自走式奶牛精确饲喂机的单片机控制系统设计
2016-03-24李亚萍蒙贺伟高振江
李亚萍,蒙贺伟,高振江,李 辉,坎 杂
(1.石河子大学 机械电气工程学院,新疆 石河子 832000;2.中国农业大学 工学院,北京 100083)
自走式奶牛精确饲喂机的单片机控制系统设计
李亚萍1,蒙贺伟1,高振江2,李辉2,坎杂1
(1.石河子大学 机械电气工程学院,新疆 石河子832000;2.中国农业大学 工学院,北京100083)
摘要:为了提高奶牛精确饲喂技术水平、降低成本、减少工作量、提高个体奶牛产奶量,在前期完成自走式奶牛精确饲喂机机械结构设计和牛场信息管理系统设计的基础上,通过单片机控制系统的设计,实现奶牛饲喂数据的接收、牛只的个体精确识别、装备的行进及精确投料,实现了个体奶牛的自动化及智能化饲喂。试验调试验证表明:饲喂机的最佳行进速度为0.6m/s,识别距离达65cm,系统响应时间为0.4s;个体奶牛识别率96%,个体牛只识别正确率100%,给料误差小于2%。
关键词:个体奶牛;精确饲喂;单片机;控制系统;自走式
0引言
纵观21世纪初期我国奶牛业的发展,牛奶总产量得到了迅速增长,但人均牛奶占有量和消费量仍低于世界平均水平 。我国牛奶产量的增加主要由奶牛存栏量的增加引起,牛奶单产量的增加并不显著,仍有较大的上升空间。影响我国奶牛单产水平的主要因素是奶牛饲养管理[1],而饲养管理中饲料条件对奶牛的产奶量和牛奶品质起着重要作用[2-3]。精细养殖是精细农业的重要组成部分,实现奶牛的精细饲养将是未来的一个发展方向[4],而以个体体况信息为基础的精细养殖也将是现代奶牛科学饲养的主要研究方向[5]。如何利用现代化技术手段通过提高奶牛单产来提高牛奶产量成为一个亟待解决的问题。
奶牛饲喂技术从传统饲喂技术、TMR饲喂技术、固定式精饲料补饲技术到饲喂机器人技术的发展,各自有其优点和不足[6-8]。综合考虑投入成本、工作量、劳动生产效率、饲喂的灵活性,以及考虑到奶牛个体生理特征的不同、对精饲料需求不同,本文采用自走式奶牛精确饲喂机[9],实现奶牛的单体精确饲喂,饲料的按需配给,以奶定量,激发奶牛产奶潜能,降低生产成本,提高奶牛产奶量,实现奶牛的自动化及智能化饲喂。
1自走式奶牛精确饲喂机的工作原理
自走式奶牛精确饲喂机的工作流程如图1所示。

图1 自走式奶牛精确饲喂机的工作流程图
饲喂前,首先在上位机上运行奶牛信息管理软件,通过软件调用个体牛只生理特征信息,并对其饲喂量进行精确计算;个体牛只饲喂量信息与其ID号通过无线数传模块无线传输至装备控制系统,控制系统接收数据,并将其保存在单片机外扩存储器中,从而完成牛只个体信息的精确计算与数据传输。
饲喂过程中,首先启动饲喂机行进开关,通过人工操纵模式将装备行进至牛场精饲料场进行加料;完成后人工驾驶行进至待饲牛舍,继而将饲喂机由人工操纵模式调整至自动控制模式。
自动控制模式下,饲喂机在控制系统控制下自动行驶,当装备行进至个体牛只前时,识别系统通过佩戴在奶牛耳朵上的耳标对牛只进行精确识别,并将识别到的牛只信息发送至装备控制系统;控制系统控制装备停止行进并定位,同时调用该牛只饲喂信息、启动给料装置及精确投料,从而完成个体牛只精饲料的精确饲喂。该牛只饲喂结束后,饲喂机继续前进并对下一头奶牛进行饲喂。
整个圈舍饲喂结束后,饲喂机在人工控制状态,由工作人员将饲喂机停至停放室。
2控制系统总体结构及工作原理
2.1总体结构
控制系统的结构示意图如图2所示。
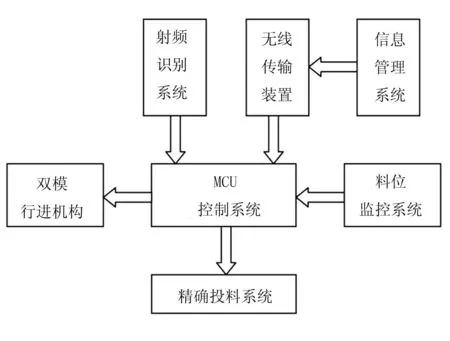
图2 控制系统结构示意图
该系统由MCU控制系统、RFID系统、数据无线传输装置、个体牛只信息管理系统、双模行进机构、料位监控系统及精确给料装置组成。
2.2工作原理
系统采用PC机作为饲喂管理平台,通过该软件完成个体牛只数据的采集和调用,经数据分析、计算后,将处理后数据经无线传输装置传送至MCU控制系统。单片机控制系统接收数据并将数据存储在外扩存储器中。
工作时,单片机控制系统控制装备在人工与自动行进两种行进模式下进行运行。饲喂时,装备在自动行进模式下进行行进;行进过程中,当饲喂机识别系统识别到个体牛只所佩戴耳标后,单片机控制系统接收牛只信息并控制装备停止行进。单片机控制系统对识别到的信息进行分析并确定是否投料:如果接收到的信息为有效信息,则控制步进电机驱动投料装置对牛只进行精确饲喂;否则,不进行投饲。当料仓精饲料不足时,料位监控系统发出警报信息并提醒工作人员进行加料。
3单片机控制系统设计
单片机控制系统的功能为:有接收信息管理系统发送的牛只信息数据;将牛只信息数据存储在外扩存储器;显示单片机运行状态;接收识别系统识别到的卡号并与存储器中数据进行对比;控制给料装置进行精确给料;控制饲喂机行进。
3.1单片机的选择
本研究采用宏晶科技开发生产的STC89C52单片机。STC89C52 是一款单片封装的微控制器,双列直插式封装,共40个引脚,其引脚配置如图3所示。
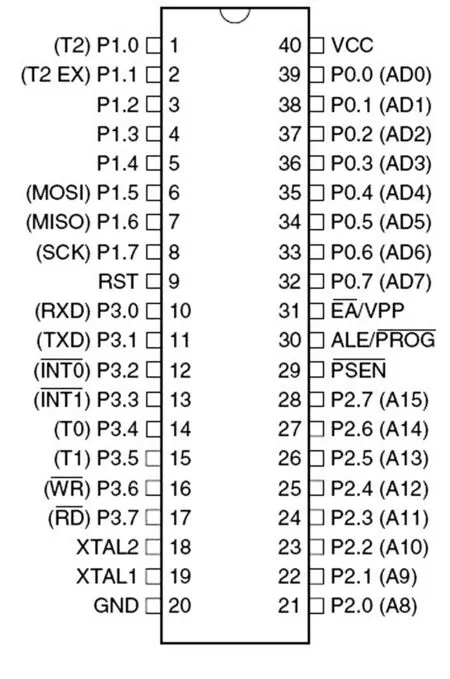
图3 STC89C52引脚配置图
由于牛场环境复杂、干扰源多,因此STC89C52以其高可靠性、超强抗干扰能力、低功耗、高性价比、开发简便等突出优势成为控制系统主要元器件。其具有512字节RAM、32 位输入输出口线、看门狗定时器、3个16 位定时器/计数器、6向量2级中断、全双工串行口、片内晶振及时钟电路等标准功能。
3.2单片机数据存储模块电路设计
存储器模块的主要功能为接收存储上位机发送过来的牛只信息。本文所研究存储模块采用铁电存储器FM1808,存储容量32kbyte。单片机地址锁存信号引脚和三态输出锁存器74HC373N的锁存允许端相连。
FM1808采用先进的铁电技术制造,其存储容量可达32kbyte,读写寿命100亿次,写数据无延时,存取时间短、功耗低,工作电流25mA,工作电压5V,工作温度范围-40~+85℃;同时,具有特别优良的防潮湿及抗震性能,适于牛场恶劣环境因素和装备工作振动环境。
FM1808使用28脚DIP,封装形式采用SOIC封装。各引脚功能说明如表1所示。
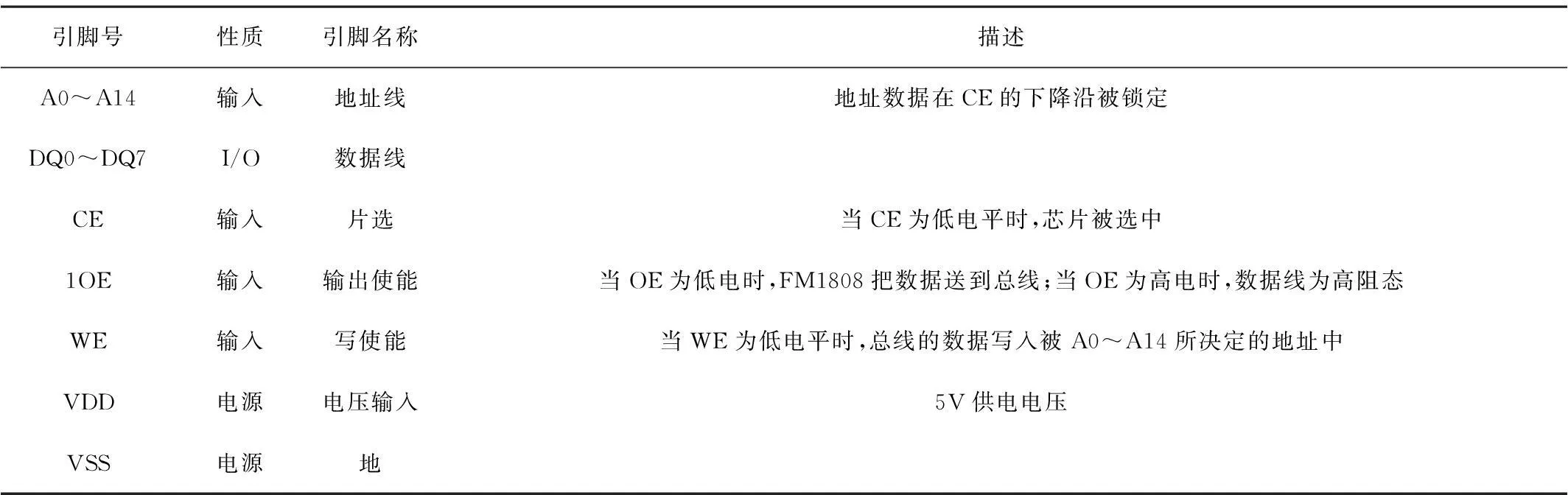
表1 FM1808引脚电器特性
存储器模块硬件连线原理图如图4所示。
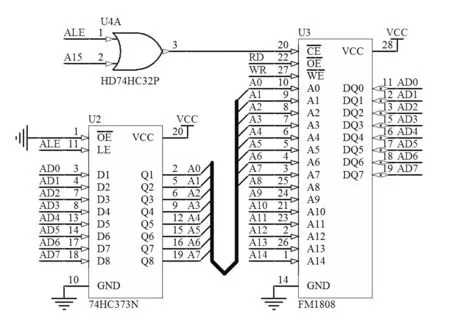
图4存储器模块原理图
其中,AD0~AD7为单片机P0端口,A8~A15为单片机P2端口,ALE地址锁存信号引脚,RD为读信号引脚,WR为写信号引脚。
3.3LCD模块的设计
LCD液晶显示模块用于显示单片机控制器的运行状态。当上位机向单片机发送信息时,显示数据发送的卡号和饲喂量信息;当单片机接收来自读卡器的数据时,显示接受到的卡号信息及卡号所对应的奶牛饲喂状态。LCD模块硬件原理图如图5所示。
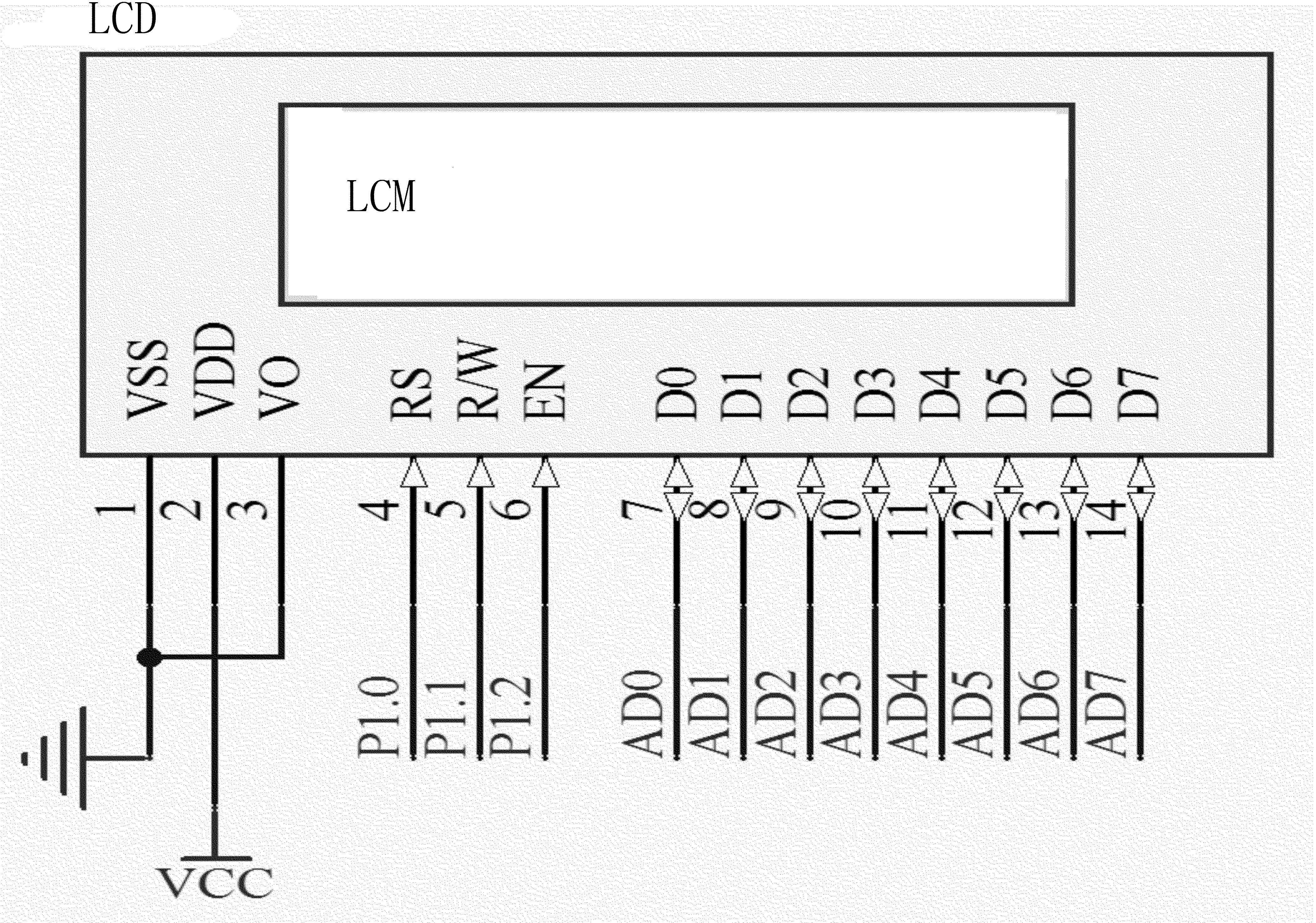
图5 LCD模块原理图
3.4上位机与单片机的通讯设计
无线传输装置实现装备上位机与单片机的通讯,本文所采用无线传输装置为RFD5800嵌入式无线数传模块,传输距离为1 000m,工作频率为470~510MHz,有UART/TTL、RS485、RS232等3种接口。无线传输装置与PC机及无线传输装置与MCU的连接图分别如图6、图7所示。
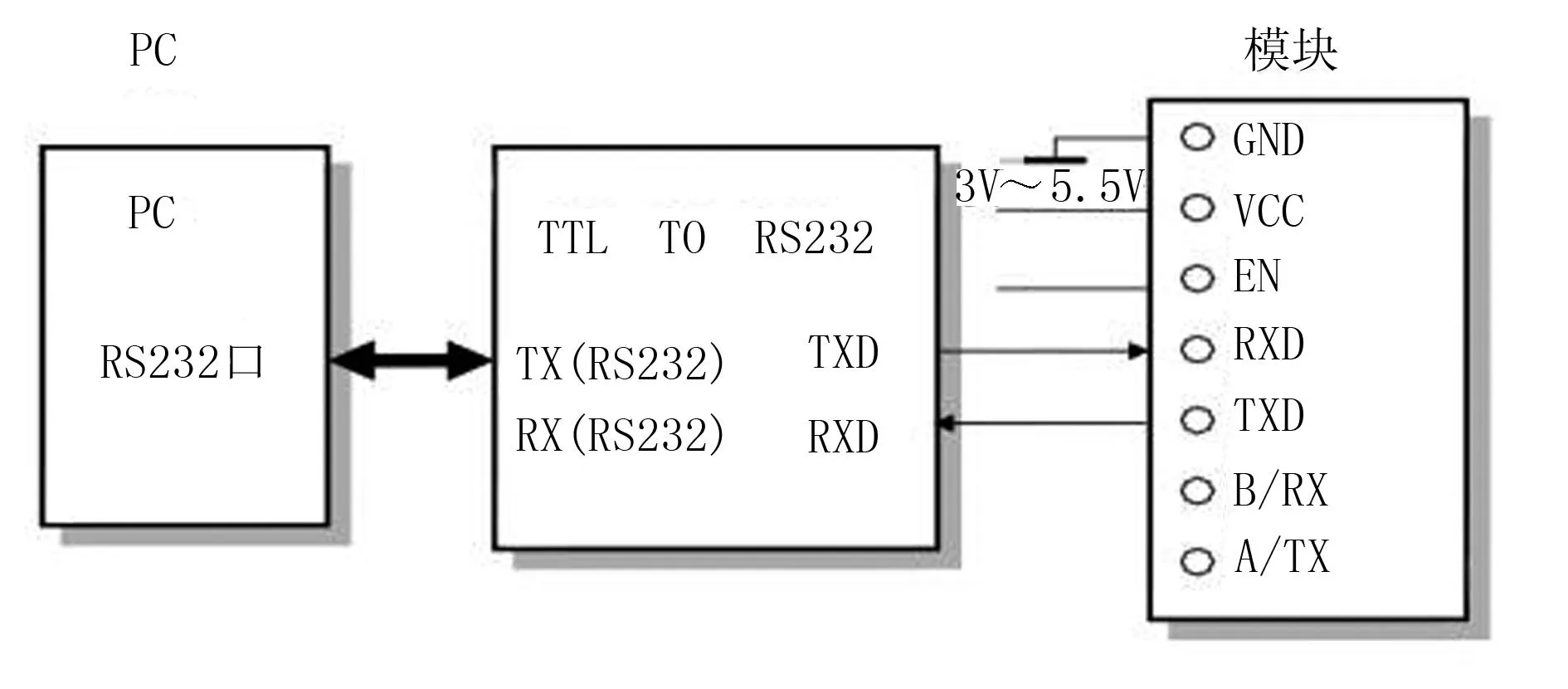
图6 无线识别装置与上位机的连接
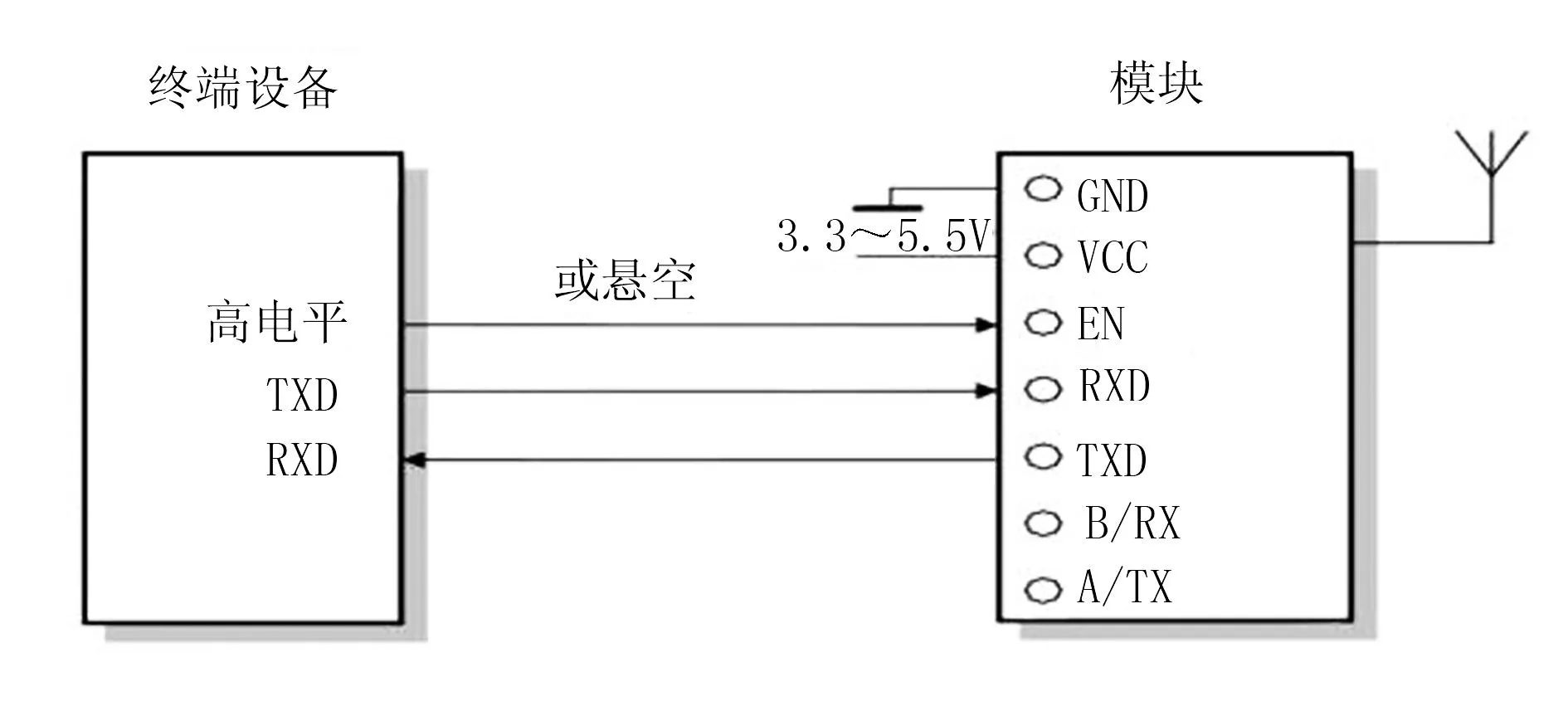
图7 无线识别装置与单片机的连接
3.5RFID与单片机的通信设计
本文RFID和单片机通讯采用串口进行通讯,其与无线传输模块共用1个串口,主要通过CD4052芯片对单片机串口进行分时复用,从而同时实现单片机与上位机、单片机与读卡器的通讯。串口原理如图8所示。
CD4052是差分4通道数字控制模拟开关,具有2个二进制控制输入端、1个INH输入,峰值为20V的模拟信号可通过幅值为4.5~20V的数字信号进行控制。CD4502引脚说明如表2所示。
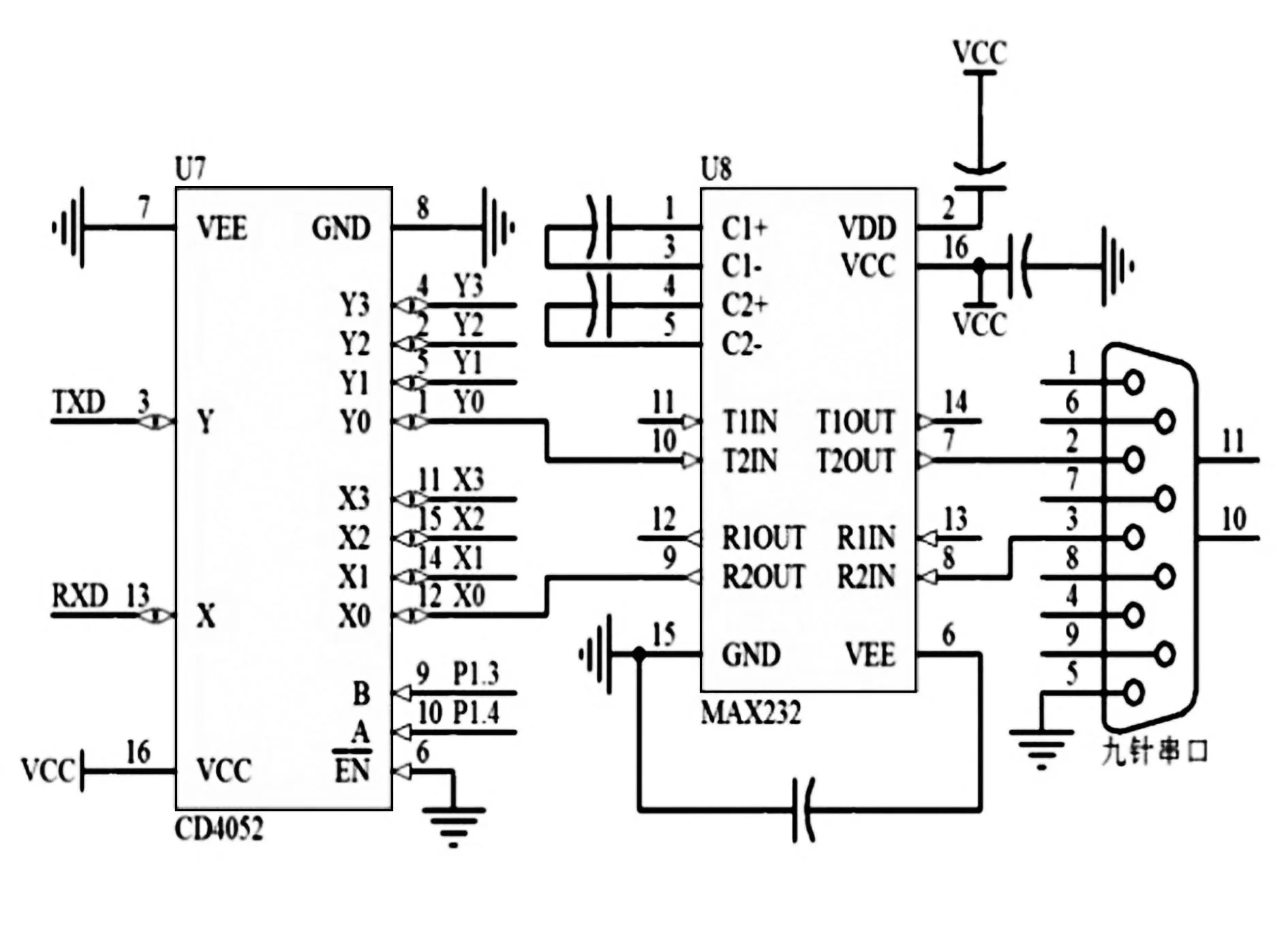
图8 串口模块原理图

引脚号符号功能124512131415IN/OUT输入/输出端91011ABC地址端3OUT/IN公共输出/输入端6INH禁止端7VEE模拟信号接地端8Vss数字信号接地端16VDD电源+
3.6料位监测系统的设计
料位监测系统用于实时监测装备料仓物料情况,当精饲料不足时,检测系统发出警报,提醒工作人员进行加料。本文所述系统主要由超声波料位测量模块、报警电路及报警指示灯组成。该系统采用自动测量模式,自动测量时间间隔为25ms,测量模块采用URM37V3.2超声波传感器。
系统测量距离4~500cm,灵敏度1cm,误差不超过1%。工作时,将测量值与设定值进行对比:当测量值小于或等于设定值时,超声波传感模块输出低电平,报警器不动作;当测量值大于设定值时,输出高电平,报警器动作,从而实现料位的检测报警。超声波模块各引脚功能如表3所示。

表3 超声波模块引脚功能说明
3.7试验验证
该饲喂行进机构采取双模行进方式,人工控制速度为0~6m/s,自动控制速度为0.4~1.2m/s。装备行进采用直流电动机,调速采用脉宽调制调速,电机带有制动装置;当饲喂机停机时,通过单片机控制制动器使饲喂机迅速降速并停止在固定位置。试验结果表明:自动控制模式下装备最佳行进速度0.6m/s,最佳识别距离65cm,系统响应时间0.4s,个体牛只识别率96%,识别正确率100%。
给料装置采用步进电机驱动螺旋给料装置进行给料,主轴转速采用60r/min,分别设定投料值为1.0、1.5、2.0、2.5、3.0kg,每个目标值进行10次试验,得到的精度试验结果统计如表4所示。由试验数据分析可知:给料精度误差不高于2%,符合奶牛精确饲喂要求。

表4 不同量程下投料量测量值
4结论
1)自走式奶牛精确饲喂机单片机控制系统的设计,有效实现了个体牛只饲喂数据接收、个体牛只精确识别、装备的自动行进及精确给料。
2)试验结果表明:单片机控制系统自动控制模式下装备最佳行进速度0.6m/s,最佳识别距离65cm,系统响应时间0.4s,个体牛只识别率96%,识别正确率100%,给料精度误差不高于2%,各项指标符合奶牛精确饲喂要求。
参考文献:
[1]李凤林,庄威.我国乳业现状分析及今后发展对策[J].吉林农业科技学院学报,2006,15(2):21-23.
[2]车玉媛,曹有才.影响奶牛产奶量的因素[J].养殖技术顾问,2008(9):9-14.
[3]熊本海,吕健强,罗清尧,等.基于Internet/Intranet集约化奶牛场精细养殖技术平台的构建[J].畜牧兽医学报,2005,36(11):163-169.
[4]李秀芝,王冉冉,杜现军,等.基于精细农业的奶牛自动饲喂系统[J].饲料工业,2010,31(7):5-6.
[5]熊本海,钱平,罗清尧,等.基于奶牛个体体况的精细饲养方案的设计与实现[J].农业工程学报,2005,21(10):118-123.
[6]邹阿玲,李军,李胜利,等.传统饲喂与TMR饲喂对泌乳中期奶牛生产性能的影响研究[J].中国奶牛,2011(17):58-60.
[7]宋占华,张世福,闫银发,等.智能化奶牛精饲料补饲机门禁围栏装置的设计[J].农业工程,2011,1(1):32-36.
[8]颜世涛,闫银发,宋占华,等.奶牛个体智能化精料变量补饲系统设计与试验[J].农业机械学报,2011,42( 2):168-172.
[9]高振江,郭跃虎,蒙贺伟,等.自走式奶牛精确饲喂机控制系统设计与验证[J].农业机械学报,2012,43(11):226-230.
Design of MCU Control System on Self-propelled Precise Feeding Machine for Cows
Li Yaping1, Meng Hewei1, Gao Zhenjiang2, Li Hui2, Kan Za1
(1.College of Mechanical and Electronical Engineering, Shihezi University, Shihezi 832000, China; 2.College of Engineering, China Agricultural University, Beijing 100083, China)
Abstract:In order to improve precise feeding technology for cows, cut down cost, decrease workload, and improve milk production of single dairy cow. On the basis of design of the mechanical structure and for self-propelled precise feeding machine and the information management system for dairy farm, the design of MCU control system was completed in this paper. The cow feeding data receiving and the recognition of the cows individual accurately were achieved, the travel of the equipment and precise feeding were realized. Automation and intellectualization were implementation. The experimental results showed that the best rate of the precise feeding machine was 0.6m/s. The recognition distance of card reader was 65 cm. The response time of machine was 0.4s. The control system can identify 96% of the single dairy cow correctly. The feeding error was controlled at below 2%.
Key words:single dairy cow; precise feeding; MCU; control system; self-propelled
文章编号:1003-188X(2016)02-0179-05
中图分类号:S818.5
文献标识码:A
作者简介:李亚萍(1980-),女,黑龙江虎林人,讲师,硕士,(E-mail)lyp_mac@shzu.edu.cn。通讯作者:蒙贺伟(1982-),男,新疆伊犁人,副教授,硕士,(E-mail)mhw_mac@shzu.edu.cn。
基金项目:国家农业科技成果转化资金项目(2010GB2G410603);新疆生产建设兵团科技支疆项目(2013AB005)
收稿日期:2015-02-02
