小麦精播机器人设计—基于图像融合与智能路径规划
2016-03-23张学明刘志刚
周 茉,张学明,刘志刚
(1.湖北工业大学 工程技术学院,武汉 430068;2.济源职业技术学院,河南 济源 459000;3.云南大学 软件学院,昆明 650091;4.南昌工学院,南昌 330108)
小麦精播机器人设计
—基于图像融合与智能路径规划
周茉1,张学明2,刘志刚3,4
(1.湖北工业大学 工程技术学院,武汉430068;2.济源职业技术学院,河南 济源459000;3.云南大学 软件学院,昆明650091;4.南昌工学院,南昌330108)
摘要:为了提高小麦的产量,并且在作业过程中使播种机器人成功绕过障碍物,需要对小麦播种路径精细的规划。为此,提出了一种新的路径规划方法,使用图像融合技术,结合模糊控制位移误差理论,实现了小麦播种机器人的自主路径规划。为了测试该方法的有效性和可靠性,设计了一款具备高清摄像功能和PC图像处理功能的精密播种机器人,并对其路径规划和播种效率进行了测试。结果表明:该机器人能够成功绕过障碍物,完成最优路径的规划,并在小麦播种过程中可以规划出近似矩形的播种路径。从机器学习和播种时间上的对比发现:该算法可以有效地提高机器学习速度,缩短播种时间,从而提高了小麦播种的自动化水平和作业效率。
关键词:小麦播种机器人;图像融合;路径规划;模糊控制
0引言
机器人在农业作业过程中已经被广泛采用,但目前使用的农业机器人一般是单人独自操作,劳动的单调性和重复性比较高,很容易产生强烈的疲劳感,最后导致误操作。因此,研制自主移动的机器人替代传统的机械拖拉移动机器人,可以有效地降低操作人员的疲劳强度,避免误操作的发生。在实际农业作业环境中,存在大量的障碍物(如田地表面的石块、田间沟壑及人工放置物品等),且在田间行走的动态物体也会成为障碍物,影响机器人的正常工作。因此,如何实现障碍物的规避,提高机器人的自主规划能力,成为农业机器人研究的重点。
1小麦播种机器人总体设计
小麦播种田间作业环境相对比较复杂,不仅存在着大量的静态障碍物,还存在一些动态的障碍物。因此,实现对障碍物的规避,提高机器人的自主规划能力是本次设计的重点,其总体的设计框架如图1所示。设计的主要原理是依据图像融合技术和模糊控制原理,通过机器学习,实现自主路径规划,最终得到近似的矩形路径。

图1 小麦播种机器人总体设计框图
图2为机器人结果总体设计图。该机器人主要由4部分组成,包括由粘带、供油系统、精密排种器及高速摄像系统等。排种器的设计如图3所示。

1.油泵 2.粘带 3.喷油嘴 4.精密排种器 5.高速摄像系统 6.种子

1.排种盘 2.种子室 3.吸室
本次设计采用气吸式的结构,种子由种子箱分流入种子室,吸室通过软管与风机相连。播种机工作时,吸种盘由动力系统带动旋转,完成种子的吸种和排种的过程。
2小麦播种机器人自主规划路径设计
2.1图像融合技术
在图像融合技术领域中,主成分分析法(PCA法)首先需要3个或3个以上的波段数据来计算得出图像之间的相关系数矩阵,再由计算得出的相关系数矩阵来计算得出特征值与特征向量,之后再计算出各主分量图像。其主要原理公式为
Y=TX
(1)
其中,X为变化图像的像素矩阵;Y为变换后图像的像素矩阵;T为变换矩阵。在图像融合时,首先计算图像的特征向量和特征值,计算源图像的特征值及特征向量,对特征值进行排序可以得λ1,λ2,…,λn;φ1,φ2,…,φn,则分量主量为
(2)
利用特征提取的结果,对第一主分量图进行直方匹配,做逆主分量变换,得到融合图像。假设TM为原始的多光谱源图像,PAN为高空间分辨率图像,将TM 的3个波段赋值RGB后进行RGB—IHS变换,可以得到分量以及两个中间量V1和V2,则
(3)
其中,V1和V2为在笛卡尔坐标系下的横轴与纵轴,亮度I用z轴表示。因此,色度H和饱和度S的表达式可以表示为
H=arctan(V2/V1)
(4)
用PAN替代I分量得到新的I分量I_new,即I_new=PAN,然后进行HIS-RGB变换。该图像融合技术的特点是:得到的融合图像的空间分辨率较高,色度和饱和度都与原图相同。
2.2模糊控制方法
为了实现小麦播种机器人的精密控制,提高路径规划的精度,选用模糊控制方法对路径规划的位移误差进行控制。模糊控制过程示意如图4所示。

图4 模糊控制基本原理
模糊控制算法的主要步骤如下:
1)根据期望得到的数值,来选择系统的初始输入值;
2)对输入变量的准确值进行模糊化;
3)根据相应的模糊规则,计算模糊域;
4)通过去模糊化的处理,计算出精确控制量。
参数自整定模糊 PID控制系统结构如图5和图6所示。
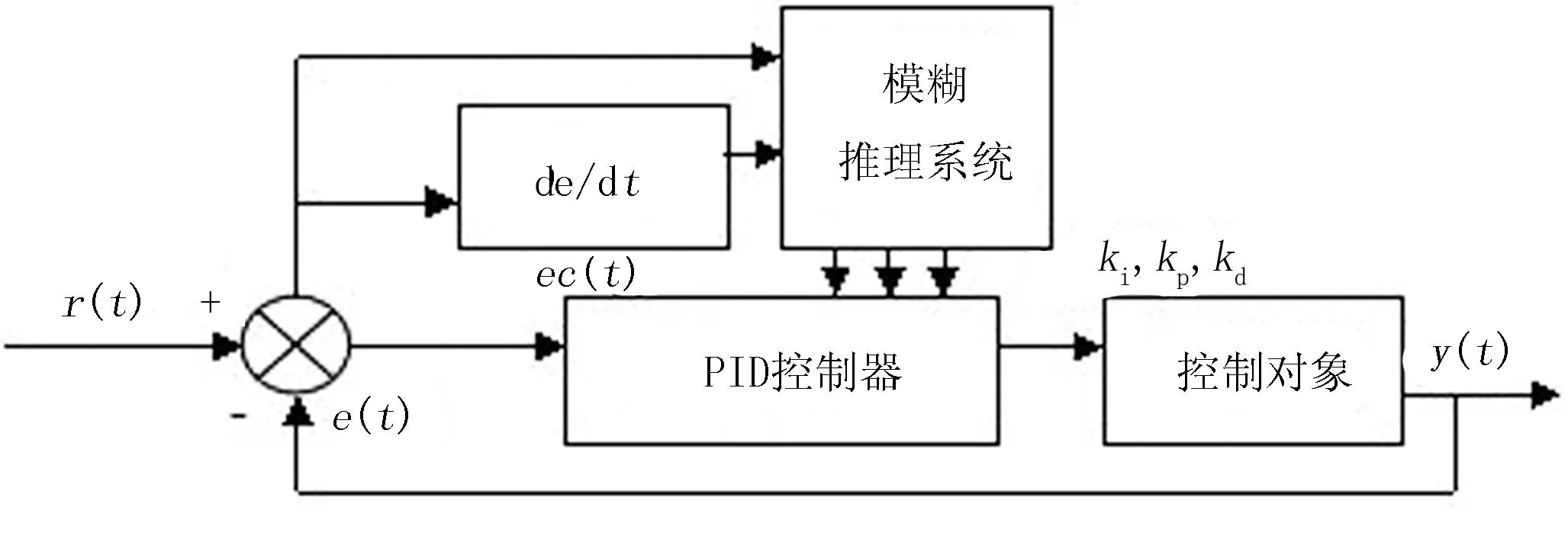
图5 模糊 PID控制参数整定示意图
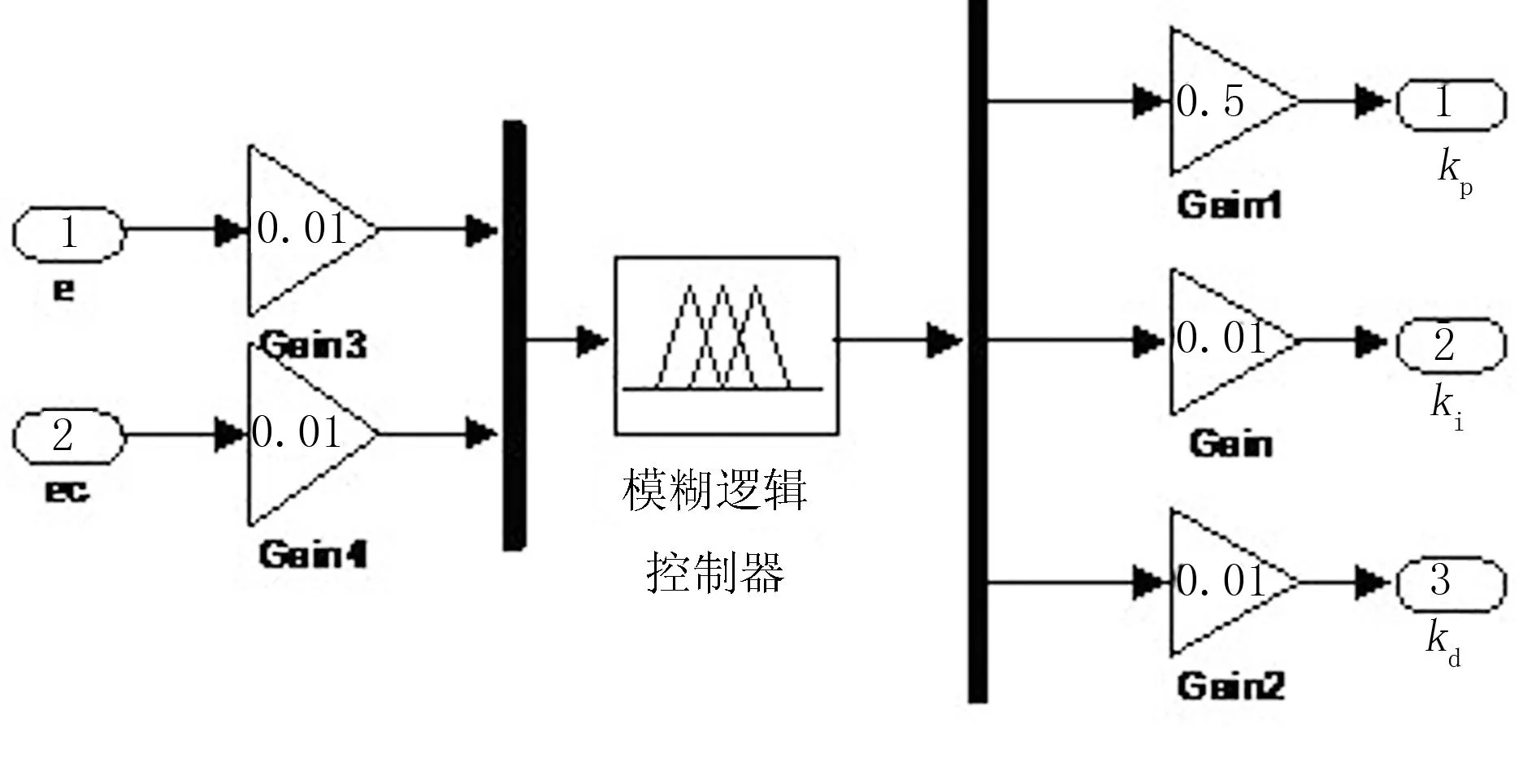
图6 模糊控制器
该参数整定的过程建立在常规的PID控制基础上,以目标规划路径反馈值和目标值的误差e和误差变化率ec作为输入,采用模糊控制原理对PID的3个参数进行整定,可使控制对象具有很好的动态和静态性能。
对于模糊控制的结果计算,可以使用MatLab来完成。MatLab提供的SIMULINK是一个用来对动态系统进行建模,仿真与分析的软件包,其功能强大、使用简单。路径规划的模糊控制原理如图7所示。
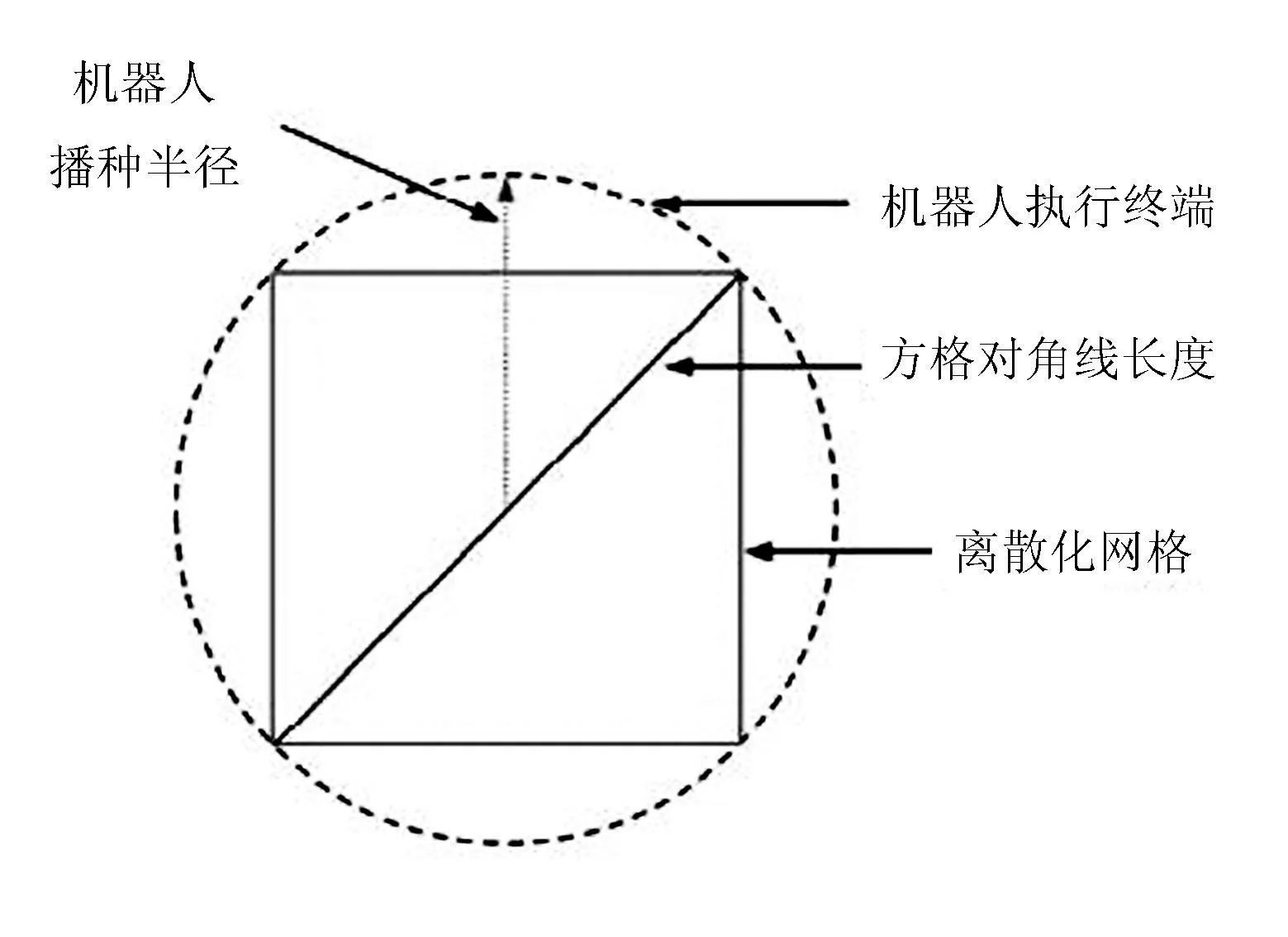
图7 机器人路径规划原理
当机器人为大方格式时,整个方格区域将被机器人作业覆盖,机器人通过模糊控制算法,搜索绕过障碍物的最佳距离;然后逐行进行播种,到达最后一行终点,认为全局的行间路径探索结束。
图8为机器人路径规划过程的示意图。当机器人处于无人导航状态时,在静态障碍物环境或完全未知环境下,机器人将开启摄像头对图像进行采集,并通过图像融合得到高分辨率的图像,实现实时路径规划。

图8 机器人路径规划过程示意图
3小麦播种机器人路径规划测试
为了测试设计的小麦精密播种机器人的性能,对小麦播种机器人进行了测试,项目主要包括路径规划的效率和播种时间。其中,使用的测试机器人如图9所示。

图9 测试机器人示意图
该机器人装有高清摄像头来完成图像采集功能,PC处理中心内置图像融合模块,最终处理结果以电信号的形式传输到执行末端,实现机器人的动作控制和路径规划。
图10为图像融合的结果。其图像融合过程是PC处理中心将Landsat-7TM的全色波段与4、3、2波段影像进行融合,将RGB三基色分别赋予与4、3、2波段,通过图像融合,得到了更加清晰的图像;利用该图像可以分析田地的障碍物等情况,完成播种机器人路径规划。
图11为机器人最优路径的规划过程示意图。由图11可以看出:在图像分析的基础上,机器人可以自主学习绕过障碍物,并可完成最优路径的规划。播种过程的最优路径规划的结果如图12所示。
为了提高小麦的产量,需要对小麦播种路径精细的规划。由规划结果可以看出:利用图像融合技术和模糊控制原理规划出近似矩形的小麦播种路径,效果很好。
为了测试模糊控制算法的优越性,将其和神经网络算法、遗传算法及蚁群算法进行对比,发现模糊控制算法机器学习耗时最短。对其播种时间进行统计,得到了如表1所示的结果。

图11 机器人最优路径规划

图12 小麦播种机器人路径规划效果

算法机器学习时间神经网络算法10.35遗传算法8.69蚁群算法5.36模糊控制算法3.28
为了对比本文设计机器人的高效率,对单垄的播种时间进行了统计,然后将其和传统机器人的播种时间进行了对比,最后对机器人进行了8次测试,得到了8组播种时间结果,如表2所示。

表2 播种时间测试
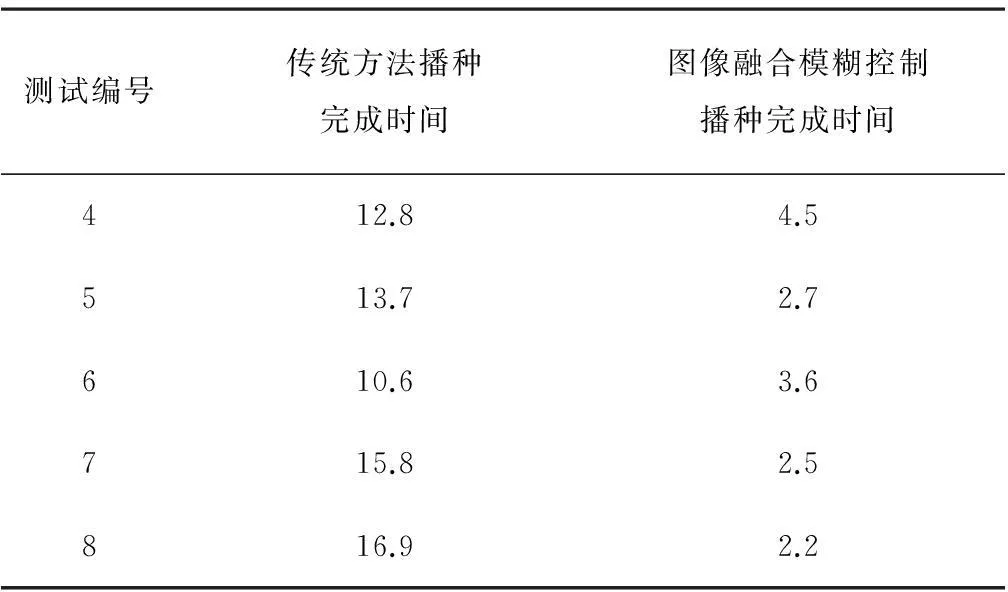
续表2
由播种时间测试结果可以看出:使用图像融合模糊控制算法对机器人进行控制后,机器人单垄的播种时间大大缩短,提高了播种速度及小麦播种的效率。
4结论
设计了一款新的可以自主规划路径的小麦播种机器人,它采用图像融合技术和模糊控制原则,提高了图像采集的分辨率,提升了机器人播种精度和作业效率。
为了测试机器人的性能,对路径规划的效率和播种时间进行了试验。结果表明:采用模糊控制算法的机器学习时间比神经网络、遗传算法及蚁群算法的都要短。与传统作业的播种机器人相比,本文所设计的小麦播种机器人的单垄作业时间明显缩短,效率大幅度提升,为小麦播种机的优化设计提供了较有价值的参考。
参考文献:
[1]韦艳,陈华根.GPS定位显示中的坐标转换[J].海洋测绘,2010,30(3):16-19.
[2]郝冬,刘斌.基于模糊逻辑行为融合路径规划方法[J].计算机工程设计, 2009,30(3):660-663.
[3]王建军,武秋俊.机器人在农业中的应用[J].农机化研究,2007(7):174-176.
[4]王俭,赵鹤鸣,陈卫东.基于子区域的机器人全覆盖路径规划的环境建模[J].苏州科技学院学报:工程技术版,2004,17(1):72-75.
[5]冯秀军,杨立东.2BDY-8型2垄密型高速气吹式精密播种机简析[J].农业机械,2007(8):85-86.
[6]王建军,武秋俊.机器人在农业中的应用[J].农机化研究,2007(7):174-176.
[7]郝冬,刘斌.基于模糊逻辑行为融合路径规划方法[J].计算机工程设计,2009,30(3):660-663.
[8]王建军,武秋俊.机器人在农业中的应用[J].农机化研究,2007(7):174-176.
[9]李建中,高宏.无线传感器网络的研究进展[J].计算机研究与发展,2008,45(1):63-72.
[10]邱天爽,唐洪,李婷,等.无线传感器网络协议与体系结构[M].北京:电子工业出版社, 2007.
[11]石鹏, 徐凤燕,王宗欣.基于传播损耗模型的最大似然估计室内定位算法[J].信号处理,2005, 21(5): 502-504.
[12]李洪欣,杨建中.基于两参数的表冷器建模方法研究[J].建筑热能通风空调,2009,28(6):15-17.
[13]孟庆山.水源热泵机组变流量水系统节能优化探讨[J].制冷与空调,2010,10(1):84-89.
[14]谢志勇,张铁中,赵金英.基于 Hough 变换的成熟草莓识别技术[J].农业机械学报,2007,38(3):106-109.
[15]王东,赵宇,王秀红.一种改进的DFT迭代的MIMO-OFDM系统信道估计算法[J].应用科技,2009, 3(3):19-22.
[16]徐文颖,张静,董建萍.导频信道估计中的插值算法[J].上海师范大学学报,2007, 12(6):41-46.
[17]陈晖,陈晓光.基于直接判决导频跟踪的OFDM系统快时变信道估计[J].通信学报,2006, 9(27):1-5.
[18]李文见, 姬江涛. 轮履复合式农业机器人越避障控制研究[J]. 河南科技大学学报:自然科学版,2007(8):57-59.
[19]王仲民, 戈新良, 唐智强.多传感器信息融合技术研究现状和发展趋势[J].河北工业大学学报,2003, 32(2):30-35.
[20]国刚, 王毅. 应用BP神经网络进行手写体字母数字识别[J].人工智能及识别技术, 2008, 4(6):1459- 1460.
[21]施少敏, 马彦恒, 陈建泗. 基于BP神经网络的数字识别方法[J]. 兵工自动化, 2006, 25(10):40-41.
Design of Wheat Precision Seeding Robot—Based on Image Fusion Technology and Autonomous Path Planning
Zhou Mo1, Zhang Xueming2, Liu Zhigang3,4
(1.Engineering and Technology College,Hubei University of Technology, Wuhan 430068,China; 2.Jiyuan Vocational and Technical College, Jiyuan 459000, China; 3.School of Software, Yunnan University, Kunming 650091, China; 4.Nanchang Institute of Science & Technology,Nanchang 330108, China)
Abstract:In order to improve the yield of wheat, and makes a successful seeding robot around obstructions in the process of operation, we need to play a careful planning for wheat seeding paths. It puts forward a new method of path planning, the method USES image fusion technology, combined with fuzzy control displacement error theory, it realized wheat seeding robot autonomous path planning.In order to test the validity and reliability of the method, has designed a high-definition camera and PC image processing function of the precision seeding robot, and the path planning and the seeding efficiency was tested. Through test, found that the robot successfully bypass obstacles, complete the optimal path planning, and in the process of wheat sowing seeds can plan out the approximate rectangle path, from machine learning and sowing time on contrast, it was found that the algorithm can effectively improve the speed of machine learning, shorten the sowing time , which can improve the automation level and work efficiency of wheat sowing.
Key words:wheat precision seeding robot; image fusion; path planning; fuzzy control
文章编号:1003-188X(2016)06-0026-05
中图分类号:S225.5;TP242
文献标识码:A
作者简介:周茉(1981-) ,女,湖北鄂州人,讲师,硕士。通讯作者:刘志刚(1980-),男,湖北天门人,副教授,博士,(E-mail)fiberhome@126.com。
基金项目:湖北省自然科学基金面上项目(2014CFB589);中央高校基本科研业务费专项(2014QC004);太阳能高效利用湖北省协同创新中心开放基金项目 (HBSKFMS2014032)
收稿日期:2015-05-28
