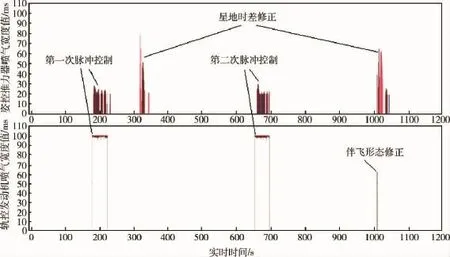
图5 姿控推力器和轨控发动机工作曲线Fig.5 Thrusters working course in real-time process
动力学实时仿真步长1 ms,超实时运行步长设置为1 s,加速比为1 000,3次超实时时长分别设置为24.5 h、12.6 h、24.5 h.若整个过程完整连续地用实时系统进行仿真,需耗时两天半,使用超实时后只需20 mins便完成试验.超实时运行时两星相对位置与速度与真实值的误差随着时间推移逐渐增大,三段超实时累积时长为61.7 h,产生的最大误差见表2,Y向为轨道面法向,地球静止轨道平面近似与赤道平行,变化很小,Y方向计算产生的误差很小,可近似为0,其余两轴量级相对于轨道控制精度(米级)来讲也都至少小一个数量级以上,完全满足系统的考核精度要求.

表2 超实时运行误差Tab.2 Errors induced by super real-time processing
4 结论
从应用情况看,在缩短试验耗时及轨控精度验证两方面,本文设计的系统达到了预期效果,可以将长达数小时或数天的轨道飞行控制任务在一个可接受的时间和精度范围内进行全程连续的半实物仿真验证,且由于是基于现有半实物仿真系统开发,相较重新开发一套新系统,工作量小,工程实现性强,具有在类似任务背景的航天器控制系统研制及验证试验中推广应用的价值.
[1] 张新邦.航天器半物理仿真应用研究[J].航天控制,2015,33(1):77-83.
ZHANG X B.The Research on application of hardware in the loop simulation for spacecraft[J].Aerospace Control,2015,33(1):77-83.
[2]张新邦.航天器全物理仿真技术[J].航天控制,2015,33(5):72-78.
ZHANG X B.The physical simulation technology for spacecraft[J].Aerospace Control,2015,33(5):72-78.
[3]马卫华,何勇.空间飞行器绕飞中控制系统的半实物仿真研究[J].中国电子科学研究院学报,2013,8 (2):119-124.
MA W H,HE Y.Research on hardware-in-the-Loop simulation platform for spacecraft control system in flyaround[J].Journal of China Academy of Electronics and Information Technology,2013,8(2):119-124.
[4]袁利,程铭.面向深空探测任务的飞控仿真与支持系统研究[J].空间控制技术及应用,2009,35(6):13-18.
YUAN L,CHENG M.Deep space exploration missionoriented flight control simulation and support system[J].Aerospace Control and Application,2009,35(6): 13-18.
[5]高薇,张强,孙军.通过超实时仿真验证轨控策略方法研究[J].航天控制,2008,26(2):71-73.
GAO W,ZHANG Q,ZHANG J.Method of validating orbit control strategy by super real-time simulation[J].Aerospace Control,2008,26(2):71-73.
[6]崔凯云.基于超实时仿真的航天飞控辅助决策[C]// 2008系统仿真技术及其应用学术会议.太原:中国自动化学会,2008.
[7]张强.通过STK软件验证轨控策略方法研究[C]//中国宇航学会深空探测技术专业委员会第七届学术年会.哈尔滨:中国宇航学会,2010.
[8]何朝斌.空间飞行器姿轨控系统地面仿真验证方法研究[D].哈尔滨:哈尔滨工业大学,2013.
[9]杨涤,李立涛,杨旭,等.系统实时仿真开发环境与应用[M].北京:清华大学出版社,2002.
[10]刘鲁华,孟云鹤,安雪滢.航天器相对运动轨道动力学与控制[M].北京:中国宇航出版社,2013.
Hardware-in-the-Loop Simulation System for Rapid Validation of High Accuracy Space Orbit Control Mission
ZHANG Xiaowei1,2,YUAN Yanhong1,2,WANG Jingji1,2,DAI Weizong1,2,HUANG Jingmei1,2,ZHANG Zetao1,2
(1.Shanghai Institute of Spaceflight Control Technology,Shanghai,201109; 2.Shanghai Key Laboratory of Aerospace Intelligent Control Technology,Shanghai,201109)
Based on the traditional hardware-in-the-loop(HIL)simulation system of spacecraft attitude and orbit control system(AOCS),a new simulation system is designed and realized for validation of time-consuming and high accuracy space orbit control mission.In this system,an approach is proposed,which can accelerate process of simulation experimentation by super real-time running of program in dynamics simulator.The implement planning,structure,components and working principle of the system are introduced.Then the two key problems are detailed,including exploring of the real-time&super real-time orbit and attitude dynamics model,and synchronization for states of hardware tested and test equipment.The system has been applied for development of AOCS successfully;its validity is illustrated by an instance.
hardware in the loop(HIL)simulation;super real-time;dynamics simulator;orbit control
V448
A
1674-1579(2016)04-0042-06
10.3969/j.issn.1674-1579.2016.04.008
张小伟(1981—)男,高级工程师,研究方向为航天器控制系统仿真;王静吉(1980—)男,高级工程师,研究方向为航天器轨道控制;袁彦红(1981—)男,高级工程师,研究方向为航天器控制系统测试技术;戴维宗(1988—)男,工程师,研究方向为航天器控制系统测试技术;黄京梅(1986—)女,工程师,研究方向为航天器相对运动控制;张泽涛(1987—)男,工程师,研究方向为航天器控制系统软件设计.
2016-03-27