提高航管二次雷达近程目标跟踪稳定性的方法*
2016-04-06中国西南电子技术研究所成都610036
邓 欣(中国西南电子技术研究所,成都610036)
提高航管二次雷达近程目标跟踪稳定性的方法*
邓 欣**
(中国西南电子技术研究所,成都610036)
**通信作者:xind829@163. com Corresponding author:xind829@163. com
摘 要:针对相控阵体制航管二次雷达系统在雷达近程探测空域内无法稳定监视目标的问题,提出了一种提高航管二次雷达系统对近程目标跟踪稳定性的方法。基于现有航管二次雷达系统的硬件架构,设计了在对监视空域进行航管扫描询问过程中密集插入对近程目标跟踪询问的工作方式,并给出了航管近程跟踪询问流程和波位随机同步跳转控制时序的详细设计方法以及对航管近程跟踪能力的估算方法。仿真计算结果验证了该方法的可行性和有效性。
关键词:相控阵天线;航管二次雷达;近程探测;扫描询问;稳定监视;近程跟踪询问
1 引 言
航管二次雷达(Secondary Surveillance Radar, SSR)系统[1-2]作为对空域目标的识别和监视系统,在空中交通管制、目标识别、信标跟踪等多方面得到了广泛应用,配置在如机场、航路、飞机和舰船等军事和民用领域的各类平台。航管二次雷达系统可完成对雷达覆盖空域的自主扫描探测,实现对协同飞机的定位、定高、身份识别及飞机航迹的显示,已成为空中交通管制的重要手段。
相对于传统的基于机械扫描的航管二次雷达系统,为了适应重点空域警戒功能而发展起来新体制航管二次雷达系统,采用相控阵询问天线体制,可实现对扫描波束的快速、灵活控制[2],且基于安装平台的不同需求,需兼具有进近管制和航路监视的能力。为保证对整个雷达探测空域的实时监控和稳定监视,要求航管二次雷达系统能够实时获取连续、稳定的飞机航迹信息[3-4]。但采用现有的航管工作方式,在雷达近程探测范围内存在监视不稳定区域,尤其当飞机进行大机动飞行(速度快、转弯半径小) 时,会出现飞机航迹断续不连贯的问题。存在近程航路监视不稳定问题的主要原因是:为保证航管目标航迹的准确度,对目标角度变化率设置了相应的门限τ,超出该门限值,则判定接收数据为无效数据而剔除;对远距离的目标进行扫描监视时,在扫描周期内目标运动相对雷达视角变化较小,两次测量目标的角度差在门限范围内,可进行航迹相关[5],但当飞机相对于航管二次雷达近距离飞行时,目标相对雷达角度变化大,测量角度数据极易超出门限值而被剔除。因此,出现目标航迹断续现象。
针对以上问题,现有的国内外航管二次雷达系统大多采用进近管制二次雷达和航路监视二次雷达组合配置的方式[5],确保同时满足对近、远程目标精确、稳定监视的使用需求。
本文基于采用相控阵询问天线的航管二次雷达系统,提出了一种提高对近程目标精确探测和稳定跟踪能力的方法。通过对航路监视二次雷达的工作时序优化设计,在航管扫描询问的工作方式下插入对近程目标的跟踪询问,无需增加二次雷达数量便可实现对雷达覆盖空域内飞机的全程稳定监视和提供准确的目标特征信息。
2 航管二次雷达系统工作原理
航管二次雷达系统主要由相控阵询问天线、旁瓣抑制天线和询问主机等组成,如图1所示。其中询问天线由天线辐射口面、T/ R组件、波束形成网络和波控器等组成,询问主机由询问信道、航管信号处理分机和航管主控分机等组成。
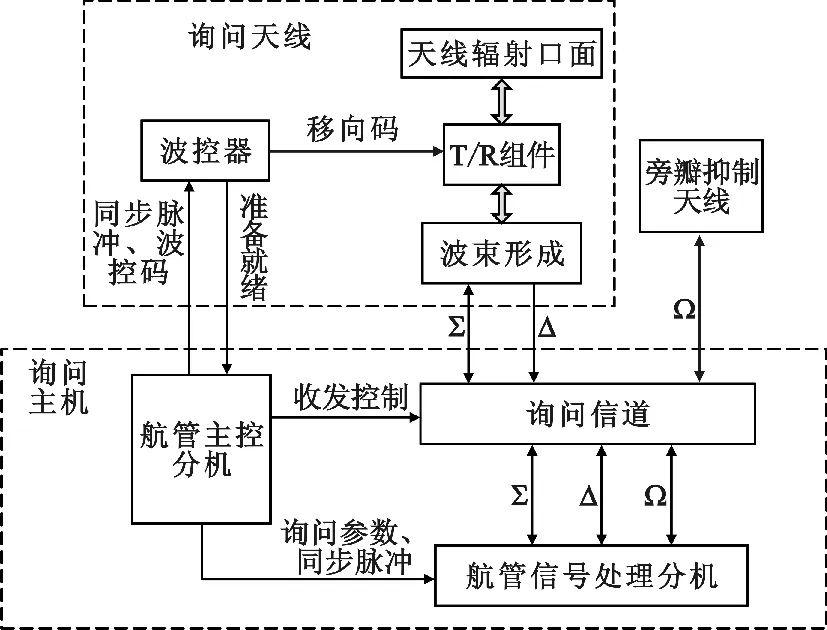
图1 航管二次雷达系统组成框图Fig. 1 Block diagram of SSR system
航管二次雷达采用和差单脉冲测角方法,只需进行一次询问即可精确测量飞机应答脉冲信号的到达方位,并将该方位数据用于建立飞机航迹。来自飞机的航管应答信号经过T/ R组件的移向和放大后,再通过波束形成中的功率合成器和和差器形成和信号和差信号,送入询问主机进行信号解析和测角、测距等工作。
在航管扫描询问时,首先,由航管主控分机向询问天线的波控器发送天线指向信息,波控器将天线指向转换成包含所有T/ R组件移相信息的移相码,控制天线指向切换至航管询问方位;其次,由航管主控分机将询问参数送至航管信号处理分机,并触发航管信号处理分机产生航管询问信号和旁瓣抑制信号,在航管信号处理分机中完成对接收的飞机应答信号进行信号处理、测角、测距和形成目标点迹信息;最后,由航管主控分机进行点迹融合和建立目标航迹。航管主控分机对询问信道进行收发控制和工作状态控制。
基于近程目标相对于雷达天线快速机动的特点,本文方法采用对近程目标的定位和跟踪算法,由航管主控分机统一管理航管工作流程和对各分机、模块的综合调度,航管主控分机根据对飞机各次测量数据的相关度,建立对近程目标跟踪询问的任务需求,在航管扫描流程中插入近程跟踪询问。
3 本文方法
3. 1 近程目标跟踪询问流程
在预先设定的相对雷达天线的近程区域内,对于已建立航迹的近程目标,选取其中距离航管二次雷达最近的P批目标进行自动跟踪询问,或者通过人工干预的方式在人机交互界面手动选取跟踪目标。
对近程目标的航管跟踪询问流程如图2所示,主要在航管主控分机中完成,具体说明如下:
(1)对询问信道进行扫描询问功率、灵敏度时间控制(Sensitivity Time Control,STC)后,启动航管扫描询问,航管主控分机对已建立航迹的目标进行筛选,如存在近程目标则进入第2步;
(2)判断在一个跟踪周期内已跟踪的近程目标数量是否超过预先设定的跟踪目标批数P,如是则返回第1步,否则转至第3步;
(3)判断在扫描询问中近程目标的航迹稳定性,即在扫描限制数范围内检测到的点迹数据与已建立的航迹数据是否具备相关条件(在幅度和位置信息判决门限的范围内),如是则返回第1步,否则判定近程目标的航迹不稳定,建立近程跟踪询问的任务需求,转至第4步;
(4)暂停航管扫描询问,缓存扫描参数,对询问信道进行近程跟踪询问功率、STC控制;
(5)定位 将询问天线的波束宽度作为大步进波束跃度,以最近一次探测到的目标位置为中心,进行连续三个方位的近程跟踪询问;
(6)预推 根据以往的目标数据计算出目标的运动方向、速度等参数,并根据目标跟踪询问周期预测下一次跟踪询问的方位[6];
(7)跟踪 在下一跟踪询问周期到来时,根据预测的目标方位,在航管扫描询问中插入对目标的近程跟踪询问,在一个跟踪周期内只需进行一个方位的跟踪询问便可获得准确的目标态势信息,建立稳定的航迹;在每个跟踪周期的近程跟踪询问完成后,恢复航管扫描设置,返回至第1步。
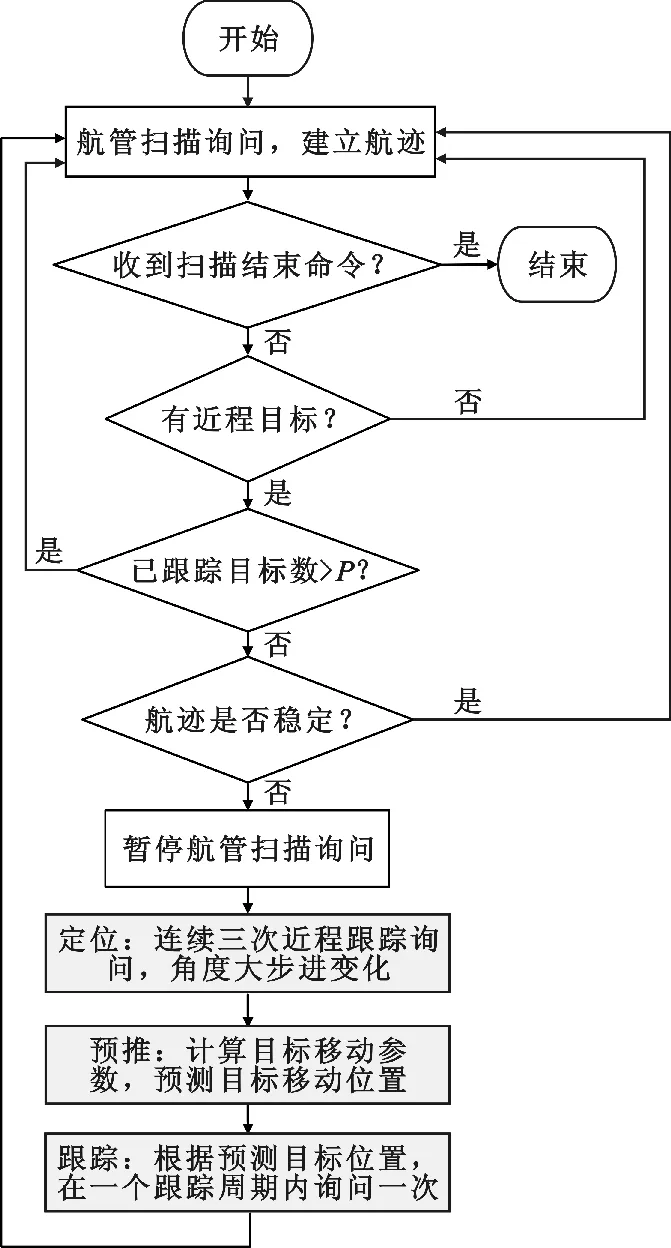
图2 近程目标跟踪询问流程图Fig. 2 Flow chart of short-range tracking interrogation
3. 2 波位快速同步跳转控制时序设计
在航管二次雷达系统中,航管扫描询问周期应不超过航管的数据更新时间。因此,在航管的工作时序方面,提出了波位快速同步跳转控制的时序设计方法,以实现航管扫描询问中密集插入近程跟踪询问且满足数据更新时间的要求。
将航管监视空域均匀划分为以波位号代表波束指向、每一波位预留相同时间窗的N个连续波位,为确保扫描波束对航管监视空域的全覆盖并提高测角精度,如图3所示,相邻波位间隔的经验取值为不超过询问天线波束宽度的1/2,表达式为

式中:φa为航管监视空域范围(方位面);θ3dB为询问天线方位面的波束宽度。
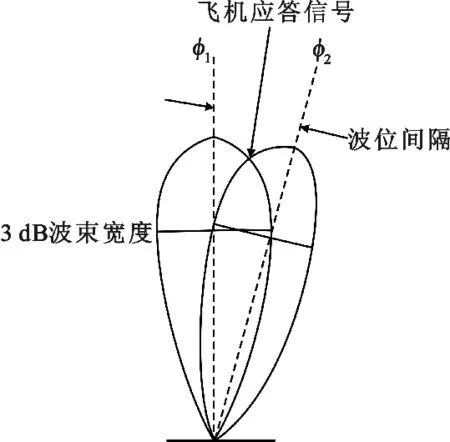
图3 扫描波位间隔示意图Fig. 3 Diagram of scan beam position space
为保证近程跟踪询问能够随时暂停航管扫描询问,且不影响航管扫描询问的航迹质量,时序设计示意图如图4所示。
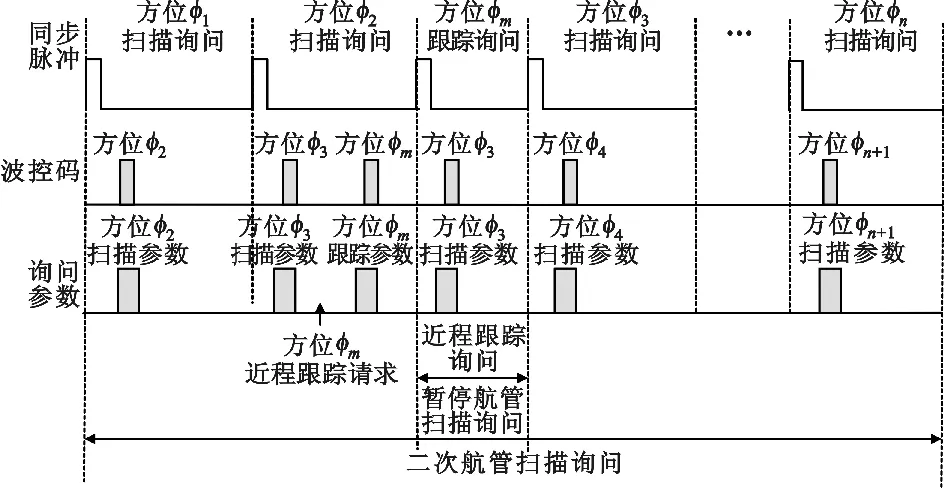
图4 航管控制时序设计示意图Fig. 4 Diagram of SSR control time sequence design
具体设计为:按照波位号对应的方位φ1,φ2, …,φN上依次完成航管扫描询问,以实现对整个雷达覆盖空域的扫描监视。航管主控分机根据航管扫描询问和航管近程跟踪询问的询问驻留时间计时产生同步脉冲信号;在对方位φ1进行扫描询问时,航管主控分机预先将扫描方位φ2的波位号和询问参数分别置入波控器和航管信号处理分机,在航管主控分机对方位φ1的扫描询问计时结束后,向波控器和航管信号处理分机同时发出方位φ2扫描询问的同步脉冲信号,同步脉冲信号触发波控器切换天线指向至φ2,并触发航管信号处理分机开始扫描方位φ2的询问处理工作。如在方位φ2的扫描询问期间,航管主控分机检测到在方位φm有近程目标且目标航迹不稳定,则重新向波控器和航管信号处理分机发送近程跟踪方位φm的波位号和询问参数,待方位φ2的扫描询问结束后,暂停航管扫描询问,发送同步脉冲,进行对方位φm的近程跟踪询问,并将计时调整为近程跟踪询问时间。在近程跟踪询问期间,航管主控分机预先将扫描方位φ3的波位号和询问参数分别置入波控器和航管信号处理分机,待近程跟踪询问结束后恢复航管扫描询问。
波位快速同步跳转控制的时序设计实现了航管工作效率的最优化,且同时确保了航管近程跟踪询问不会影响航管扫描询问的目标航迹稳定性,具体分析如下:以相对雷达天线30 km的近程目标为例,对近程目标进行一次跟踪询问(根据测角精度要求在一个方位连续询问至少8次)的时间在8 ms之内,以目标方位为中心,最多进行连续3个波位近程跟踪询问后便立即返回航管扫描询问,且天线指向由扫描方位切换至近程跟踪方位的时间是微秒级的,因此航管近程跟踪询问对航管扫描询问的占据时间小于24 ms,在近程跟踪询问期间,飞机位移相对航管二次雷达的角度变化远小于天线的波束宽度,不会影响航管扫描询问中对除近程跟踪目标外的飞机的航迹质量。
3. 3 航管近程跟踪能力估算
航管扫描数据更新时间Tsud可用以下关系式表示:

式中:Tscw为扫描波位的驻留时间窗;Ttk为暂停一次航管扫描询问的近程跟踪询问的占据时间;Ntk为在航管扫描数据更新周期内近程跟踪询问次数。
为保证航管测角的准确度,每个波位的询问次数应大于8次,则每个波位驻留时间窗应满足

式中:Tss为航管扫描询问中单次询问信号处理时间;Tpls为同步脉冲的脉宽,为微秒量级,相对于毫秒量级的Tscw可忽略,即

同理,为满足测角精度要求,近程跟踪询问在一个方位的询问次数应大于8次,且在一次暂停航管扫描询问的时间内,以目标方位为中心,最多进行连续3个波位的近程跟踪询问。因此,一次近程跟踪询问的占据时间Ttk表示为

式中:Tts为航管近程跟踪询问中单次询问信号处理时间。
将式(4)和式(5)代入式(2)中,并结合式(1) 中N的取值范围,可得以下关系式:

在一个航管扫描数据更新周期内,近程跟踪询问的占据次数Ntk满足

式中:P为航管能够同时近程跟踪的目标批数,单位为批/ s。
将式(7)代入式(6)中可得P的取值范围,即

根据航管二次雷达系统的询问频率不能超过航管最大询问率的要求[7],P还需满足以下关系式:

式中:fSSR为航管最大询问率。将式(1)代入式(9),可得出

因此,P需同时满足式(8)和式(10)的取值条件,由此可得出航管二次雷达系统能够跟踪近程目标的最大数量Pmax,这个数值也反映出航管二次雷达系统对近程目标的跟踪能力。
实际应用中,在满足航管近程跟踪能力的同时,还需确保近程跟踪目标在各种机动飞行情况下的航迹质量。因此,航管二次雷达系统对近程目标的跟踪询问周期可由飞机的飞行轨迹和机动情况进行自适应调整。如当飞机进行大机动飞行时缩短近程跟踪询问周期,反之亦然。但在航管扫描数据更新时间内,总的近程跟踪询问波位数不能超过3PmaxTsud。
4 仿真计算分析
为验证本文方法的可行性,对上节给出的航管二次雷达系统能够实现稳定跟踪的最大近程目标数量进行仿真计算。以某航路监视二次雷达系统为例,该二次雷达系统采用一维相控阵询问天线,航管扫描数据更新时间为Tsud=10 s,航管监视空域范围(方位面)φa= 360°,航管扫描询问最大距离为400 km,对30 km内的目标进行航管近程跟踪询问, 按ICAO附件10[7]的规定,航管最大询问频率fSSR= 450 Hz,由此估算出Tss=3 ms,Tts=1 ms(考虑航管应答容量[7])。
表1给出了不同天线波束宽度情况下,利用第3节的估算方法,对航管二次雷达系统可进行稳定跟踪的最大近程目标数量的仿真计算结果。由表1可知:相比现有航管二次雷达系统不具备对近程目标的跟踪能力且对近程目标监视能力较弱的情况,本文方法可有效实现对近程目标的跟踪和稳定监视,且几种天线波束宽度情况下的最大跟踪目标批数Pmax也满足实际近程监视空域的飞机数量和使用需求。由表1的数据进行对比分析得出:天线半功率波束宽度越大,航管二次雷达系统能够稳定跟踪的目标数量越多,但波束宽度增大的同时又会降低航管的测角精度。因此,在天线的设计上需同时兼顾航管二次雷达系统的近程目标跟踪能力和测角精度的要求。
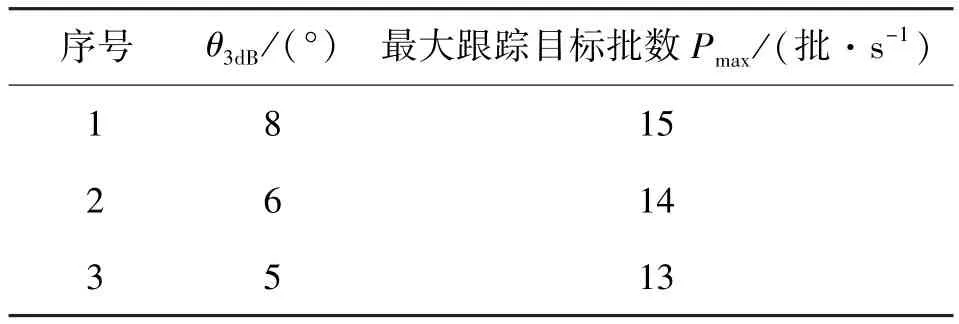
表1 航管二次雷达系统最大跟踪目标数量仿真计算结果Tab. 1 Results of the maximum quantity of SSR system tracking short-range targets
5 结束语
本文提出了一种适用于航管二次雷达系统的提高对近程目标跟踪稳定性的方法,通过在对监视空域航管扫描询问的过程中密集插入对近程目标跟踪询问的工作方式,可有效提高对近程目标监视的稳定性和准确性,解决了现有航管二次雷达系统由于扫描询问周期的限制无法对相对雷达天线的近距离大机动飞行目标进行稳定监视的问题。本文在不影响已有远程监视能力的前提下对航管二次雷达系统航管近程跟踪能力进行了详细的推导分析。几种天线波束宽度情况下可稳定跟踪的最大目标数量的仿真计算结果验证了本文方法的可行性和实用性。
本文方法是在现有相控阵体制航路监视二次雷达系统的硬件架构基础上实现的,只涉及航管工作流程的改进设计。因此,可应用于航管监视二次雷达系统提升对近程目标跟踪能力的升级改造。
本文方法仅适用于提高对已建立航迹的近程目标的跟踪能力,但对于二次雷达系统只获取到点迹信息、未建立航迹或无法建立航迹的目标如何进行跟踪和建立精确航迹的问题还需做进一步的研究。
参考文献:
[1] STEVENS M. Secondary surveillance radar[M]. Boston: Artech House,1988.
[2] 山秀明.航管二次雷达[M].北京:国防工业出版社,1983.
SHAN Xiuming. Secondary surveillance radar[M]. Beijing: National Defense Industry Press,1983. (in Chinese)
[3] 张光义,赵玉洁.相控阵雷达技术[M].北京:电子工业出版社,2010.
ZHANG Guangyi,ZHAO Yujie. Phased array radar technology[M]. Beijing:Publishing House of Electronics Industry,2010. (in Chinese)
[4] 贾坤.航管二次雷达数据处理[J].电讯技术,2011,51 (6):78-81.
JIA Kun. Data processing of secondary surveillance radar for air traffic control[J]. Telecommunication Engineering, 2011,51(6):78-81. (in Chinese)
[5] 张尉.二次雷达原理[M].北京:国防工业出版社,2009.
ZHANG Wei. Secondary surveillance radar theory[M]. Beijing:National Defense Industry Press,2009. (in Chinese) [6] 吴顺君,梅晓春.雷达信号处理和数据处理技术[M].北京:电子工业出版社,2008.
WU Shunjun,MEI Xiaochun. Radar signal processing and data processing technology [ M ]. Beijing: Publishing House of Electronics Industry,2008. (in Chinese)
[7] ICAO Annex 10 VolumeⅣ,Surveillance and collision avoidance systems[S].

邓 欣(1982—),女,陕西汉中人,2007年于西安电子科技大学获硕士学位,现为工程师,主要研究方向为二次雷达和阵列信号处理。
DENG Xin was born in Hanzhong,Shaanxi Province,in 1982. She received the M. S. degree from Xidian University in 2007. She is now an engineer. Her research concerns secondary radar system and array signal processing.
Email:xind829@163. com
A Method for Improving Secondary Surveillance Radar System’s Short-range Targets Tracking Stability
DENG Xin
(Southwest China Institute of Electronic Technology,Chengdu 610036,China)
Abstract:For the problem that short-range targets are unable to be surveilled stably by secondary surveillance radar(SSR) system based on phased array antenna(PAA),a method is proposed to improve the SSR system's stability of tracking short-range targets. Based on the hardware architecture of the existing SSR system,a new operation mode is designed to insert short-range tracking interrogations intensively in the process of SSR scan interrogation. The flow of short-range tracking interrogation and the time sequence design of beam position jumping synchronously are presented,and an estimation method of the capability to track short-range targets is also introduced. Simulation result validates the feasibility and effectiveness of the proposed method.
Key words:phased array antenna;air traffic control secondary surveillance radar;short-range detection; scan interrogation;stable surveillance;short-range tracking interrogation
doi:10. 3969/ j. issn. 1001-893x. 2016. 02. 015引用格式:陈瑶瑶,郝建华,张子博.端到端语音加密通信的同步信号设计[J].电讯技术,2016,56(2):195-200. [CHEN Yaoyao,HAO Jianhua, ZHANG Zibo. Design of synchronous signal for end-to-end speech encryption communication[J]. Telecommunication Engineering,2016,56 (2):195-200. ]
作者简介:
中图分类号:TN958. 96
文献标志码:A
文章编号:1001-893X(2016)02-0190-05
*收稿日期:2015-08-03;修回日期:2015-12-18 Received date:2015-08-03;Revised date:2015-12-18