深海技术装备研制现状与展望*
2016-03-27唐元贵刘铁军栾振东王永杰中国科学院沈阳自动化研究所沈阳006中国科学院海洋研究所青岛6607中国科学院半导体研究所北京0008
李 硕 唐元贵** 黄 琰 刘铁军 刘 健 李 彬 张 鑫 栾振东 王永杰 中国科学院沈阳自动化研究所 沈阳 006 中国科学院海洋研究所 青岛 6607 中国科学院半导体研究所 北京 0008
深海技术装备研制现状与展望*
李 硕1唐元贵1**黄 琰1刘铁军1刘 健1李 彬1张 鑫2栾振东2王永杰3
1 中国科学院沈阳自动化研究所 沈阳 110016
2 中国科学院海洋研究所 青岛 266071
3 中国科学院半导体研究所 北京 100083
历经近半个世纪的努力,我国海洋技术与装备取得了长足的进步和发展,尤其是近年来,深海技术与装备的发展为我国海洋科学的创新提供了新的动力。中科院战略性先导科技专项“热带西太平洋海洋系统物质能量交换及其影响”以科学需求为导向,追踪国际前沿,立足我国深海技术装备发展现状,提出研制科学应用目标明确的深海探测与作业装备,形成具备利用自主式观测系统、连续观测与作业系统以及新型海洋传感器及采样设备开展综合性海洋探测与作业的能力。专项执行 4 年的时间,深海技术装备面向专项科学目标,形成了具有完全自主知识产权的技术装备,形成了一批有影响的成果,为海洋科学研究提供了先进的技术手段,推动了我国深海探测与作业技术的发展,在我国深海技术装备发展中发挥了重要的先导作用。
深海技术装备,自主式观测,连续观测与作业,新型海洋观测传感器与采样系统
DOI 10.16418/j.issn.1000-3045.2016.12.005
海洋科学是海洋技术发展的源泉,海洋技术是海洋科学创新的动力。历史上,海洋学的创新和海洋资源的新发现都是源自海洋调查观测的结果,可见海洋科学的创新研究与海洋观测和探测技术密不可分[1]。在中科院“热带西太平洋海洋系统物质能量交换及其影响”战略性先导科技专项中,面向热带西太平洋海气相互作用、黑潮对中国近海的影响等一系列海洋科学问题,设立了“深海探测设备研发与应用”项目,其研究目标是,追踪国际前沿,自主研发了系列化的具有国际先进水平和能力的海洋技术和装备,为专项提供海洋科学研究所需的自主式观测系统、连续观测与作业系统、新型传感器以及探测和取样设备等,为解决和科学分析海洋科学问题及海洋现象提供了技术手段,形成自主知识产权的装备,推动我国深海探测与作业技术的发展[2]。
1 项目研究内容
面向专项的科学需求,项目主要开展了三类海洋技术装备的研制与应用工作。
1.1 自主式观测系统
自主式观测系统通过母船布放后,脱离母船工作,主要使用相对长期、连续的海洋自主移动观测平台,来满足海洋科学调查对高时空分辨率现场观测数据或敏感区域自主观测的实际需求。其主要包括 300 m/1 000 m 水下滑翔自主观测系统、1 000 m 级长期定点剖面观测型自主水下机器人(AUV)以及 4 500 m 级深海热液探测 AUV 等系统。
水下滑翔机是一种将浮标、潜标技术与水下机器人技术相结合的新型海洋环境水下观测平台[3]。其通过调整自身浮力提供驱动力,并依靠水平翼的升力将垂直运动转换为水平运动,同时通过内置姿态控制装置和航向控制装置控制其姿态角和航向角,实现连续可控的滑翔运动,来满足专项对高时空分辨率现场观测数据或敏感区域自主观测的需求。水下滑翔自主观测系统就是利用多台水下滑翔机协同完成自主观测任务。
长期定点剖面观测型 AUV 是一种新型自航式和垂直剖面运动相结合的自主连续观测系统,通过高精度的双向浮力调节技术,实现最优水平航行和垂直剖面运动,搭载相关的传感器,可以获得超过 30 天的海流、溶解氧、浊度、叶绿素、温盐深等海洋要素的长期剖面数据信息,来满足黑潮流经的敏感海域的长期、定点、连续观测的需求[4]。
深海热液探测 AUV 系统是一套集成微地形地貌测量、海底照相、热液异常探测等传感器的 4 500 m 级 AUV系统,可以在复杂近海底环境自主航行,可以满足深海热液活动区和冷泉区域精细声学探测和近底光学观测的需求。
1.2 海洋连续观测与作业系统
海洋连续观测与作业系统主要是依托母船开展工作,主要解决海洋物质、能量、热量等的输运过程研究急需的连续观测系统,促进西太平洋及中国近海海洋环流动力学的研究。主要包括:500 m 船载拖曳式光纤温深剖面连续观测系统、3 000 m 深海生态过程长期定点观测系统和 6 000 m 级深海科考型遥控水下机器人(ROV)系统等。
船载拖曳式光纤温深剖面连续测量系统是一种高密度、高效率船载拖曳式测量装备,充分发挥系统在时间上和空间上的连续测量的优势,为海洋调查和科学研究提供了全新的观测技术手段,以快速高效获取高时空密度温深数据[5]。
深海生态过程长期定点观测系统是一种框架式水下固定观测平台,可根据科学需求选择搭载不同的传感器,可长期在海底进行连续定点观测,并且可以通过ROV 来调整观测的具体位置,可以获得超过一年的多传感器同步定点精确观测数据,来研究深海生态系统的形成与演变机制,生物生长周期和代谢节律,种群随季节变化等海洋现象。
深海科考型 ROV 系统将是我国首台自主研发面向科考应用的 6 000 m 级 ROV 装备,采用全电动推进技术,降低平台噪声,减少对环境的影响;采用光纤通信技术实时传输视频及数据,使用先进照明摄像设备,能够进行水下广播级高清视频拍摄;配有高精度导航和定位系统,实现水下多自由度高精度控制;具有丰富设备接口,可搭载多种科考仪器设备,安装两台灵巧机械手,可进行近海底采样作业。
1.3 新型海洋观测系列传感器与采样系统
新型海洋观测系列传感器与采样系统依托于母船或水下平台开展工作,通过开展深海生物、生态环境探测技术及传感器、深海热液探测技术及传感器的研制,解决深海环境尚缺少有效的传感器和系统探测技术问题,提高对该区域深海观测、探测能力,促进深海生物地球化学循环科学研究的发展。主要包括:基于深海 ROV 平台的 4 500 m 级拉曼光谱原位定量探测系统、3 000 m/6 000 m 深水可视化可控轻型沉积物柱状取样系统、3 000 m 高通量深海海水采样及分级过滤系统和 4 500 m 级深海极端环境高精度温度链等。
基于深海 ROV 平台的拉曼光谱原位定量探测系统采用的拉曼光谱具有非接触、无损并且可多组分同时探测的优点,基于拉曼光谱技术研发的 RiP 系统尤其适用于深海热液喷口、海底冷泉等极端环境下的原位物质成分探测与分析[6,7]。
深水可视化可控轻型沉积物柱状取样系统结合往复式气动夯击关键技术,采用立式采样系统收放操作,并增加了实时控制与监测和水下定位等功能的适用于深水的综合性柱状沉积物采集。
高通量深海海水采样及分级过滤系统采用原位过滤获取样本的深海取样方法,为研究深海悬浮颗粒物研究提供一种简约有效的取样技术手段,改变了传统使用采水器采水,提升到船上实验室进行过滤后取得样本的工作模式[9]。
深海极端环境高精度温度链,在深海极端环境下对热液口温度和冷泉区温度进行精确的梯度测量,研究深海热量输运过程。
2 项目进展
经过 4 年的研制工作,3 种类型的深海技术装备经过设计、加工、制造、调试以及湖海试验等研制阶段,全面达到了主要技术指标要求。紧密围绕科学问题,部分技术装备已经在海上试验和航次应用中发挥了重要作用,取得了显著的科研成果。
2.1 初步构建我国面向海洋科学研究的自主式观测系统技术体系
研制面向海洋科学研究的系列自主式观测系统,构建我国面向海洋科学研究的自主式观测系统技术体系,形成了1 000 m 以浅海洋环境长期连续观测能力和 4 500 m以浅近海底精细探测能力。其中,海洋环境连续观测时间超过了 1 个月,航程超过了1 000 km,为长期、大范围海洋观测奠定了技术基础,并在国内率先利用大深度AUV 在近海底进行声光精细探测开展冷泉研究工作。
2.1.1 水下滑翔自主观测系统
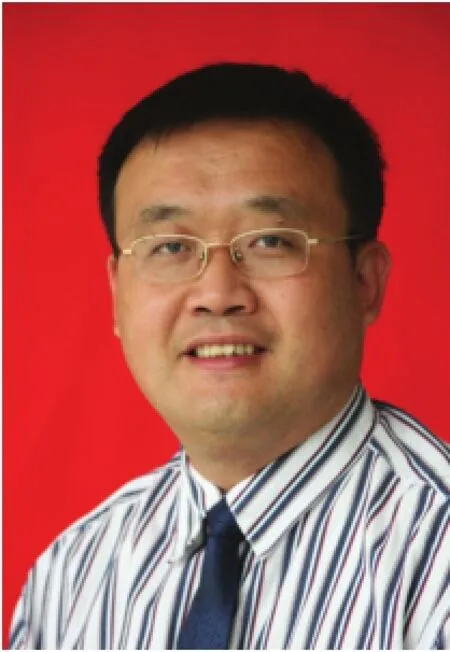
中科院沈阳自动化所主持研制的“海翼”300 m和 1 000 m 两个系列水下滑翔机,在研制过程中,结合科学目标进行了一系列海试研究,提高了水下滑翔机技术成熟度,引领我国水下滑翔机率先迈入了实际观测应用阶段。水下滑翔机在水面的通信工作状态及中尺度涡观测路径如图 1 所示。
2014 年 10 月,“海翼”水下滑翔机在南海结束了为期一个多月的海上试验。在长航程试验中,水下滑翔机在 55 km×55 km 区域内连续航行,航程突破 1 000 km,达到 1 022.5 km,获得 229 个 1 000 m 深剖面观测数据,这是我国水下滑翔机首次持续观测航程超过1 000 km,持续观测时间达到 30 天。实验数据处理发现,在本次试验区域发生了两次海洋上层水体混合层变冷的现象,而水下滑翔机的高精度数据为定量分析混合层冷却的原因提供了强有力的支持。
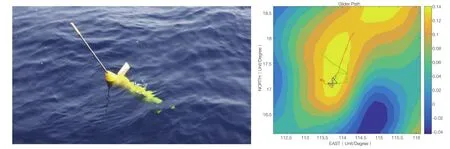
图1 水下滑翔机在水面的通信状态及中尺度涡观测路径
2016 年 7 月,3 台水下滑翔机在南海西于南海西沙群岛以东海域开展了中尺度涡观测实验。结合遥感卫星数据和漂流浮标数据,分别采用不同的观测策略对西沙群岛以东的一个直径为 100 km 的中尺度进行为期 15 天的连续观测。在我国首次使用 3 台水下滑翔机对海上动态目标的多参数持续观测,3 台水下滑翔机累计航程达 1 033 km,成功完成 316 个 1 000 m 级下潜剖面,成功验证了与卫星遥感数据结合对动态目标进行跟踪的在线控制策略,为水下滑翔机组网观测应用奠定了技术基础。
2.1.2 长期定点剖面观测型AUV系统
长期定点剖面观测型 AUV 系统(以下简称“探索 1000”)是由沈阳自动化所根据专项提出的科学问题而研制的全新技术装备,充分结合自主水下机器人和水下滑翔机的技术,突破了高精度、双向大深度浮力调节和长航时多模态控制等关键技术。“探索 1000”具有自主航行、无动力潜浮及监管休眠等工作状态,在国内尚属首创,达到了国际先进水平。“探索 1000”AUV 如图 2 所示。

图2 “探索1000 AUV”及其观测数据
2015 年 10月,“探索 1000”在大连獐子岛海域顺利完成为期 25 天的海上试验,进行 11 次水下航行试验,累计运行超过 100 h,累计航程超过 400 km。其中单次任务使命最大连续工作时间为 94 h,最大航程为 364 km,连续观测剖面 25 次,获取了獐子岛海域 30 h 海流、温盐深、叶绿素和溶解氧等连续剖面观测数据,验证了该区域半日潮现象。
2016 年 6 月初,“探索 1000”在南海圆满完成为期 20 天的大深度海上试验。验证了其海上布放与回收操作的实用性及顺利完成了 5 级以上海况的安全回收工作,验证了系统自主航行和潜浮功能在深海工作的可靠性,最大潜浮剖面达到 700 m。在综合试验中,“探索 1000”在水下连续工作 7 天,航程超过 500 km,连续完成 43 个潜浮剖面观测,最大工作水深超过 800 m,达到了国际先进水平。
2.1.3 深海热液探测 AUV 系统
深海热液探测 AUV 系统(以下简称“探索 4500”)由沈阳自动化所和海洋所联合研制,是一套集成微地形地貌测量、海底照相、热液异常探测等传感器的 4 500 m 级 AUV 系统(图 3)。在研制过程中,在国内率先突破了融合超短基线定位信息的组合导航技术,开发了具有自主知识产权的组合导航和数据处理软件,提高了工作效率和大范围探测能力。突破基于前视声呐信息的自主避碰技术,提高其适应复杂环境的能力,保证近海底航行的安全。
试验中系统以超短定位为定位标准,自研导航和 PHINS 导航的东向误差和北向误差随时间变化的误差曲线图。观察 PHINS 的东向误差和北向误差是依赖时间的变化曲线,PHINS 的位置东向误差最大值为 50 m,北向误差最大值为 70 m;自研导航的位置东向误差和北向误差均在 20 m 以内,与超短基线定位精度基本相当。高精度的导航和定位数据为近海底探测提供了有力的技术支撑。
2016 年 7 月22日,“探索 4500”顺利完成历时 16 天海试和冷泉区试验性应用,连续下潜 8 次,在我国深海AUV上首次成功使用超短基线定位模式进行探测作业,获取了大面积冷泉区精细地形地貌图和数千张海底高清影像照片。这是我国深海 AUV 首次对冷泉区进行精细地形地貌底质探测、近底拍照和理化环境多参数探测,获得大量科考数据。

图3 深海热液探测 AUV 系统及其拍摄海底照片
2.2 初步构建我国最先进的海洋连续观测与作业系统
研制船载大范围连续观测、海底定点长期观测以及大深度作业系统,形成海洋连续观测和大深度作业能力,构建了我国最先进的海洋连续观测与作业系统,开展海上试验和航次应用。
2.2.1 船载拖曳式光纤温深剖面连续测量系统
船载拖曳式光纤温深剖面连续测量系统由中科院半导体所研制,突破了任意长度接续和叠加成链、低损耗抗挤压熔接点保护等关键技术[8],成功研制了50 m 和 200 m 长度的温深测量系统,从传感器设计与封装、解调仪长期稳定性、绞车系统设计与集成调试等方面完成了一系列的技术攻关,并完成了相应的海试,正在制备 500 m 的拖曳链系统。
2016 年 7 月,在北黄海进行了拖曳海试工作,试验中,绞车实物图及导向滑轮如图 4 所示。
黄海夏季为黄海冷水团鼎盛时期,冷水团分布范围广,黄海冷水团分布呈品字形分布。其北黄海冷水团核心位于 38.5°N 左右。从试验数据中可以观测到温跃层处等值线呈倾斜状态,即南部温跃层位置较北部温跃层位置偏浅,且南部温跃层等值线较北部密集,底部存在一个 8°C 的闭合冷水核心区。
温度链拖曳所获得的海试数据对冷水团能有非常高精度和高空间分辨率的观测,对传统海洋学的调查有重要的支撑作用,不仅丰富现有的调查手段,同时对科学家分析海洋现象提供高质量的数据,更进一步促进海洋调查和海洋学研究的发展。
2.2.2 深海生态过程长期定点观测系统

图4 绞车、导向滑轮实物图及海试状态示意图
深海生态过程长期定点观测系统(以下简称着陆器)由中科院沈阳自动化所研制(图 5)。2016 年 4 月,在南海完成 3 000 m 级海上试验后,于 2016 年 6 月搭载“科学”号考察船在南海冷泉区开展了为期16天的水下连续观测。在 ROV 协助下,对着陆器观测点位置进行了精确调整,获得了冷泉区生物的高清照片和海底物理、化学等环境参数的大量观测数据,为科学家研究南海冷泉生物群落及其所处环境的变化特征是否存在潮汐周期相关性等科学问题提供了有力的数据支撑。

图5 深海生态过程长期定点观测系统及其科考应用
通过试验性科学应用,获得了南海冷泉生物群落密集区的理化环境参数的原位数据,与普遍认为的深海环境处于低氧条件不同,着陆器的观测结果表明该区域 DO(溶解氧)饱和度接近 50%,对于多数贝类底栖生物,并不形成胁迫。根据 ADCP(声学多普勒流速剖面仪)的分析结果,该冷泉区域底层流非常强劲,黑潮底层的海水可能经该海流输运到冷泉区,并及时补充底层生物的 DO 消耗。甲烷浓度表现出明显的日变化,潮汐可能是造成该变化的主要原因。甲烷浓度变化会对生物行为产生显著影响,在高甲烷(CH4)浓度的时间中,深海贝Bathymodiolus 的开壳换水频率有所增加,同时潜铠虾也表现出跟随 CH4高值区迁移的特性。本次结果显示,甲烷浓度是影响深海生物行为的主要因素之一,深海底层流和潮汐也将为深海生物提供良好的生境并影响种群的输送。
2.3 研发国际和国内技术领先的新型海洋观测传感器和采样系统
研制新型传感器、探测和取样设备,形成大深度、高精度原位精细探测与采样能力,部分成果达到国际领先水平。
2.3.1 基于深海 ROV 平台的拉曼光谱原位定量探测系统
拉曼光谱原位定量探测系统(RiP 系统)由中科院海洋所研制,依托深海 ROV 平台开展近海底原位探测,在突破激光拉曼光谱仪及探针等关键器件技术攻关后,进行了系统轻型化改造和双控制系统的升级,现已顺利完成专项“科学”号 2015 年度、2016 年度冷泉-热液综合航次的科考任务,分别对马努斯热液区、冲绳海槽热液区及我国南海北部冷泉区等几个靶定区域进行了原位拉曼光谱探测,并开展了一系列的科学应用试验。
在我国南海首次发现裸露于海底的天然气水合物。在冷泉溢流口附近生物群落下发现了表层天然气水合物,并通过 RiP 系统获得了天然气水合物样品的深海原位拉曼光谱,拉曼光谱数据表明其为标准的 I 型水合物。
为了研究冷泉溢流口附近环境对天然气水合物生成和分解过程的影响,在我国南海冷泉考察期间,利用 RiP系统对冷泉溢流口附近的溢流气体原位快速生成水合物的过程进行了原位拉曼光谱探测(图 6)。
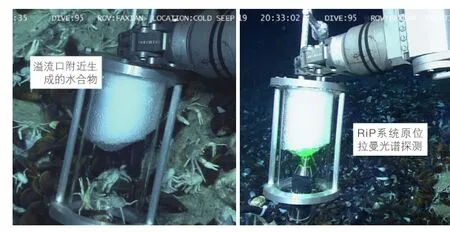
图6 冷泉附近溢流气体快速生成天然气水合物及拉曼光谱原位探测
在冷泉溢流口附近生物群落下覆水中首次发现溶解或者悬浮态的自然硫(S8)且其与硫酸根(SO42-)及CH4浓度和深度有一定的关联性。通过 2016 年度 2 个航次的重复实验,验证了这一关联性,由此可以将AOM(anaerobic oxidation of methane)过程从沉积物层扩展到生物群落下覆水层,且可以大胆假设存在将硫化氢进一步氧化成自然硫的微生物参与的新氧化反应,这在国际上尚属首次。
对热液区不同温度的热液喷口溢流体及热液喷口附近的特殊系统进行了原位拉曼光谱探测。在 2015 年度的冷泉-热液综合航次考察期间,RiP 系统对马努斯热液区的黑烟囱、白烟囱进行了原位拉曼光谱探测,获得黑烟囱喷口附近流体(280oC)中的化学成分的典型拉曼光谱。2016 年度航次期间,利用 RiP 系统对冲绳海槽热液喷口附近的液态 CO2pool 进行了原位拉曼光谱探测。
目前的研究成果可以为深海热液喷口、海底冷泉等极端区域的海洋化学分析提供一种新思路和方法,为研究冷泉热液的形成机制、物质能量交换过程等科学问题提供有力的数据支持。
2.3.2 深水可视化可控轻型沉积物柱状取样系统
深水可视化可控轻型沉积物柱状取样系统(以下简称:取样系统)由中科院海洋所研制,在对 3 500 m 取样系统进行工程化改造的同时,研制了 6 000 m 取样系统。
2014 年 3 500 m 取样系统在海试中,在冷泉与热液区共取得约 12.5 m 沉积物柱状样品,其中最长样品长度约为 285 cm。2015 年专项航次中,进一步完善的 3 500 m 取样系统在南海冷泉与马努斯热液 2 个工区内共取得沉积物柱样约 52.5 m,最长样品长度为 10.9 m,取样率最高可达 90.8%。对沉积物样品进行 10 cm 分层沉积物孔隙水进行提取,获得 510 个分层孔隙水样品。在国内首次获得马努斯热液区沉积物柱状样品。3 500 m 取样系统海上试验及取得的样品如图 7 所示。
2016 年专项航次中,对 6 000 m 取样系统进行了海试并应用于取样和调查工作,共取得样品约 50m,最长样品长度约为 6.4 m,取样率最高可达 80%,对沉积物样品进行现场 10 cm 分层的沉积物孔隙水提取,获得 300个分层孔隙水。
以孔隙水研究为例:南海冷泉流体中富含 CH4,这些流体在自身浮力作用下沿优势通道向海底运移的过程中,在甲烷厌氧氧化菌和硫酸盐还原菌的作用下能够有效地改变孔隙水中硫酸根、钙离子等组分的含量。该冷泉地区水合物广泛发育,如果这些富甲烷流体来源于天然气水合物的分解,其释放出的大量水分则会降低氯离子、钠离子等保守离子的含量,水分子 δ18O 值也会有所指示。因此,孔隙水中特征离子的含量是研究海底流体活动的重要指标。
3 500 m 和 6 500 m 取样系统都成功地进行了海试与应用,获得了大量宝贵样品,有利地保障了专项在各研究海区沉积物地球化学特征和沉积环境演化等方面的研究工作。
2.4 小结
为满足专项的科学需求,项目的深海海洋探测设备在经历研制、试验和应用后,取得了一定的研究成果,为专项的科学研究提供了先进、实用、可靠的技术手段。在 2017 年度,将围绕科学目标构建异构海洋探测设备应用系统,综合利用项目研制的水面、水下和海底等不同类型的装备,开展不同深度和不同尺度的多系统协同立体观测和作业,为科学研究提供有价值的多参数协同观测数据。
3 发展展望
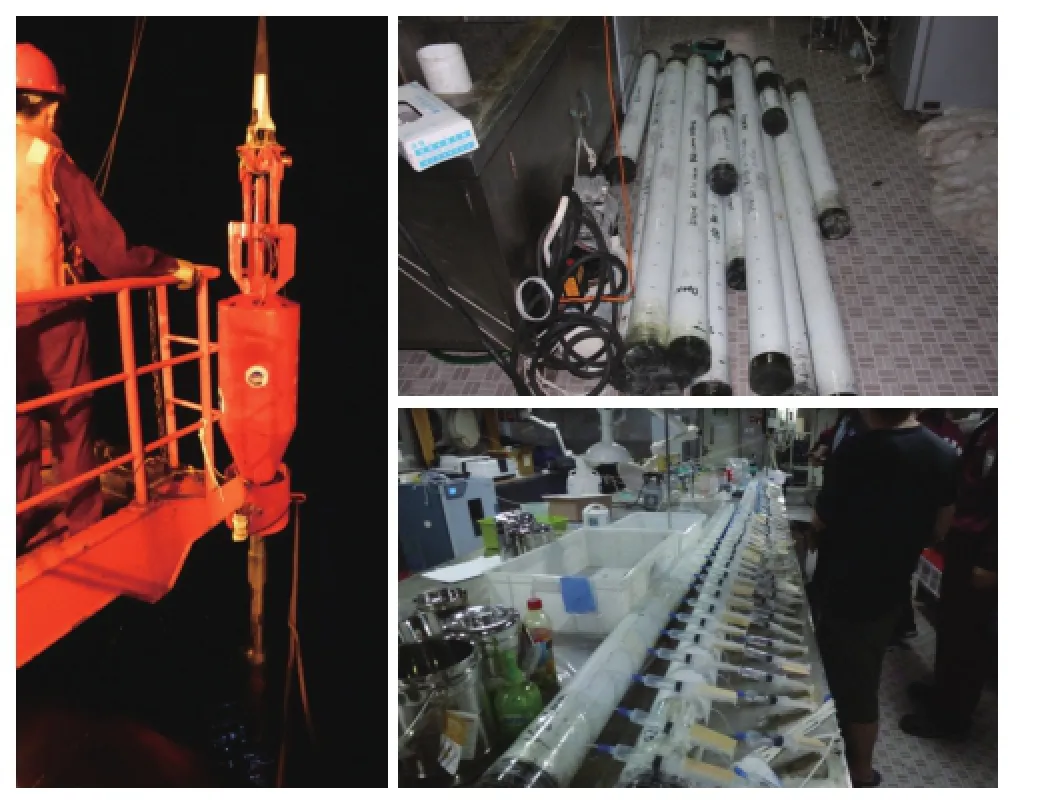
图7 3500 m级取样系统海上试验及取得的样品
人类对海洋的认识是一个长期漫长的过程,这需要研制工作时间更长、航程更远、深度更深、作业能力更强、更智能的海洋技术装备,在认识海洋的基础上,逐步实现利用海洋和开发海洋的目标。随着技术的革新和进步,以及深海技术装备向着实用性、可靠性和智能化方向的发展,我国深海技术及其装备在海洋科考及服务国民经济等方面将发挥重要的作用。
(1)在由单一装备向多元、集群装备发展方面,将立足单体技术,拓展群体式的海洋技术装备在全球海域范围内实现自主协同探测与自主作业,构建基于海洋科学研究目标的多海洋探测设备集成与演示系统,形成具有长期、协作、多系统、低成本、全立体式的海洋信息综合探测与作业能力。利用项目研发的、已经过海试的技术装备,结合科学目标,进行多类型、多台套、多用途的海洋设备集成演示,并开展示范应用。利用多种不同类型的装备,开展不同深度和不同尺度的立体观测,为科学研究提供有价值的多参数协同观测数据,为专项与国家相关专项的有机衔接,奠定坚实的技术基础。
(2)在人类从事海洋活动的类型转换方面,加强对具有作业能力的深海装备的研发和攻关,实现人类海洋活动从信息型到作业型的转变。丰富并提高海洋装备的探测和作业能力,实现由自主观测到自主探测以及最终自主作业的目标。实现从信息型到作业型的转变将是深海技术装备重要的发展趋势之一。人类对海洋的认识是一个漫长的时代,通过努力,研制具有更高智能和更强作业能力的海洋装备,在认识海洋的基础上,逐步实现利用海洋和开发海洋的目标,实现由观测到探测,最终实现作业的目标。
(3)在进一步提升我国海洋装备的实用性、可靠性和智能水平方面,将立足专项目标,拓展实现海洋科学问题解决的新方案,开创海洋探测与研究的无人时代。
随着海洋技术装备的发展将全面进入无人化时代,具有大范围探测和精细作业能力的智能化海洋机器人将全面引领海洋技术装备的发展,为研究海洋科学问题提供强有力的技术手段。在水面以无人科考船为支撑平台,在水下以无人科考站为支撑平台,将陆上实验室搬到海底,从海面向下和海底向上两个维度研究海洋。依托这两种支撑平台,为在海洋中的无人系统提供能源补充和信息交互,这样将建立基于海洋机器人的长期综合立体无人探测与作业系统,完全改变现在以人为主体的科考模式,开创以群体高智能水平的海洋机器人为核心的未来科考模式,为海洋科学的研究提供有高价值的科考数据,为人类更好地开发和利用海洋作出更大的贡献。
4 结束语
中科院海洋先导专项的顺利实施,带动了深海海洋技术的发展与进步,针对专项科学目标,取得了一批原创性科技成果,提升了我国海洋领域科技创新能力,为我国的科技事业创新跨越式发展作出了重要贡献。海洋先导专项首次把海洋作为一个整体,从系统的角度开展研究,各个项目之间有机联系,技术为科学提供先进的探测手段,而且深海技术装备本身也逐步形成为一个有机整体,构建了一个面向海洋科学研究的技术体系。针对科学问题,各种类型、不同功能、不同深度等级的海洋装备可以协同观测,获取大量多参数科考数据,为人类进入无人化时代探索海洋和认知海洋提供了一种新的技术解决方案和途径。
1 李靖宇. 以海洋强国为取向推进国家重大战略工程. 区域经济评论, 2014, (04)∶ 104-108.
2 钱洪宝, 俞建成, 韩鹏, 等. 我国大型深潜装备研发管理存在的问题及对策思考. 高技术通讯, 2016, 26(2)∶ 200-206.
3 俞建成, 刘世杰, 金文明, 等. 深海滑翔机技术与应用现状. 工程研究-跨学科视野中的工程, 2016, 8(2)∶ 208-216.
4 Jiang Z B, Liu T J, Xu H X, et al. Multivariable decoupling control based on TC control in the diving and floating process of AUV. Applied Mechanics and Materials, 2015, 741∶ 720-724.
5 Zhang D P, Wang J, Wang Y J, et al. A fast response temperature sensor based on fiber bragg grating. Measurement Science and Technology, 2014, 25(7)∶ 1-4.
6 Tian Z, Zhang X, Liu C, et al. Feasibility study on quantitive analysis of sulfide concentration and pH of ocean sediment pore water via Raman spectroscopy. Spectroscopy and Spectral Analysis, 2015, 35(03)∶ 649-656.
7 田陟贤, 张鑫, 刘昌龄, 等. 孔隙水中硫酸根和甲烷的拉曼定量分析可行性研究. 环境科学与技术, 2014, 37(7)∶ 162-166.
8 Zhao Q, Qu Y, Wang Y J, et al. Wavelength evolution of long-period fiber gratings in a water environment. Appl Opt, 2013, 52(11)∶ 2478-2483.
9 Chen Y H, Xu Y P, Ni Z T, et al. Design and development of a drifting buoyfor gathering environmental data. Advanced Materials Research, 2014, 3(1)∶417-421.
李 硕 中科院沈阳自动化所副所长,水下机器人研究室主任,研究员。中科院“热带西太平洋海洋系统物质能量交换及其影响”战略性先导科技专项“深海设备研发与应用”项目负责人。主要从事水下机器人总体技术、极端环境下的深海技术与装备研发等研究与应用工作。主持完成国家“863”等相关项目10余项,发表学术论文30余篇,申请并授权发明专利多项。E-mail∶ shuoli@sia.cn
Li Shuo Professor, Director of Marine Robotics Department, Deputy Director of Institute of Automation, Chinese Academy of Sciences. Professor Li is the project manager of Application and Development of Deep-sea Equipments, which belongs to the strategic pilot projectsexecuted by Chinese Academy of Sciences named as Western Pacific Ocean System∶ Structure, Dynamics and Consequences. His research focuses on the technology of underwater vehicles, and research, development and application of deep-sea equipments especially for the extreme underwater environment. He has been the principal investigator of tens of projects such as National “863” Plan, and lead to over 10 research papers and invention patents. E-mail∶ shuoli@sia.cn
唐元贵 男,中科院沈阳自动化所副研究员,水下机器人研究室海洋探测部部长。中科院“热带西太平洋海洋系统物质能量交换及其影响”战略性先导科技专项“深海设备研发与应用”项目主管。主要从事水下机器人总体优化技术、新概念水下机器人ARV研究与应用等相关工作。主持完成国家自然科学基金、中科院创新基金等项目5项,发表学术论文10篇,申请并授权发明专利9项。E-mail∶ tyg@sia.cn
Tang Yuangui Male, Doctor, Associate Professor, Head of Marine Exploration Group of Marine Robotics Department. Doctor Tang is the project supervisor of Application and Development of Deep-sea Equipments, which belongs to the strategic pilot projects executed by Chinese Academy of Sciences named as Western Pacific Ocean System∶ Structure, Dynamics and Consequences. His research focuses on the optimization of underwater vehicles, research and development of new generation of underwater vehicles, such as ARV. He has been the principal investigator of 5 projects including National Natural Science Fund, and lead to 10 research papers and 9 invention patents.
E-mail∶ tyg@sia.cn
Review and Prospect for Chinese Deep-sea Technology and Equipment
Li Shuo1Tang Yuangui1Huang Yan1Liu Tiejun1Liu Jian1Li Bin1Zhang Xin2Luan Zhendong2Wang Yongjie3
(1 Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China; 2 Institute of Oceanology, Chinese Academy of Sciences, Qingdao 266071, China; 3 Institute of Semiconductors, Chinese Academy of Sciences, Beijing 100083, China)
After nearly half-a-century of efforts, China has made considerable progress and development in ocean technology and equipment. Especially in these years, the development of deep-sea technology and equipment has provided new impetus to the innovation of ocean science in China. Based on the current situation of China's deep-sea technology and equipment, one of strategic pilot projects executed by Chinese Academy of Sciences named as Western Pacific Ocean System∶ Structure, Dynamics and Consequences, which is short for WPOS, puts forward the scientific application of deep-sea exploration and operational equipment. In order to meet the needs of scientific research, the WPOS project sets special task for developing integrated oceanographic surveys and operations using autonomous observing systems, continuous observing and operating systems, and new ocean sensors and sampling equipment. During the four years of implementation, the deep-sea technology and equipment for the special scientific objectives, has formed a fully independent intellectual property rights of equipment research and development capabilities in the application of ocean science. Great achievements in scientific research have been made and technical means have been provided for scientific analysis of ocean scientific issues and ocean phenomenon. All of those promoted the development of China's deep-sea exploration and operational technology. This project played an important guiding role in the country's deep-sea technology and equipment development.
deep-sea technology and equipment, autonomous observation, continuous observation and operation, new ocean observing sensors and sampling systems
*资助项目:中科院战略性先导科技专项(XDA1104 0000)
** 通讯作者
修改稿收到日期:2016年12月10日
