电动力喷雾机控制系统设计与试验
2016-03-23荣喃喃王冉冉齐苗苗
荣喃喃,王 震,李 杰,王冉冉,齐苗苗
(1.山东农业大学 机械与电子工程学院,山东 泰安 271018;2.山东省园艺机械与装备重点实验室,山东 泰安 271018;3.国网泰安供电公司,山东 泰安 271018)
电动力喷雾机控制系统设计与试验
荣喃喃1,王震2,李杰3,王冉冉1,齐苗苗1
(1.山东农业大学 机械与电子工程学院,山东 泰安271018;2.山东省园艺机械与装备重点实验室,山东 泰安271018;3.国网泰安供电公司,山东 泰安271018)
摘要:针对现代电动力农业机械自动化发展不成熟的现状,为弥补电动力喷雾机在远程智能控制方面的不足,设计了自走式电动力喷雾机控制系统。通过各部件需求分析和计算,研制了电动力输出装置和远程控制系统,实现了各部件协调工作及远程遥控喷雾作业。整机动力来源为60V铅酸蓄电池串联组,通过控制系统工作试验可知:整机电动力传输效率为88.8%,遥控信号接收并处理成功率达99%;整机电动力利用率较高,续航时间达2.98 h。
关键词:喷雾机;电动力;控制系统
0引言
随着能源紧缺问题的严重和大气污染程度的加剧,以电动力为代表的新能源农机具逐渐成为农机领域的发展趋势。此类机具以电动力替代配套柴油或汽油动力,具有结构简洁紧凑、控制灵活、低碳高效、无尾气噪音污染和维护成本低的优点[1-2]。
当前正处于电动力和农机具的技术磨合期,农机具的控制自动化程度较低,针对此发展现状,以喷雾机为例设计研制了一套适用于微型农机具的电动力远程控制系统。整机采用了先进的电动汽车驱动技术,设计了电动力传输子系统,搭载红外远程遥控信号处理子系统,有效地提高了控制命令收发的准确度和能源利用率,为智能化电控技术在农机领域的应用提供范例。
1控制系统组成及工作原理
控制系统主要包括行走驱动子系统和远程控制子系统。其主要工作流程:根据提前设定的工作信号代码,使用手持式遥控发射器发射前进信号;安装在车体上的遥控信号接收设备立即接收此信号,经内部微处理器处理后向电机控制器发出整车前进的命令信号,电机控制器控制伺服电机按照命令前进;在前进过程中,可随时发送转向信号,调整行走路线,使整车到达预定喷雾地点;果农此时发送喷雾信号(包括启动中压风机和高压水泵的命令),整个过程按照预设路线行走,即可远程遥控完成喷雾作业[3]。其协同工作原理图如图1所示。
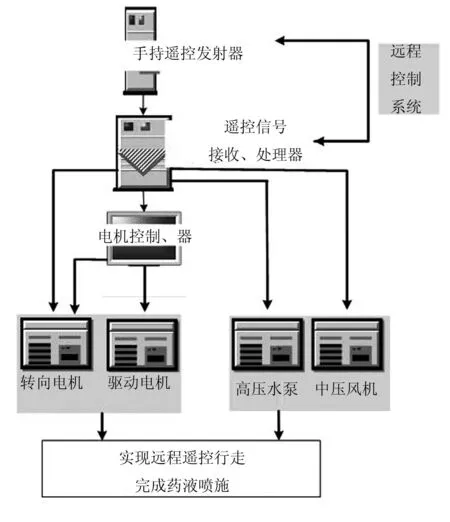
图1 工作原理图
2行走驱动子系统
行走驱动子系统包括后桥驱动系统和转向系统。
2.1 后桥驱动系统
驱动桥位于动力传输线的末端,其基本功能是增大变速器传递的转矩,将转矩合理分配给左右驱动轮,实现差速行驶[4]。同时,驱动桥作为整车机械部分的重要部件,还要承受作用于路面和车架的铅垂力和横向力[5]。本次设计考虑到恶劣的农田作业环境和整车较大载荷,驱动系统所要承受的载荷和作用力矩都比较大,因此驱动部件应具有足够的承载力、翘度和刚性。综合考虑整车前进的通过性和平顺性,驱动系统采用一体式后桥驱动系统总成,主要包括三相无刷直流电机、主减速器、差速器、驱动车轮的传动装置和桥壳等,如图2所示[6-8]。

图2 后桥驱动总成
2.2 转向系统
转向系统采用电动助力转向系统(Electric Power Steering,EPS),即由转向电机提供辅助转矩,其助力的大小和方向由电子控制单元(ECU)控制,只在需要助力的时候起动电动机[9]。EPS是近年来比较流行的动力转向器,没有电液动力转向器的体积大、部件多、管路漏油等造成的耗能、污染环境的缺点,且EPS的机械结构和应用部件较简单,安装起来非常方便[10-12]。喷雾机工作在路况较差的农田,整车工作时转向阻力较大,因此采用转向齿轮驱动,即转向电机及转向器与转向小齿轮相连。
3远程控制子系统
远程控制子系统是所有信号的接收和处理系统,其精确性和稳定性是决定喷雾作业是否达标完成的重要因素。整个远程控制系统主要由手持式遥控信号发射器、远程信号接收设备及电机控制器组成。
3.1 信号发射和接收设备
该遥控信号收发设备装置安装在农机具上,工作环境处于湿度较大的农田,遥控距离较远;同时要满足冬季和夏季施药的高温、低温情况,因此信号收发的精准度相对于理想情况有所降低。加之机具应用人群为广大果农,遥控装置要操作简单易掌握。综合分析,设计信号发射和接收装置采用红外感应方式,由8路继电器实现简单通断控制。其装置工作电压为24V,信号频率为315MHz,红外感应距离达2km,开阔地接收灵敏度大于-103 dBm,传输速率大于10kbps,调制方式为调幅。为增加遥控装置的功能可扩展性,对码方式设定为智能学习型,可根据不同的功能需求定制修改。首次使用时完成清码和对码,设置为自锁工作模式,以后即可正常使用。根据喷雾作业流程,预先设置8路信号为前进、后退、刹车、左转向、右转向、风机、水泵和一路预留信号。
3.2 电机控制器
电机控制器控制伺服电机执行整车行走命令,是整个电控系统的核心所在,也是本次设计的重心所在,其性能的优劣直接决定了喷雾作业效率。电机控制器的直接作用对象为三相无刷直流电机(BLDC),为实现控制系统的稳定性,同时优化算法、节省经费投入、缩短研发时间,设计研制时重点使用MatLab/Simulink建立仿真控制模型,然后进行优化设计、制作调试。
3.2.1电机运行数学模型
图3所示为BLDC的控制框图,分析BLDC(星结)的工作模态,建立式(1)~式(4)来表征电机本体模型[13]。式(1)~式(3)表示了3个相电压的计算公式,其为电阻电压、电感电压和反电动势的矢量和,则

(1)

(2)

(3)
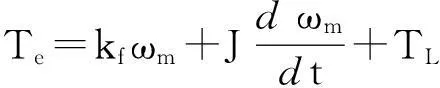
(4)
其中,U、i、e为相间电压、相电流及反向电动势;R、L为各相电阻和电感;Te为电磁转矩;TL为负载转矩;kf为摩擦因数;ωm为电机角速度。
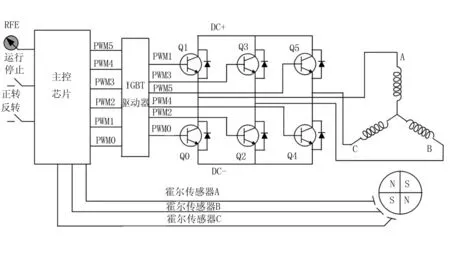
图3 BLDC控制框图
各相反电动势为
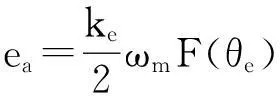
(5)
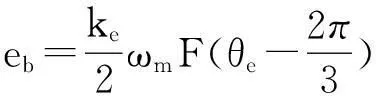
(6)
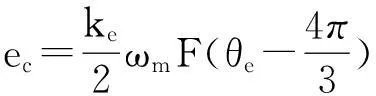
(7)
电磁转矩为

(8)
其中,ke、kt为反电动势系数和转矩系数;θe为电角度(θe=pθm/2);函数F(θe)表示反电动势梯形波形。
F(θe)的一个周期为
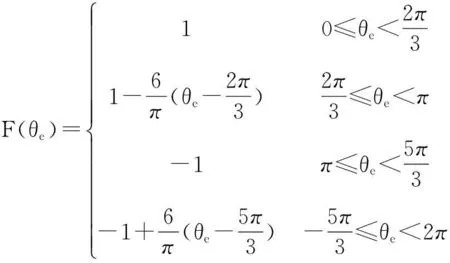
(9)
为了更便捷地在MatLab/Simulink中建模,根据相间电压公式,利用基尔霍夫电流定律(KCL),把电机的数学模型转化为空间矩阵形式[13]。其具体计算过程不再赘述,BLDC完整的数学矩阵模型为
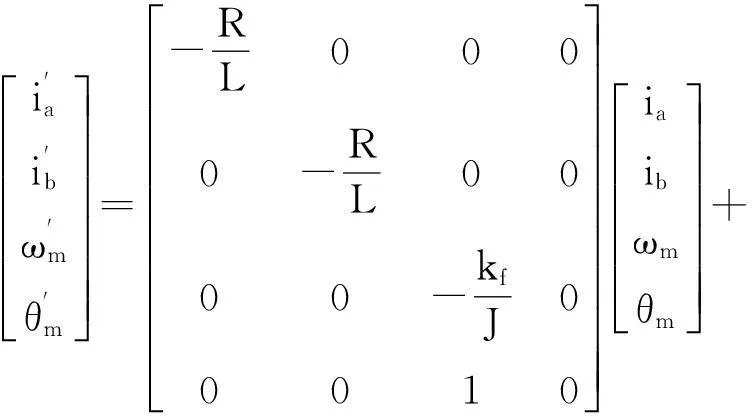
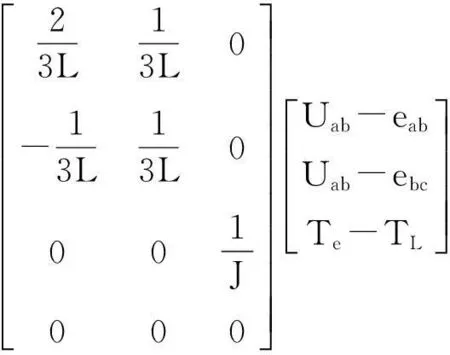
(10)
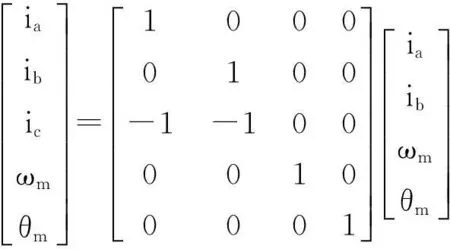
(11)
3.2.2MatLab/Simulink 模型与仿真
根据模块化建模思想,将图3所示的控制系统分割为各个功能独立的子模块,主要包括电机本体模块、逻辑换相模块、桥式驱动模块速度、速度和电流控制模块等。
1)仿真模型建立。根据式(10)~式(11)搭建电机模型,主要包括电机本体模块、反电动势方程模块及转速检测反馈模块。模型中的参数均来自于一体式后桥驱动系统中的三相无刷直流电机的官方说明书,BLDC模型如图4所示。为方便分区、节省空间,反电动势模块和转速检测模块已集成子系统[14-15]。电机控制主回路采用三相全桥逆变电路,根据三相导通六状态的工作时序原理[16],采用Pulse Generator触发各桥臂IGBT导通和关断,脉冲宽度设为50%,周期设定为0.02 s。根据开始时刻来设定延迟时间,仿真时采用变步长的odel5s算法。
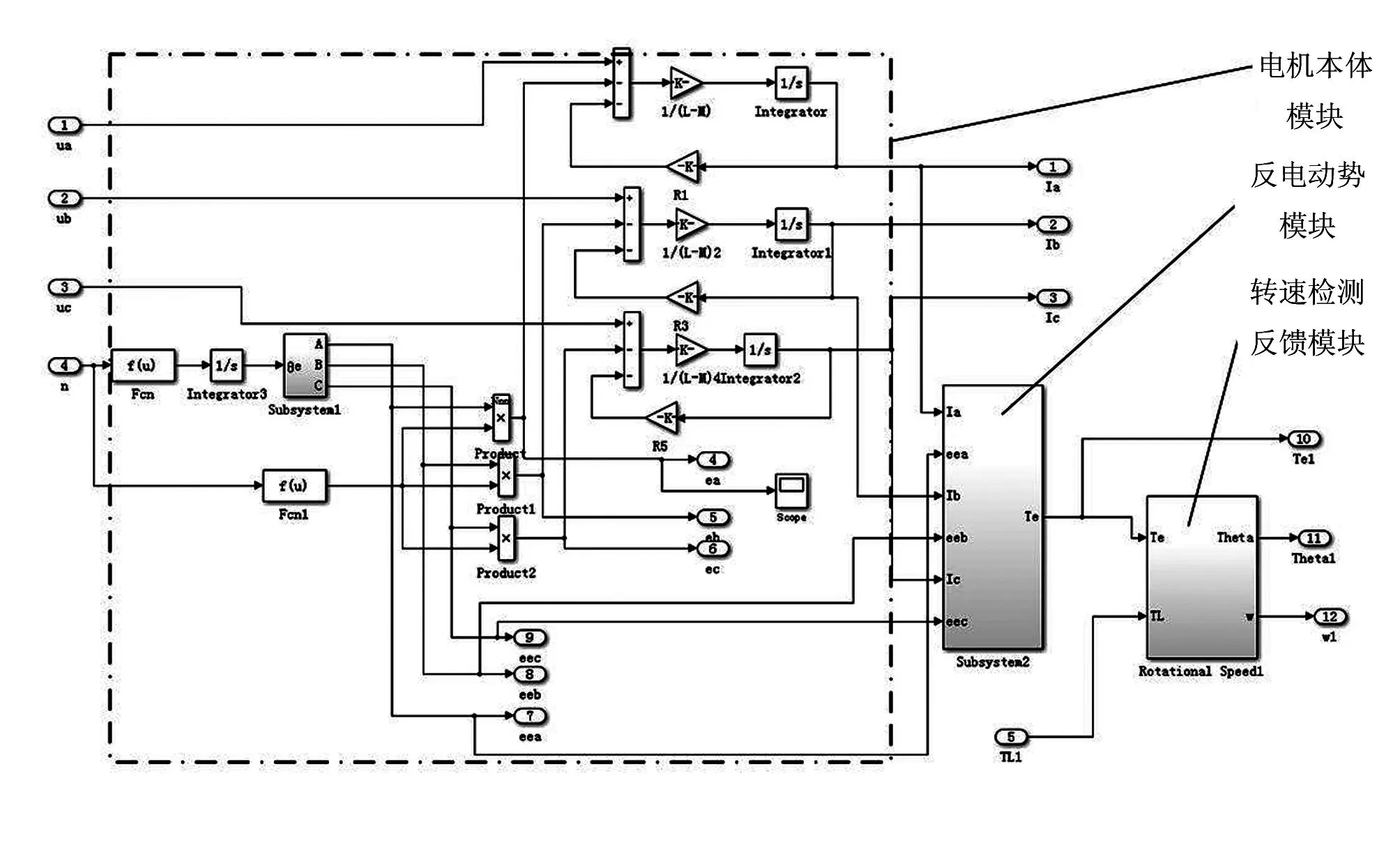
图4 无刷直流电机模型
完整的控制仿真界面如图5所示。图中,速度控制模块、电流控制模块等其他部分均已封装为子系统。

图5 BLDC控制系统仿真界面
2)仿真试验结果。根据弥雾机作业情况设定参数,电机工作电压为60V,电机转速为3 000r/min。
首先运行仿真系统,观察转速的波形图,如图6所示。从转速情况来看,电机运行情况比较稳定,在启动的0.085 s达到工作转速,且转速维持平稳状态。
设定参数,仿真电机的停止过程,观察波形(见图7),电机在接到停止的信号命令之后的0.09 s,转速由3 000r/min变化为0,降速过程平稳,满足农药喷施均匀的作业要求。
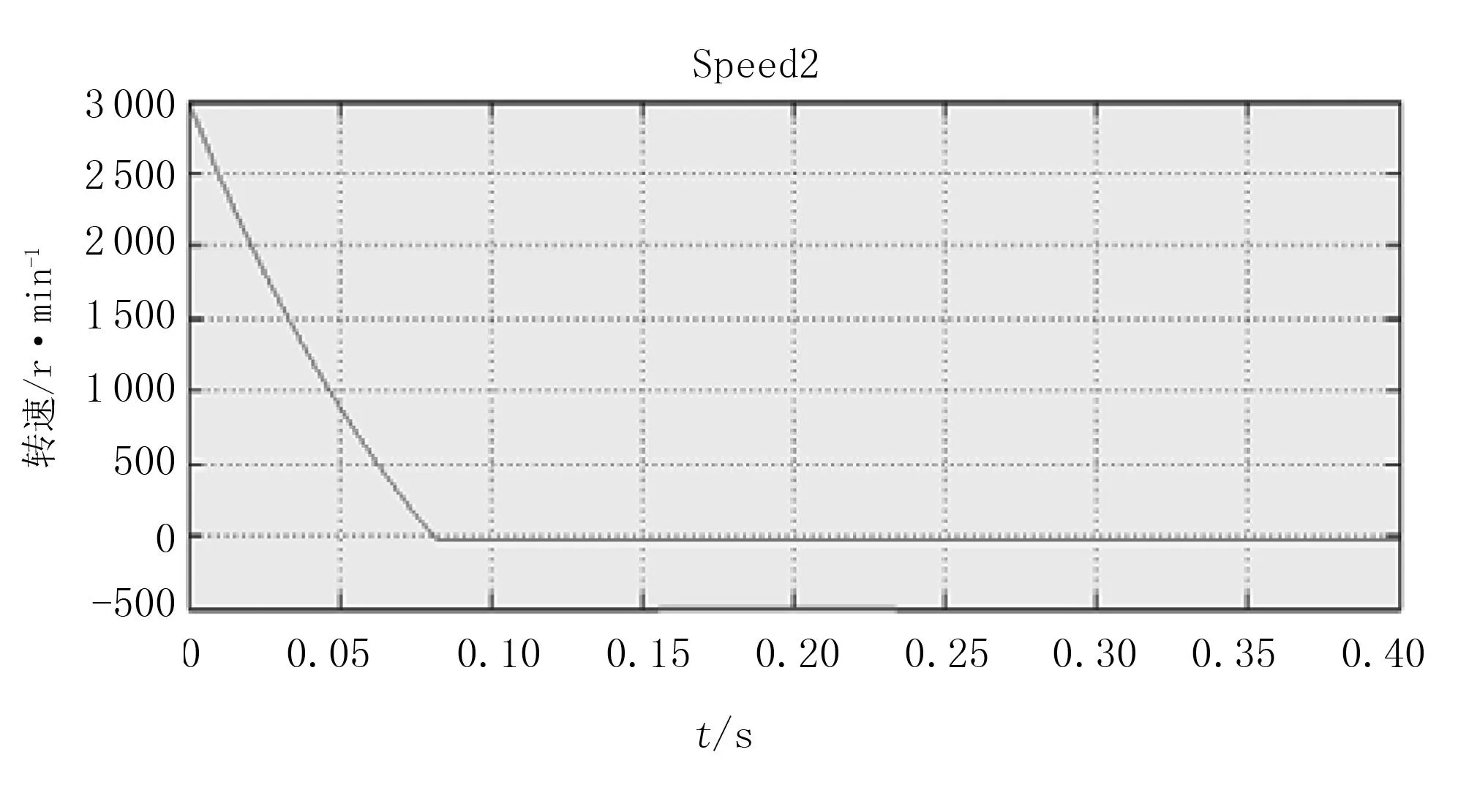
图7 停止转速
图8所示为在系统运行过程中添加外来干扰,克服扰动的过程。仿真采用变动负载转矩的方式,从放大的图片来看,系统调节能力比较好,能够在1 s内从不稳定状态恢复到稳态。
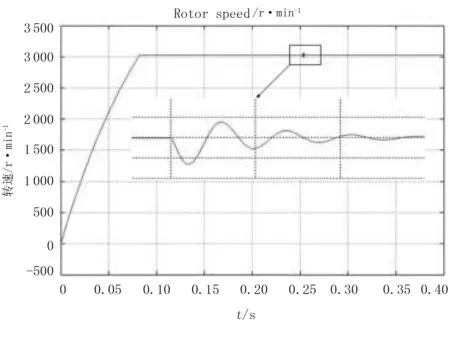
图8 干扰测试转速波形
从以上仿真试验分析来看,电机整个控制系统比较稳定、精准,满足喷雾作业的要求。但因仿真系统各参数偏理想化,提速和降速时间均小于实际工作情况,故在实际电机控制器研制时序设计方面应适当留有部分时间余量。
4控制系统工作测试
4.1 测试系统平台搭建
根据以上各系统主要部件分析、设计和制作,搭建了整个控制系统,如图9所示。值得注意的是控制系统处在药液飘散的喷雾带,所处的环境湿度很大,故各部件均需搭配外壳。
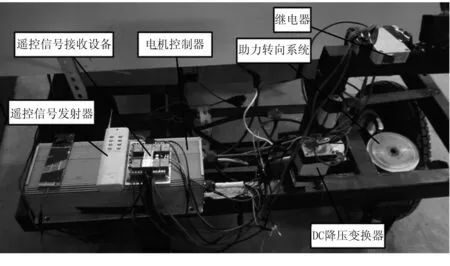
图9 控制系统实物图
4.2 控制系统测试方案和结果分析
4.2.1测试方案
试验在山东农业大学试验田进行,为完整测试遥控信号的收发情况,选取了5处周边障碍物情况不同的地方。
1)5处地方编号为①~⑤,其地带开阔等级逐渐降低,每处均发射3次前进、停止、倒车、转弯和喷雾信号,发射距离均大于500m,记录控制系统的信号收发情况并观察小车运行情况。
2)在每一处试验时测量控制电路部分点位的电压和电流值,计算其工作功率。主要点位为蓄电池组输出端、降压变换器输出端、中压风机的输入端、高压水泵输入端,同时记录小车运行的时间和里程。
4.2.2测试结果分析
表1为整个试验的数据统计表。
1)从表1中可看出:共计75次信号发射接收试验,1次失败,且失败出现在周围障碍物较多的⑤号场地。试验的信号收发成功率平均为99%,而一般作业场地的信号收发成功率为100%。
2)每次场地试验时均大致估算总工作效率,开阔性较好的场地工作效率较高,试验平均工作效率为88.8%。
3)整车电动力能源利用率较高,5块铅酸蓄电池组可支持整机平均续航2.98 h。
从以上数据分析证明,本电动喷雾机的控制系统设计合理,各项功能满足预期目标,实现了电动力远程遥控农田作业。
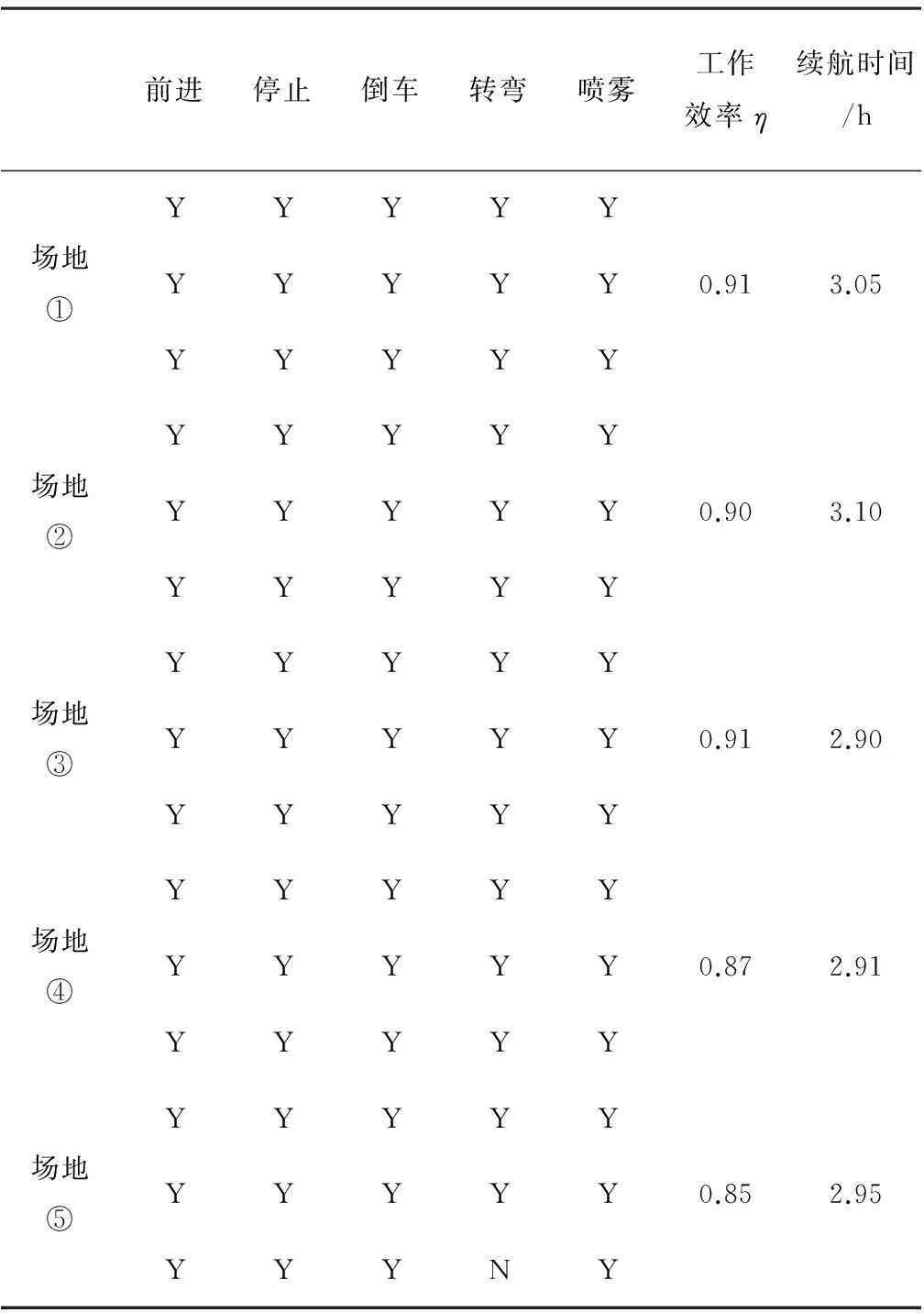
表1 测试结果
①Y表示信号收发成功,小车正确执行命令;N表示信号收发失败,小车无动作或执行错误命令。②工作效率计算公式(估算):η=各电动力部件总消耗功率/蓄电池组总输出功率。
5结论和展望
本文设计的控制系统建立在先进的电动汽车驱动和转向技术基础之上,利用智能控制技术实现农田作业的远程遥控。从测试数据分析来看,该控制系统不仅可满足喷雾基本作业功能需求,而且大大提高了能源的利用率和工作效率。本研究为电动力在农具领域的应用提供了探索方向,但是因该控制系统由多个部件搭建而成,性能存在一定的不稳定性,在未来的研制中应加进开发一体式总成控制箱。
参考文献:
[1]张铁民,闫国琦,温利利,等.我国电动力农业机械发展现状与趋势[J].农机化研究, 2012,34(4):236-240.
[2]籍俊杰,李谦.智能化农业与智能化农机装备[J].农业技术与装备,2012(3):27-31.
[3]闫龙涛.基于XC2268N的纯电动汽车整车控制器设计[D].天津:天津大学,2012.
[4]吕俊磊,刘有源. 汽车驱动桥疲劳试验控制系统研究[J].武汉理工大学学报:交通科学与工程版,2013(1): 201-204.
[5]徐珊珊,戴长波.汽车驱动桥壳疲劳寿命分析及结构优化[J].机械工程师,2012(8): 52-53.
[6]张步良,冯喜成,刘志英. 拓扑优化技术在车桥减速器壳开发中的应用[C]//第一届结构及多学科优化工程应用与理论研讨会.大连:中国力学学会,2009.
[7]张学忱,张涛,张慧波. CA1040P90L2轻型货车驱动桥设计[J].工程图学学报,2011(6):5-8.
[8]钱斌,朱顺利.汽车驱动桥总成结构设计、三维建模与虚拟装配研究[J].安徽工程科技学院学报:自然科学版,2009(3):21-23,26.
[9]张明宇,段燕. 汽车电动助力转向系统[J].湖南农机,2013(3):40-41.
[10]王迅.电动助力转向系统(EPS)技术现状与发展[J].湖北汽车工业学院学报,2008(3):21-24.
[11]郭翰中.电动助力转向系统助力控制策略研究[D].重庆:重庆大学,2011.
[12]姚胜华.电动助力转向系统的研制[D].杭州:浙江大学,2001.
[13]Stefan Baldursson. BLDC Motor Modelling and Control - A Matlab Simulink Implementation[D]. Goteborg: Chalmers Tekniska Hogskola, 2005.
[14]翟亮,凌民.基于MatLab的控制系统计算机仿真[M].北京:清华大学出版社,2006.
[15]汤蕴璆,罗应立,梁艳萍,等.电机学[M].北京:机械工业出版社,2005.
[16]王兆安,黄俊.电力电子技术[M].北京:机械工业出版社,2009.
Control System Design and Test of Electric Power Spray Machines
Rong Nannan1, Wang Zhen2, Li Jie3, Wang Ranran1, Qi Miaomiao1
(1.Shandong Agricultural University, College of Mechanical and Electronic Engineering, Tai’an 271018, China; 2. Shandong Provincial Key Laboratory of Horticultural Machineries and Equipments, Tai’an 271018, China; 3.State Grid Taian Power Supply Company, Tai’an 271018, China)
Abstract:For the development of modern electric power of agricultural machinery automation status of immature, to make up for the insufficient of electric sprayer in remote intelligent control, designed a self-propelled electric power sprayer control system. Through needs analysis and calculation of the components, developed electric power output device and remote control systems, achieved coordination of the various components and remote control spray operations. Machine power source is 60V lead-acid batteries in series group, form the control system work trial, we can know the whole electric power transmission efficiency is 88.8%, the remote control signal receiving and processing a success rate of 99%; a high-powered machine utilization, life time of 2.98h.
Key words:spray machines; electric power; control system
中图分类号:S491
文献标识码:A
文章编号:1003-188X(2016)12-0254-06
作者简介:荣喃喃(1990-),女,山东济宁人,硕士研究生,(E-mail)xinxinxiangrong05@163.com。通讯作者:王冉冉(1979-),男,山东淄博人,副教授,硕士生导师,(E-mail)wranran@163.com。
基金项目:山东省青少年教育科学规划项目(15BSH073)
收稿日期:2015-12-03
