基于PID算法的DC-DC电源负载调整率改进研究
2016-04-05李培正陈志威
李培正,张 胜,陈志威
(南京邮电大学光电工程学院,江苏南京210046)
基于PID算法的DC-DC电源负载调整率改进研究
李培正,张 胜,陈志威
(南京邮电大学光电工程学院,江苏南京210046)
负载调整率是直流电源的一个重要参数,负载调整率的高低决定了整个系统的性能。研究了LM2577升压芯片的内部结构及性能参数,在此基础上,提出了两种提高其负载调整率的新方法:(1)在LM2577反馈脚接入可程控数字电位器,代替原固定电阻,用AD采样输出电压的变化,通过反馈算法调节数字电位器的阻值,保持输出电压稳定,进而提高其负载调整率;(2)在LM2577反馈脚接入加法器,加法器的输入端分别由输出电压分压端和受单片机控制的DA提供,单片机通过采样输出电压来调整DA的输出,进而实现输出电压的稳定,提高负载调整率。为了缩短调整时间,提高控制效率,软件部分采用了PID控制算法。经测试,在5 V输入、600 mA负载条件下,设定输出为7 V,方法1和方法2升压电路的负载调整率从1.043%分别提升到0.700%及0.042%;而设定输出为12 V时,负载调整率从0.658%均提升到0.008%。同时,方法2的输出电压纹波在10 mV以内。
升压;反馈;PID;负载调整率
近年来DC-DC电源在日常生活和电子设备中得到了广泛应用,其主要功能是将前级电源的直流电通过一定的电压变化后提供给后级使用。随着应用的不断深入,人们对电源的参数要求也越来越高。电源的最重要参数是输出电压的稳定性,反映输出电压稳定性的主要参数为电压调整率和负载调整率。无论是分立元件电源,还是集成芯片电源,都在努力提高其输出电压的稳定性[1],但由于DC-DC电源不是理想的电压源,受加载效应的影响,输出电压或多或少会随着负载的增大而降低。随着开关电源芯片设计和生产工艺的提高,其负载调整率虽有改善,但总体来看还是不尽如人意。本文以市面上常见的LM2577升压芯片为例[2],深入研究了其内部结构及性能指标,按照数据手册上给出的推荐参数进行电路设计和测试,测量了其在输入电压为5 V、负载电流600 mA、输出电压分别为7和12 V时的负载调整率,其负载调整率大于0.658% (见表1),输出电压的稳定性不太理想。为了得到稳定的电压输出,一些研究人员在集成电路级对电源结构进行改良[3],也有从板级电路研究使用模拟控制使电路稳定工作的方法[4]。但由于造价跟电路结构的问题,一直未能大规模应用。本文提出了两种提高其负载调整率的新方法:(1)在LM2577反馈脚接入可程控数字电位器,代替原固定电阻,用AD采样输出电压的变化,通过反馈算法调节数字电位器的阻值,保持输出电压稳定,进而提高其负载调整率;(2)在LM2577反馈脚接入加法器,加法器的输入端分别由输出电压分压端和受单片机控制的DA提供。单片机通过采样输出电压,来调整DA的输出,进而实现输出电压的稳定,提高负载调整率,取得了较好的效果。
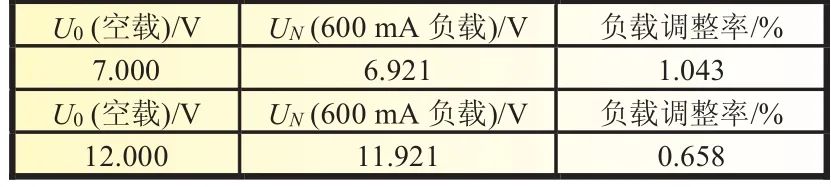
表1 5 V输入电压和不同输出电压的负载调整率
1 提高LM2577负载调整率的方法
1.1 LM2577电路原理及负载调整率测试方法与结果
图1为商家数据手册提供的LM2577的参考电路图。

图1 LM2577参考电路
由其数据手册给出输出电压计算公式:

该电路的负载调整率测试方法为:当输出电流为0时,测得输出电压为,设定输出电流600 mA,测得输出电压为,则电压调整率计算公式为:

按照数据手册给出的参考电路,进行电路设计与制作,测量5 V输入条件下,7与12 V输出时的负载调整率(负载电流最大600 mA),测量结果如表1所示。
1.2 方法1(基于数字电位器反馈电路的提高负载调整率方法)
LM2577电路输出电压不稳定,负载调整率低的主要原因是反馈电路不能智能调整,当R1、R2设定后就保持不变。因为本文首先想到的思路是,R1改用阻值可以程控的数字电位器,在输出电压随负载变化时,通过调整数字电位器的阻值,来保持输出电压的稳定,进而提高其负载调整率。其电路原理如图2所示。电路采用10位数字电位器(AD5293)作为反馈调整电阻,同时单片机通过ADS1115采样检测输出电压,并通过计算确定数字电位器阻值的变化情况,以稳定输出电压。

图2 方法1系统电路
1.3 方法2(基于DA反馈电路的提高负载调整率方法)
根据LM2577工作原理,其控制引脚2的电压值为固定1.23 V,理论上来说,输出电压的大小完全由分压电阻R1、R2分压比决定,和负载大小无关,也即负载调整率为0,但实际应用时,由于LM2577内部运放的放大倍数不是无穷大、芯片内部器件及外围分压电阻的不稳定等影响,导致输出电压不稳定,进而导致电压调整率变大。本文提出在LM2577反馈控制引脚2上叠加一个可程控的电压信号(),这样就可以通过改变这个电压的大小,实现改变LM2577输出电压大小的功能。实际电路中,采样输出电压的大小,反馈给微处理器,然后通过DA调整控制电压,进而实现输出电压的稳定,提高电路的电压调整率。
按照LM2577手册给出的电路连接电路,并保持自身反馈回路不变,在其反馈脚用同向加法器加入受单片机控制DA的电压,实现输出电压的数字控制,为了精确控制输出电压,在数字反馈回路中选用12位AD(ADS1115)与12位DA (TLV5638),总体电路如图3所示。

图3 方法2系统电路
为了设定输出电压时,单片机能够更快速地设定DA初值,本文测量了DA输出电压与电源输出电压之间的对应关系,并进行了两者关系拟合,如图4所示。
拟合后,数学表达式为:

1.4 PID算法及其在本文中的应用
在过程控制中,按偏差的比例(P)、积分(I)和微分(D)进行控制的PID算法是应用广泛的一种控制算法[5],PID算法的一般算式及模拟控制规律表达式为:
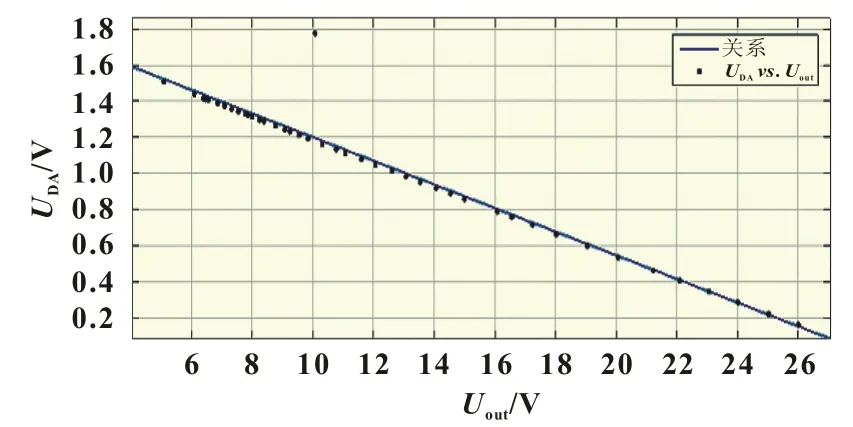
图4 DA电压与输出电压的关系

因为单片机是通过软件实现其控制算法,不能对积分和微分项直接准确计算,它只能根据采样时刻的偏差值计算控制量,故必须对模拟调节器进行离散化处理,用离散的差分方程来代替连续的微分方程,其基本思想是当采样时间很短时,可用一阶差分代替一阶微分,用累加代替积分。即:

由此可得离散PID算法表达式如下:


两式相减,得:

当用户设定一个输出电压时,算法根据事先拟合出来的关系曲线,先大致确定一个与设定电压对应的数字电位器或DA的输出量,以使输出迅速向设定电压靠近,这类似于粗调;粗调完成后,再根据采样得到的误差值基于PID算法对数字电位器或DA的输出量进行调整,实现输出电压的稳定。
2 实验数据
2.1 负载调整率测量
按照上述设计进行实物制作,在5 V输入电压下,利用本文1.1节中的测试方法,基于方法1的负载调整率如表2所示。
同样,基于方法2的负载调整率如表3所示。

表2 利用方法1时不同输出电压的负载调整率
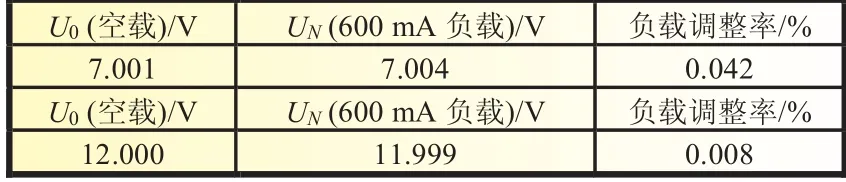
表3 利用方法2时不同输出电压的负载调整率
2.2 不同输出电压时不同系统带载电压变化情况测试
在输入电压为5 V时,针对输出电压为7和12 V两种情况,分别测量数据手册参考电路、方法1(基于数字电位器反馈系统)、方法2(基于DA反馈系统)这三种不同系统的带载电压变化情况,如图5、图6所示。图中最上方虚点线表示方法1(基于数字电位计反馈系统)在负载不断增大的过程中,升压电路输出电压的变化情况;中间黑实线表示方法2(基于DA反馈系统)在调节负载的过程中,输出电压的变化情况;最下方点划线表示按照数据手册参考电路连接电路时,在负载变化过程中,输出电压的变化情况。
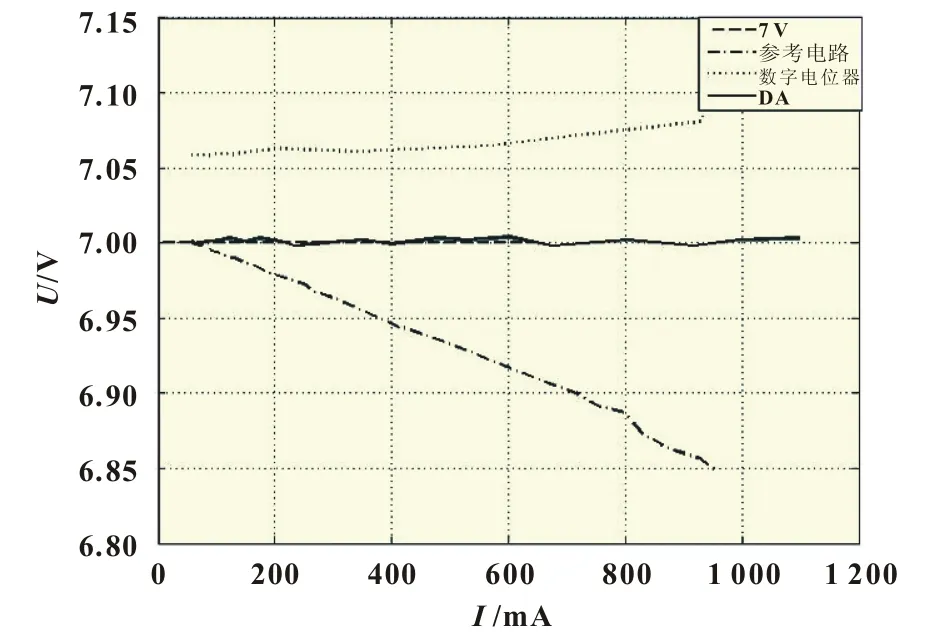
图5 输出电压为7 V时不同电路输出电压带载变化情况
可以看出,在同样的测试条件下,对数据手册上所给出的参考电路,当负载增大时,输出电压明显减小,而基于数字电位器反馈的系统与基于DA反馈的系统都起到了稳定输出电压的作用。由于受数字电位器精度的限制,相较于方法1,利用方法2当负载变化时,输出电压更加稳定。
3 结论
本文提出了两种提高电源输出电压稳定性、改善负载调整率的方法,对两种方法进行数据测试,当设定输出为7 V时,方法1和方法2升压电路的负载调整率从1.043%分别提升到0.700%及0.042%;而设定输出为12 V时,负载调整率从0.658%均提升到0.008%,从而证明了这两种方法的合理性,对开关电源负载调整率的提升具有参考意义。

图6 输出电压为12 V时不同电路输出电压带载变化情况
[1]王其岗,荣焱.开关电源稳定性设计[J].电源技术应用,2008(6):1-5.
[2]蒋玉萍.简易型多功能开关变换控制器LM2577在开关电源中的应用[J].电源世界,2007(7):48-51.
[3]徐祥柱,王易,陈程,等.一种DC/DC斜坡补偿电路的设计[J].中国集成电路,2011(7):31-36.
[4]艾国昌.数字控制型双向DC/DC变换器的研究[D].葫芦岛:辽宁工程技术大学,2009.
[5]徐锋,张嫣华.数字控制系统的PID算法研究[J].机床电器,2008 (6):8-10.
Improvement of load regulation of DC-DC power supply based on PID algorithm
As one of the most important parameters of direct current(DC)power supply,load regulation determines the performance of whole system.The internal structure as well as performance parameters of LM2577 boost converter was investigated and two new methods of improving its load regulation were proposed based on this investigation.One method(method 1)was to replace the resistor by connecting a programmable potentiometer to the feedback pin of LM2577 and sample the variation of output voltage using an AD converter.The potentiometer was adjusted under the control of feedback algorithm to keep the output voltage stable, thus the load regulation was enhanced.In the other method(method 2),an adder was connected to the feedback pin of LM2577 to stabilize the output voltage of DC power supply and increase the load regulation.A voltage divider made up of resistors divided the output voltage and provided the divided voltage to one input of the adder.The other adder input came from DA converter controlled by microcontroller.To reduce the adjust time and increase the efficiency,PID algorithm was applied in the software part of the system.12-bit AD(ADS1115),12-bit DA(TLV 5638)and 10-bit programmable potentiometer(AD5293)were used to test the methods above under the condition of 5 V input voltage and 600 mA load current.When output is set to 7 V,the load regulation is improved from 1.043%to 0.700%and 0.042%by applying the first and second method,respectively.When output voltage equals 12 V,the improvement is from 0.658%to 0.008%.Meanwhile,the method 2 suppresses output voltage ripple to be less than 10 mV.
boost;feedback;PID;load regulation
TM 547
A
1002-087 X(2016)06-1286-04

2015-12-12
国家自然科学基金(31272511)
李培正(1992—),男,江苏省人,学士,主要研究方向为信号检测与信息处理。
张胜
