与强度无关的位置指纹在线定位改进算法*
2016-04-06江春冬陈云飞杜太行河北工业大学控制科学与工程学院天津30030河北省控制工程研究中心天津30030
江春冬,惠 慧,陈云飞,杜太行,2(.河北工业大学控制科学与工程学院,天津30030;2.河北省控制工程研究中心,天津30030)
与强度无关的位置指纹在线定位改进算法*
江春冬**1,2,惠 慧1,陈云飞1,杜太行1,2
(1.河北工业大学控制科学与工程学院,天津300130;2.河北省控制工程研究中心,天津300130)
Foundation Item:The MIIT Topic(12-MC-KY-14)
**通信作者:chundong_j@163. com Corresponding author:chundong_j@163. com
摘 要:将现有的研究较热的固定发射端、定位接收端的室内位置指纹定位系统应用到固定接收端、定位发射端的室内无线电干扰源定位中,研究了一种考虑干扰源发射强度的在线定位算法,以克服直接使用以一固定发射强度信号源建立的指纹数据库和现有的在线定位方法无法实现对不同发射强度干扰源定位问题。在分析信号传播模型和现有在线定位方法的基础上,利用强度差的均方差进行定位计算。给出了算法实现依据和流程,对改进的算法进行了仿真和实验验证,结果证明了改进算法的实用性。同时,改进算法的思想对现有的考虑接收端异质的位置指纹定位系统也有一定的指导意义。
关键词:位置指纹定位;干扰源强度;在线定位方法
1 引 言
位置指纹定位算法是当前研究较热的室内无线电定位方法,它一般利用特定场所现有的无线局域网(Wireless Local Area Network,WLAN)中的固定接入点(Access Point,AP),建立以场强(Radio Signal Strength,RSS)为参考点(Reference Point,RP)处的特征参数的指纹数据库,再用相应的定位算法对移动终端进行定位。系统中固定接入点是发射端,被定位的移动终端是接收端[1-2]。位置指纹定位算法概念清晰,定位精度受定位环境、特征参数测量、参考点稀疏程度、在线定位时的定位算法等因素的影响有所不同,但都有初步的研究结果且定位结果基本上能达到要求[3]。
考虑到位置指纹定位算法的优点,期望将其用于固定接收端、定位发射端的室内无线电干扰源的定位查找上。两者看似仅仅将接收装置和发射装置的位置进行了调换,但实际上会引起较多的问题。问题之一就是被定位的干扰源发射信号的强度不同,使用以某一固定发射强度的信号源建立的指纹数据库和常用的在线定位方法在线定位时,定位结果是不可靠的。现有文献中的位置指纹定位系统由于固定的是发射端,其发射功率是不变的,接收端使用的手机、PAD等设备接收差异不大,所以考虑建库时的信号强度和定位时的信号强度的情况较少。文献[1,4-5]提出了接收端异质情况下的位置指纹定位系统,给出了场强差作为指纹特征建立指纹数据库的定位方法,改变的是指纹数据库的特征量。这种方法对固定点AP个数较多的情况下比较有效,而在无线电干扰源位置指纹定位系统中,由于固定的接收端需要额外配置,价格不菲,安装的个数有限,使用场强差建立数据库会减少数据库中矢量的个数而影响定位结果。
鉴于此,本文研究了无线电干扰源位置指纹定位系统中不改变指纹库特征量时的在线定位方法,在原有近邻法(Nearest Neighbor,NN)、K近邻法(K Nearest Neighbor KNN)和加权K近邻法(Weighted K Nearest Neighbor,WKNN)的基础上,提出了改进的定位方法,讨论了方法的思想和可行性,并用实验进行了验证,所得的结果证明了方法的可靠性,同时也可为类似问题提供一定的参考。
2 改进算法理论依据
改进算法是在信号传播模型及位置指纹定位算法中常用的在线定位方法的基础上想到并加以改进的。
2. 1 信号传播模型
在自由空间中,无线信号的场强传播模型可表示为

式中:PR、PT分别为接收信号和发射信号的功率; GR、GT分别为信号接收增益和发射增益;λ为信号的波长;d为发射端到接收端的距离[1,6]。
信号功率与以dB为单位的场强表达关系为

在复杂室内空间中,由于环境对无线电信号的传播影响很大,往往通过计算路径损耗再计算接收端接收到的场强值,即

式中:各量的单位均为dB或dBm; RSS [ PR]、RSS[PT]分别为接收信号和发射信号的强度;PL为路径损耗;Xσ高斯噪声,为正态分布的随机数。
室内环境中路径损耗的计算模型主要使用对数距离损耗模型,其表达式为

式中,PL( d0)表示自由空间中d0处接收信号的路径损耗;d0为参考距离,通常取1 m;d为接收端到发射端的距离,单位为m;n为传播损耗系数,它与传播环境密切相关,不同环境下,该值取不同值,针对具体环境,该值可由测量的值整定,自由环境中,该值取2[7-8]。
2. 2 位置指纹定位系统常用在线定位方法
以场强为特征量建立的指纹数据库在线阶段常用的匹配算法有最近邻法、K近邻法和加权K近邻法[9-11]。
(1)最近邻算法(NN)
当测试点测得的场强信息为x=(x1,x2,x3,…, xm)时,针对每一个参考点,由公式(5)求取测试点和参考点关于场强的矢量欧几里德距离:

取最小距离所对应的参考点的坐标作为定位结果的输出坐标。
(2)K近邻算法(KNN)
K近邻法是在最近邻法的改进。它在利用式(5)求取距离后,不是取最小的一个距离,而是依次取从小到大的K个最小距离,对这K个距离所对应的坐标,求其平均值作为输出,具体K取多大的值,文献[2,5]中都进行了研究,综合考虑运算复杂度和定位准确度情况,K值取3或4较好。
(3)加权K近邻法(WKNN)
加权K近邻法又是对K近邻法的一种改进。K近邻法选取的K个最小距离对最后的定位结果贡献相同,取的是平均值,但距离越小应该对定位结果坐标贡献越大。因此,对所取的K个最小距离进行权值分配,距离越小,权值越大。K个权值wk之和为1。至于wk如何给定,可自行设定,也可由式(6)算出:

3 改进算法的思想与实现
从式(3)信号传播的模型可以看出,接收的信号强度不仅与环境有关,还与发射信号强度、发射模块增益、接收模块增益都有关系。而在对信号源进行位置指纹定位时,接收端的增益可以固定,发射端的增益和发射源功率均不确定,也是未知的。当以固定的发射源获得参考点的指纹信息后,对范围内的不同发射源进行在线定位时,直接采用近邻法、K近邻法或者加权K近邻法进行定位就会出现很大问题。以近邻法为例,由于接收端接收不同发射源得到的场强不同,最近距离的未必是真实发射源的位置。因此,要对在线定位算法进行改进。
前已论及,在固定接收端对发射源进行定位时直接用场强差作为特征参数是不合适的,因为接收端数目有限。因此,我们仍旧选择针对某一固定发射端获得参考点指纹数据库信息,特征量仍旧为接收的场强。
根据式(3)和式(4)可以得出,式(3)中等号右侧的第二项与发射端的发射强度无关,只与距离有关。当参考点的坐标固定时,PL项理论上可认为是确定的。而发射源的强度不仅与发射源的功率有关,还与发射模块和发射天线相关,这个强度就包含了发射端的这些因素。
这样,针对一种发射源确定的参考点i处,即使x和xi矢量距离最小,但由于两个发射源的强度不同,也不能说明x位于xi附近,或者认为xi所在的位置就是x的位置。根据式(3)和式(4),对于同一位置处强度不同的两个发射源,由于同一接收端接收到的场强差由于只包含发射源强度信息和噪声,故不同接收端接收到的场强的强度差理论上是相近的,于是对在线定位阶段的定位算法进行了改进,将矢量距离的计算公式式(5)改写为

算法实现由图1所示的流程图来表示。

图1 改进定位算法流程图Fig. 1 Flowchart of the improved location algorithm
改进算法具体步骤描述如下:
(1)将各固定的接收端检测到的针对某一测试点处的无线信号场强信息传送到服务器,形成检测强度矢量;
(2)用指纹数据库中每一参考点处指纹矢量与检测的强度矢量作差,形成新的数据库;
(3)对每一个矢量差矢量求取均方差;
(4)对均方差进行排序;
(5)利用改进最近邻法、K近邻法或加权K近邻法对检测的矢量进行定位。最近邻法就是均方差最小的那个矢量点所在的位置就是测试点的位置, K近邻法、加权K近邻法与前面一样就不难理解了。
4 改进算法仿真验证
4. 1 仿真条件
为验证改进算法合理性,进行了仿真验证。选择100 m×100 m正方形区域为仿真区域,以横纵坐标均为5 m的间距将其离散化为二维坐标图,参考点的个数为441个;实验区域内依次安放8个AP点接收端并编号,其二维坐标为分别(2,2)、(22, 98)、(42,2)、(62,98)、(82,2)、(98,98)、(2,52)、(98,52),同时选择22个测试点进行了相关的定位测试。数据库的建立在考虑环境噪声的情况下,选取发射信号源强度为10 dB,利用信号传播模型计算各AP点测量的参考点处的强度信息,并按AP点排好的顺序存储在指纹数据库中。参考点与测试点的位置关系见图2,图2中横轴为定义的X坐标,单位为m;纵轴为定义的Y坐标,单位为m;横纵坐标范围代表仿真区域大小。

图2 参考点与测试点关系Fig. 2 Relationship between the reference and test points
4. 2 改进前算法针对一个测试点的定位结果
发射源发射功率选择5 dB、10 dB和20 dB,分别对上述3种定位方法进行了实验,限于篇幅,只给出针对一个测试点(24,27)的3种算法的定位结果和误差(误差单位为m),见表1。
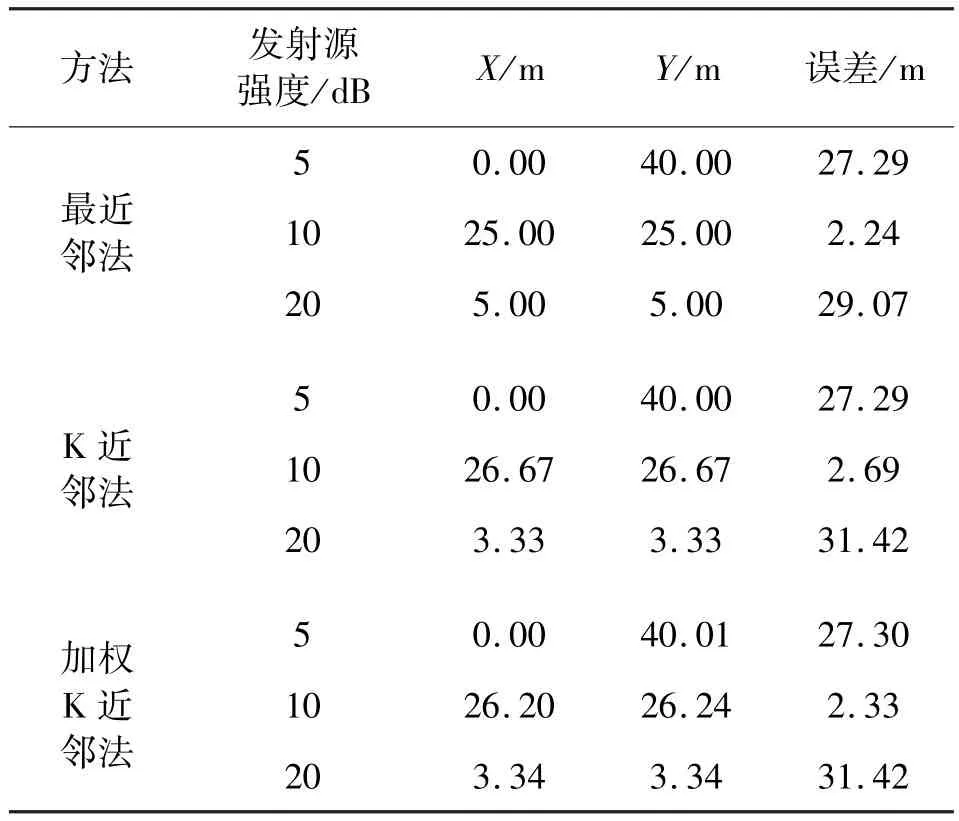
表1 测试点(24,27)改进前算法定位结果Tab. 1 Positioning results of the test point(24,27) before the algorithm is improved
从表1中可以看出,由于建立数据库时发射源强度为10 dB,故针对10 dB的发射信号定位结果较准,说明了算法的正确性。其他两种强度的发射源定位结果误差过大,定位结果是完全不符合实际要求的。因此,直接应用此算法定位是错误的。
4. 3 改进后算法针对相同测试点的定位结果
针对发射功率分别为5 dB、10 dB和20 dB的发射源,用改进的定位算法对各测试点进行定位实验,对前面的测试点(24,27)定位结果和误差见表2。
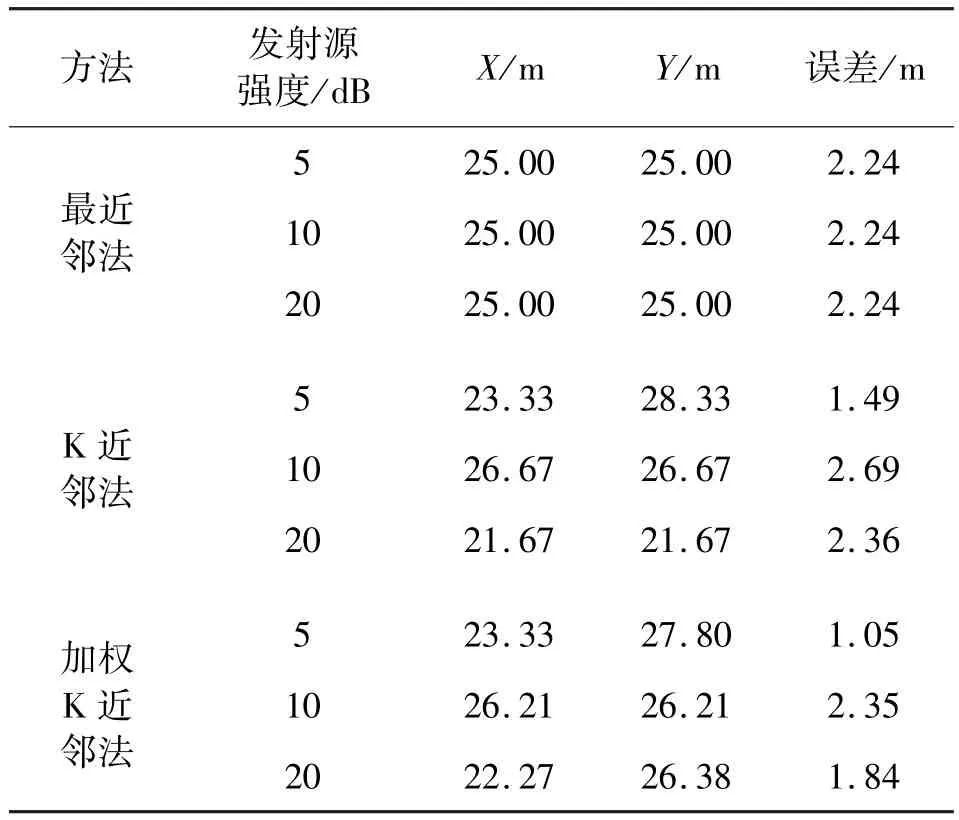
表2 测试点(24,27)改进后算法定位结果Table 2 Positioning results of the test point(24,27) after the algorithm is improved
表2数据说明,改进后的算法无论对与参考点测试强度相同还是不同的发射源都能实现较好的定位,定位精度亦可接受。
4. 4 改进后算法针对所有测试点的仿真定位测试
图3(a)~(c)分别给出了使用改进后的算法对发射强度分别为5 dB、10 dB和20 dB发射源使用3种定位算法进行定位的误差曲线,横坐标为误差值,单位为m;纵坐标表示误差在对应值下的测试点的百分数。

图3 强度分别为5 dB、10 dB和20 dB时的误差曲线Fig. 3 Error curves for 5 dB,10 dB and 20 dB strength
从图3可以看出,改进的算法仿真时能够实现对不同发射源强度的干扰源进行定位,定位误差绝大多数在4 m以下的占95%以上,只有个别几个点的定位误差大于5 m。从图3中还可以看到,3种算法的误差最近邻法误差较大,K近邻法和加权K近邻法在K取相同值时误差差别不大。
5 改进算法实验验证
5. 1 实验环境与实验条件
为进一步验证改进算法合理性,在实际环境中进行了指纹数据库的测试建立并选择一定的测试点进行了定位计算。以实验室所在楼层的一部分为定位区域进行了实验验证。实验区域大概为20 m× 10 m,包括3间实验室和对应的走廊。以Z字型安放4个SA44B测量接收机,以约1. 5 m的间距设置54个参考点,并且在区域内选择20个测试点进行了定位测试。AP点、参考点、测试点在定位区域内的示意图如图4所示。
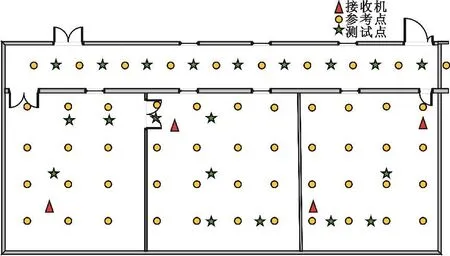
图4 实验区域AP点、参考点、测试点位置图Fig. 4 The location map of AP point,the reference point and the test point in the experimental area
实验所用的发射源为频率和强度均可调的TFG6300信号发生装置,指纹数据库建立时发射源的发射功率选择为最大的13 dB。测试点进行测试时分别在不同时间段选择发射源的强度为13 dB和7 dB进行了数据采集。坐标原点选择在实验区域的左下角,以1. 14 m为间隔将其离散化为二维坐标区域。
5. 2 改进后算法针对所有测试点的实验定位测试
图5(a)和(b)分别给出了使用改进后的算法对发射强度分别为7 dB和13 dB发射源使用3种定位算法进行定位的误差曲线,曲线含义与仿真时相同。
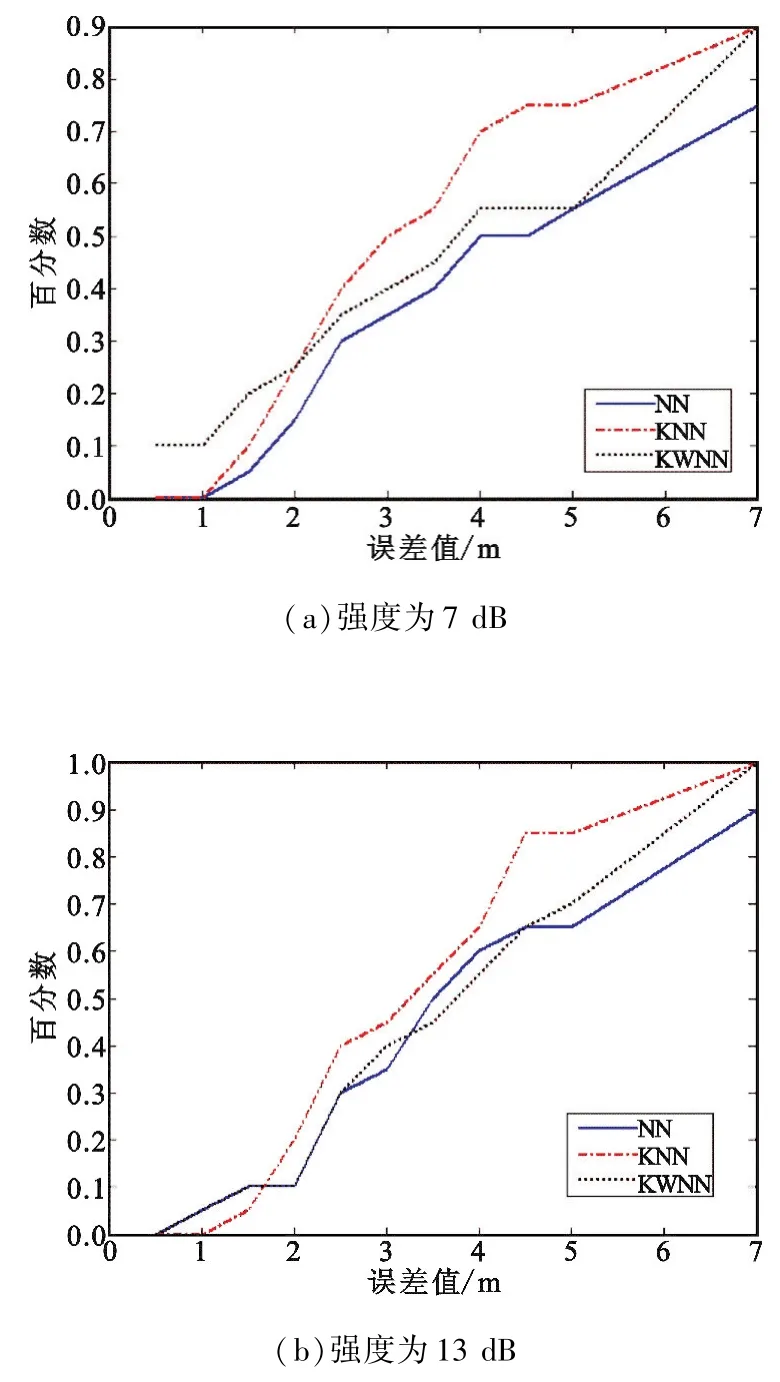
图5 强度分别为7 dB和13 dB时的误差曲线Fig. 5 Error curves for 7 dB and 13 dB strength
从图5中可以看出,针对具体的实验区域,算法对不同强度的发射源仍旧能够实现定位。定位精度在4 m以内的达到60%,对两种强度的信号源定位精度基本相同,但定位精度比仿真时差一些。从图5中还可以看出,最近邻法定位精度最差,K近邻法定位精度较好,加权K近邻法在两者之间。
5. 3 定位误差产生原因分析
无论仿真过程还是实验过程都会产生定位误差,且实验时误差较大,具体误差产生原因包括:
(1)仿真时在强度测量时只加了固定的随机噪声,实际实验环境要复杂得多,故实际误差较大;
(2)特征量检测时由于干扰的存在,需要进行多次数据采集并利用一定的算法进行处理,数据个数和处理方法也会影响到定位精度;
(3)参考点的稀疏对最近邻法的精度影响较大;
(4)K值的选取对K近邻法和加权K近邻法的定位精度也有一定的影响。
上述这些影响因素在其他论文中会进一步加以研究。
6 结束语
本文研究的位置指纹定位系统与文献中的发射端和接收端位置不同,由此引起一系列问题。本文对实现不同强度干扰源进行定位的在线定位算法进行了改进,给出了改进算法的思想、原理和实现流程;分别通过仿真和实验对改进的算法进行了验证,说明改进算法对发射信号强度不敏感,证明了算法的可行性;并用多个测试点验证了改进后算法对不同强度信号源的定位精确度。仿真和实验结果表明,改进的算法对不同强度的信号源使用最近邻法、K近邻法和加权K近邻法都能够实现定位。此外,该算法不仅对强度不同的信号源能够定位,而且,如果信号源发射模块增益不同,发射源频率不同(但需要在同频段范围),把这些因素归至发射源强度上,改进的算法一样可以实现较好的定位;该定位算法的思想可以应用到现有的结接收端进行位置指纹定位系统中,可以避免接收端接收模块增益不同的影响。
参考文献:
[1] 谢代军.无线局域网室内定位技术研究[D].郑州:解放军信息工程大学,2013.
XIE Daijun. Research on WLAN indoor location estimation technology[D]. Zhengzhou:PLA Information Engineering University,2013. (in Chinese)
[2] ZHOU M,XU Y B,MA L. Adaptive autocorrelation approach for fingerprint-based distance dependent positioning algorithms in WLAN indoor areas [J]. Journal of Network,2011,6(10):1475-1482.
[3] 刘洺辛,孙建利.基于能效的WLAN室内定位系统模型设计与实现[J].仪器仪表学报,2014,35(5):1169-1178.
LIU Mingxin,SUN Jianli. Design and implementation of WLAN indoor positioning system model based on energy efficiency[J]. Chinese Journal of Scientific Instrument, 2014,35(5):1169-1178. (in Chinese)
[4] 张维,李文涛,王力.基于接收信号强度的不同移动终端定位方法研究[J].西北工业大学学报,2014,32 (3):481-485.
ZHANG Wei,LI Wentao,WANG Li. Research on RSS(received signal strength) positioning method when mobile terminals are different[J]. Journal of Northwestern Polytechnical University,2014,32(3):481-485. (in Chinese)
[5] 谢代军,孔范增,胡捍英.终端异质下位置指纹的鲁棒性研究[J].计算机工程,2014,40(5):81-85.
XIE Daijun,KONG Fanzeng,HU Hanying. Research onrobustness of location fingerprint under terminal heterogeneity[J]. Computer Engineering,2014,40(5):81-85. (in Chinese)
[6] RATANA P,PANARAT C. A comparative study on indoor localization based on RSSI measurement in wireless sensor network[C] / / Proceedings of the 8th International Joint Conference on Computer Science and Software Engineering. Nakhon Pathom,Thailand:IEEE,2011:1-6.
[7] XIE L. A new indoor localization method based on inversion propagation model[C] / / Proceedings of the 6th International Conference on Wireless Communications Networking and Mobile Computing. Chengdu:IEEE,2010:1-4.
[8] 张兴. WLAN室内定位信号特征提取算法研究[D].哈尔滨:哈尔滨工业大学,2013.
ZHANG Xing. Signal feature extraction algorithm in WLAN indoor localization[D]. Harbin:Harbin Institute of Technology,2013. (in Chinese)
[9] CARLOS F,JOSE L,INMACULADA M. Time - space sampling and mobile device calibration for WIFI indoor location systems[J]. IEEE Transactions on Mobile Computing,2011,10(7):913-926.
[10] 李论,丁恩杰,郝丽娜,等.一种改进的煤矿井下指纹定位匹配算法[J].传感技术学报,2014,27(3):388-393.
LI Lun,DING Enjie,HAO Lina,et al. An improved location fingerprint localization matching algorithm in coal mine[ J]. Chinese Journal of Sensors and Actuators, 2014,27(3):388-393. (in Chinese)
[11] SUROSO D J, CHERNTANOMWONG P, SOORAKSA P,et al. Fingerprint-based technique for indoor localization in wireless sensor networks using fuzzy C-means clustering algorithm[J]. International Symposium on Intelligent Signal Processing and Communication system, 2011,2(2):1288-1294.
[12] JAIN V, TAPASWI S, SHUKLA A. RSS fingerprints based distributedsemi-supervised locally linear embedding location estimation system for indoorWLAN [J]. Wireless Personal Communications,2012(1):1-18.
[13] ZHOU M,XU Y,TANG L. Multilayer ANN indoor location system with area division in WLAN environment [J]. Systems Engineering and Electronics, 2010, 21 (5):914-926.
[14] 徐凤燕,李樑宾,王宗欣.一种新的基于区域划分的距离-损耗模型室内WLAN定位系统[J].电子与信息学报,2008,30(6):1405-1408.
XU Fengyan, LI Liangbin, WANG Zongxin. A new WLAN indoor localization system based on distance-loss model with area partition[J]. Journal of Electronics & Information Technology, 2008, 30 (6): 1405 - 1408. (in Chinese)
[15] 周牧,张巧,邱枫.基于物理邻近点辅助的无线局域网指纹定位方法[J].计算机应用,2014,34(6):1563-1566.
ZHOU Mu,ZHANG Qiao,QIU Feng. Fingerprinting location method for WLAN using physical neighbor points information[J]. Journal of Computer Applications,2014, 34(6):1563-1566. (in Chinese)

江春冬(1974—),女,吉林镇赉人,2013年于河北工业大学获工学博士学位,现为讲师,主要研究方向为信息检测与智能算法;
JIANG Chundong was born in Zhenlai,Jilin Province,in 1974. She received the Ph. D. degree from Hebei University of Technology in 2013. She is now a lecturer. Her research concerns information detection and intelligent algorithms.
Email:chundong_j@163. com
惠 慧(1991—),女,河北沧州人,硕士研究生,主要研究方向计算机控制与工程应用;
HUI Hui was born in Cangzhou,Hebei Province,in 1991. She is now a graduate student. Her research concerns computer control and engineering applications.
陈云飞(1979—),男,河北邢台人,讲师,博士研究生,主要研究方向为计算机检测技术;
CHEN Yunfei was born in Xingtai, Hebei Province, in 1979. He is now a lecturer and currently working toward the Ph. D. degree. His research concerns computer detection technology.
杜太行(1963—),男,天津人,教授、博士生导师,主要研究方向为电器检测和计算机应用。
DU Taihang was born in Tainjin,in 1963. He is now a professor and also the Ph. D. supervisor. His research concerns electrical testing and computer applications.
An Improved Online Position Fingerprint Algorithm for Strength-independent Interference Source Location
JIANG Chundong1,2,HUI Hui1,CHEN Yunfei1,DU Taihang1,2
(1. School of Control Science and Engineering,Hebei University of Technology,Tianjin 300130,China; 2. Control Engineering Research Center of Hebei,Tianjin 300130,China)
Abstract:The existing hotter indoor location fingerprint positioning system that fixes the transmitter and positions the receiver is applied to the indoor radio interference source location that fixes the receiver and positions the transmitter. And an online locating method considering interference source signal strength is studied in order to overcome the problem that using directly the established fingerprint database with constant emission intensity and existing online positioning methods couldn't position when interference sources are from different emission intensities. According to the analysis of signal propagation model and the existing online positioning method,the presented method uses the variance of intensity differences to perform positioning calculation. The algorithm basis and procedures are given,and the improved algorithm's practicability is verified by simulation and experiment. At the same time,the idea of the improved algorithm also has a certain guiding significance to fingerprint positioning systems considering the receiver heterogeneity position.
Key words:location fingerprint position;interference source intensity;online position method
doi:10. 3969/ j. issn. 1001-893x. 2016. 02. 004引用格式:钟德安,茅永兴,刘扬,等.船载雷达光轴晃动对修正参数标定的影响[J].电讯技术,2016,56(2):135-139. [ZHONG Dean,MAO Yongxing,LIU Yang,et al. Influence of ship-borne radar optical axis jitters on calibration of correction parameters[J]. Telecommunication Engineering,2016,56(2):135-139. ]
作者简介:
中图分类号:TN966. 3
文献标志码:A
文章编号:1001-893X(2016)02-0128-07
基金项目:工业和信息化部课题(12-MC-KY-14)
*收稿日期:2015-07-13;修回日期:2015-09-22 Received date:2015-07-13;Revised date:2015-09-22